CIP-2021 : E21B 41/04 : Manipuladores para operaciones bajo el agua, p. ej. conectados temporalmente a las cabeceras de los pozos (manipuladores en general B25J).
CIP-2021 › E › E21 › E21B › E21B 41/00 › E21B 41/04[1] › Manipuladores para operaciones bajo el agua, p. ej. conectados temporalmente a las cabeceras de los pozos (manipuladores en general B25J).
E CONSTRUCCIONES FIJAS.
E21 PERFORACION DEL SUELO O DE LA ROCA; EXPLOTACION MINERA.
E21B PERFORACION DEL SUELO O DE LA ROCA (explotación minera o de canteras E21C; excavación de pozos, galerías o túneles E21D ); EXTRACCION DE PETROLEO, GAS, AGUA O MATERIALES SOLUBLES O FUNDIBLES O DE UNA SUSPENSION DE MATERIAS MINERALES A PARTIR DE POZOS.
E21B 41/00 Materiales o accesorios no cubiertos por los grupos E21B 15/00 - E21B 40/00.
E21B 41/04 · Manipuladores para operaciones bajo el agua, p. ej. conectados temporalmente a las cabeceras de los pozos (manipuladores en general B25J).
CIP2021: Invenciones publicadas en esta sección.
Robot de brazo manipulador subacuático.
(24/06/2020). Solicitante/s: Eelume AS. Inventor/es: PETTERSEN,KRISTIN Y, LILJEBÄCK,PÅL, SØRENSEN,ASGEIR J, STAVDAHL,ØYVIND, LUND,FREDRIK, TRANSETH,AKSEL A, GRAVDAHL,JAN TOMMY.
Un robot serpiente subacuático que comprende:
una pluralidad de enlaces que están conectados entre sí mediante módulos de articulaciones para generar un movimiento de flexión del robot, en donde los módulos de articulaciones accionan activamente el movimiento de los enlaces entre sí y son activados por uno o más actuadores y el robot se flexiona en dos o más articulaciones para generar un movimiento ondulante;
múltiples dispositivos de empuje ubicados en diferentes puntos a lo largo de la longitud del robot para aplicar empuje al robot para propulsión subacuática y opcionalmente como guía; y
al menos una herramienta , o al menos un punto de conexión para una herramienta, unida al robot;
en donde el movimiento de flexión y/o los dispositivos de empuje permiten el movimiento del robot y el control de la orientación y/o ubicación de la herramienta con algunos o todos los enlaces del robot que actúan como enlaces de un brazo manipulador.
PDF original: ES-2811977_T3.pdf
(25/03/2020) Grillete submarino para cargas pesadas, que comprende un cuerpo del grillete equipado con placas laterales (12a, 12b) respectivas y una suspensión intermedia superior para la conexión a una correa de elevación, un cable de elevación o similar, y también un perno de bloqueo inferior para la conexión a la carga,
- el perno de bloqueo está dispuesto de manera móvil en una disposición de cilindro accionada de manera hidráulica , donde la disposición de cilindro se coloca junto a una de las placas laterales (12a), y donde la disposición de cilindro está dispuesta para ser presurizada por un medio de presión para mover el perno de bloqueo entre una posición retirada en la disposición del…
Dispositivo de actuador de potencia para su uso en condiciones sumergidas en la explotación petrolera.
(11/01/2017) Dispositivo de actuador de potencia para la activación de una cuchilla de corte o dispositivo similar en un sistema sumergido tal como un dispositivo antierupción tal como se usa en la explotación petrolera, en el que el actuador de potencia tiene un motor eléctrico que incluye una armadura , en el que el motor acciona un elemento actuador desplazable por medio de un engranaje planetario y elementos de transmisión , y en el que el actuador de potencia comprende al menos dos conexiones de tornillo-tuerca paralelas y que actúan conjuntamente, conectadas al elemento actuador , y en el que los elementos de transmisión comprenden una rueda de accionamiento que acciona de manera sincrónica un tornillo o una tuerca en cada una de las al menos dos conexiones de…
Aparato y método para la conexión de conductos.
(30/08/2013) Un aparato para conectar extremos adyacentes de unos primer y segundo conductos, donde unos brazos de guía están fijados a un extremo del segundo conducto, comprendiendo el aparato:
- una unidad de armazón que incluye un punto de montaje para montar el extremo del primer conducto en una posición fija;
- una guía conectada a la unidad de armazón,
caracterizado porque la guía incluye unas primera y segunda formaciones de guía para recibir los brazos de guía del segundo conducto ; y el aparato además comprende
- un carro móvil montado sobre la unidad de armazón y que incluye ranuras para acoplarse a los brazos de guía, siendo el carro desplazable desde una primera posición donde las ranuras se alinean con las formaciones de guía de modo que, en uso, los brazos de guía pueden introducirse…
APARATO PARA DESPLEGAR UN OBJETO HASTA UNA POSICION OBJETIVO SUBMARINA Y METODO DE CONTROL DE DICHO APARATO.
(16/05/2005). Ver ilustración. Solicitante/s: BERNARD, FRANCOIS. Inventor/es: BERNARD, FRANCOIS.
Aparato para desplegar un objeto hasta una posición objetivo submarina, dotado de una baliza para transmitir rayos acústicos a un buque en la superficie para determinar la posición del aparato y una pluralidad de propulsores (56(i) i = 1, 2, ...I, siendo I un número entero) para controlar el posicionamiento del aparato con respecto a la posición objetivo submarina, caracterizado en que el aparato está dotado de un reloj de velocidad de sonido para medir de forma continua la velocidad del sonido en un fluido alrededor de dicho aparato y para transmitir los datos de velocidad de sonido en tiempo real a dicho buque en la superficie para la actualización de los perfiles calculados de velocidad de sonido en dicho fluido en función de la profundidad en tiempo real y para corregir dicha determinación de dicha posición.
APARATO Y METODO PARA DESPLEGAR OBJETOS O CARGAS EN EL FONDO DEL MAR.
(01/09/2004). Ver ilustración. Solicitante/s: BERNARD, FRANCOIS. Inventor/es: BERNARD, FRANCOIS.
Aparato para desplegar una carga en el fondo del mar , en el que se acopla la carga a un medio de izada, por ejemplo un cable de izada , a fin de poder bajar el objeto o la carga hasta el fondo del mar desde un buque , compuesto dicho aparato por un cuerpo con medios para sujetar la carga al cuerpo de forma desembragable y un medio de propulsión para desplazar el cuerpo una vez sumergido, incluyendo el medio de propulsión un primer conjunto de propulsores, posicionado de forma descentrada desde el medio para sujetar la carga de forma desembragable, caracterizado porque dicho aparato se dota de un sensor para proporcionar datos en relación con la orientación del aparato y permitir el accionamiento de dichos propulsores de dicho primer conjunto de propulsores con el objeto de proporcionar control de torsión a fin de impedir la rotación de la carga sin emplear cables guía.
DISPOSITIVO Y METODO DE COLOCACION Y DE CONEXION A DISTANCIA DE UN RACOR ACODADO.
(01/05/1990) METODO Y DISPOSITIVO DE COLOCACION A DISTANCIA DE UN RACOR ACODADO. LA COLOCACION SE REALIZA A PARTIR DE UNA INSTALACION PRINCIPAL SITUADA POR ENCIMA DE LA INSTALACION A DISTANCIA. EL DISPOSITIVO O BASTIDOR SOPORTA AL RACOR Y ES MANTENIDO A NIVEL DE UN ORGANO DE SUSPENSION POR UN ELEMENTO DE SUSTENTACION, COMO UN CABLE, ANTES DE SER INMOVILIZADO EN LA INSTALACION A DISTANCIA. EL ORGANO DE SUSPENSION PERMITE, EN EL EXTREMO DEL CABLE, UNOS DESPLAZAMIENTOS DEL BASTIDOR EN UN PLANO HORIZONTAL. EL ORGANO SOPORTE PUEDE DESPLAZARSE PARALELAMENTE A TRES EJES ORTOGONALES ENTRE SI POR MEDIO DE ELEVADORES Y EN ROTACION ALREDEDOR DEL EJE VERTICAL. ESTOS DOS ORGANOS PERMITEN EL POSICIONAMIENTO DEL BASTIDOR Y DEL RACOR …
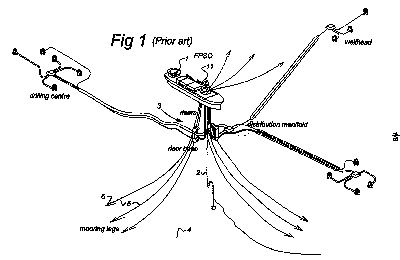
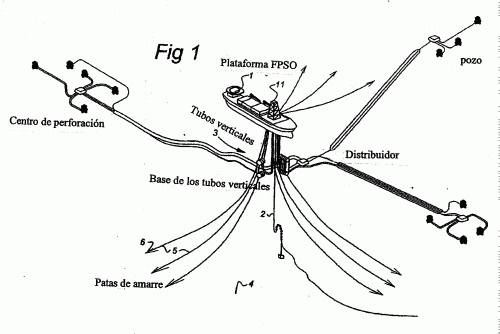
PERFECCIONAMIENTOS EN INSTALACIONES SUBMARINAS.
(01/08/1978). Solicitante/s: SOCIETE NATIONALE ELF AQUITAINE.
Resumen no disponible.
{kind=link}
{kind=link}