CIP-2021 : B25J 19/04 : para la visión.
CIP-2021 › B › B25 › B25J › B25J 19/00 › B25J 19/04[2] › para la visión.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 19/00 Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
B25J 19/04 · · para la visión.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
SISTEMA DE CONEXIÓN Y DESCONEXIÓN AUTOMÁTICA DE CONTENEDORES REFRIGERADOS.
(19/09/2019). Solicitante/s: HERNANDEZ HERNANDEZ, Alba. Inventor/es: HERNANDEZ HERNANDEZ,Alba.
Sistema de conexión y desconexión automática de contenedores refrigerados.
Sistema que permite de forma automatizada la conexión y desconexión de contenedores refrigerados, contando el sistema con: Un adaptador dispuesto sobre cada contenedor y provisto de un conector de conexión frontal; un sistema de guiado según direcciones (x, y) de una plataforma móvil provista de al menos una cámara de reconocimiento óptico y con un brazo de extensible provisto en su extremo con un adaptador de conexión frontal y unos medios de control encargados de la búsqueda del adaptador de cada contenedor, desplazamiento de la plataforma móvil, y aviso a un sistema de control de la acción realizada. El sistema reduce costes de mano de obra, evita accidentes de trabajo, reduce la factura de la luz, así como el tiempo de desconexión de cada contenedor.
PDF original: ES-2725127_A1.pdf
Robot- máquina automática de pintado de estructuras (R-MAPE).
(09/01/2019). Solicitante/s: ROCA VILARIÑO, David. Inventor/es: ROCA VILARIÑO,David.
Robot-Máquina Automática de Pintado de Estructuras (R-MAPE) dotada de una cabina de supervisión y control , con estructura para movimiento de traslación longitudinal con carro con movimiento transversal y sistema de giro de torre telescópica con movimiento vertical , brazo telescópico horizontal y robot de pintado . Incorpora sistema de almacenamiento con depósitos para pintura y bombas neumáticas para impulsión de pintura a la pistola incorporada en el robot . Incorpora cámaras de control de vigilancia y hardware de visión artificial mediante escáner láser 3D , cámaras inteligentes 3D, sensores de distancia focal y láser de medición integrado en robot para reconocimiento de geometría estructural y acabado superficial, con adquisición de imágenes y posterior procesado de las mismas con software de visión con el que se consigue trayectoria y guiado de robot para el pintado automático de la estructura.
PDF original: ES-2695627_A1.pdf
Sistema de control y posicionamiento para determinar la posición relativa entre un elemento de revestimiento de desgaste intercambiable y una posición de montaje predeterminada sobre una pared sometida a desgaste y el uso de una cámara para esta finalidad.
(29/03/2017) Un sistema de control y posicionamiento para la indicación de la condición de montaje de un elemento de revestimiento de desgaste intercambiable en una superficie de una pared que está sometida a desgaste, que puede estar constituido por, por ejemplo, la superficie interior de un tambor giratorio en una trituradora de mineral, y en donde el elemento de revestimiento de desgaste es soportado en el extremo libre de un brazo de maniobra que es un componente de una disposición de elevación que se controla durante el manejo del elemento de revestimiento de desgaste durante una operación de montaje por parte de un…
ROBOT CON SOPORTE PORTA HERRAMIENTAS.
(16/06/2015) Robot con soporte portaherramientas, siendo del tipo de robots utilizados en la manipulación de artefactos sospechosos, los cuales disponen de un brazo articulado, rematado en una pinza, a través de la cual manipulan los artefactos, de forma que el extremo libre del brazo articulado o la pinza incorporan una cámara de visión, y el cuerpo del robot monta un soporte porta herramientas, definido por una estructura de forma general en "U" que por sus alas se ancla al cuerpo del robot y en su alma presenta, al menos, dos habitáculos de alojamiento de respectivas herramientas asociadas a un conjunto definido por: la herramienta en sí; una batería de alimentación…
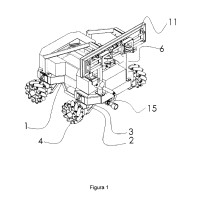
MÁQUINA ROBOTIZADA Y/O TELECOMANDADA PARA RETIRO E INSERCIÓN DE EQUIPOS SWITCHGEAR, COMPRENDE CHASIS; RUEDAS; SOPORTE; ESTRUCTURA; CÁMARA; Y CONTROLES; Y PROCEDIMIENTO.
(11/06/2015). Ver ilustración. Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: CARMONA ACOSTA,Carlos.
Máquina robotizada y/o telecomandada para retiro e inserción de equipos switchgear que elimina el riesgo de arco eléctrico al operador, comprende: un chasis principal que estructura toda la máquina; un conjunto motriz que permite que la máquina se desplace en el plano completo; un sistema soporte que permite unir el conjunto motriz al chasis; una estructura superior que soporta un mecanismo de tracción para que el equipo switchgear sea retirado e insertado; al menos una cámara de visión; y un tablero de fuerza, un tablero de control y una interfaz hombre máquina, los cuales tienen la función de proveer de energía y control a la máquina robótica. Además, se protege el procedimiento de retiro e inserción del equipo switchgear.
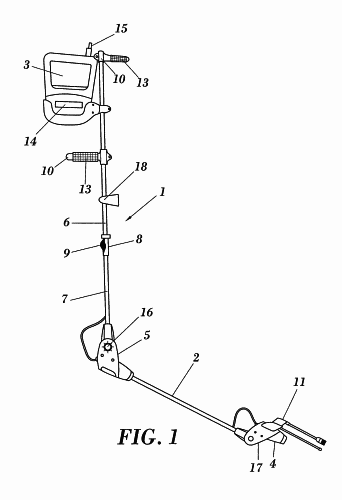
BRAZO EXTENSIBLE DE INSPECCION Y OPERACION.
(16/02/2006). Ver ilustración. Solicitante/s: PRAESENTIS, S.L. Inventor/es: TEXIDOR CALSINA,JORDI.
Brazo extensible de inspección y operación. Brazo extensible de inspección y operación que permite visualizar el estado de superficies o elementos situados en puntos de difícil acceso, incluso subacuáticos y que a su vez es válido para realizar ciertas actuaciones correctoras sobre ellos, tales como limpieza, pintado o pequeñas reparaciones. La invención está constituida por un brazo superior de maniobra que incluye una pantalla para visualizar las imágenes captadas por una cámara instalada en el brazo inferior de actuación, que también incorpora un elemento porta-accesorios en el que se acoplan distintos dispositivos auxiliares tales como cepillos, pinceles o similares. Ambos brazos se encuentran articulados entre sí y son extensibles telescópicamente, lo que permite acceder con la cámara y el porta-accesorios a puntos de difícil acceso.
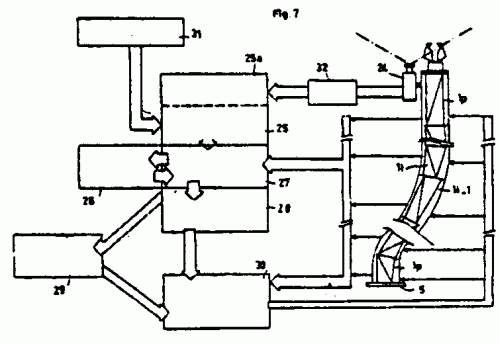
SISTEMA DE DETECCION DE OBJETOS A LOCALIZAR EN UNA ESCENA, ESPECIALMENTE PARA ROBOT DE RECOLECCION.
(01/01/1994). Ver ilustración. Solicitante/s: SOCIETE D'APPLICATIONS GENERALES D'ELECTRICITE ET DE MECANIQUE SAGEM. Inventor/es: CHOQUART, PASCAL, MOREL, NATHALIE, RABATEL, GILLES.
SISTEMA DE DETECCION DE OBJETOS A LOCALIZAR EN UNA ESCENA, ESPECIALMENTE PARA ROBOTS RECOLECTORES. EL SISTEMA COMPRENDE UNA CAMARA DE TOMA DE VISTAS , UN FLASCH Y MEDIOS DE TRATAMIENTO DE IMAGENES. LA CAMARA ES DEL TIPO DE CAPTADOR CCD Y DE TIEMPO DE INTEGRACION VARIABLE. LOS MEDIOS DE TRATAMIENTO DE IMAGENES COMPRENDEN MEDIOS PARA DISPARAR EL FLASH DE MANERA SINCRONIZADA CON LOS PERIODOS DE INTEGRACION DE LA CAMARA Y DETENERLO PARA QUE SOLAMENTE APORTE LA ENERGIA NECESARIA DURANTE DICHOS PERIODOS DE INTEGRACION. EL SISTEMA SE APLICA BIEN A LA DETECCION DE FRUTAS A RECOLECTAR CON AYUDA DE UN ROBOT.
SISTEMA DE VISION ARTIFICIAL PARA LA RECOLECCION ROBOTIZADA DE FRUTOS.
(01/01/1994). Ver ilustración. Solicitante/s: INDUSTRIAS ALBAJAR, S.A.. Inventor/es: JUSTE PEREZ, FLORENTINO, ALBAJAR BARRON, FERNANDO.
SISTEMA DE VISION ARTIFICIAL PARA LA RECOLECCION ROBOTIZADA DE FRUTOS, QUE COMPRENDE UN EQUIPO DE ADQUISICION DE IMAGEN CONSISTENTE EN ELEMENTOS SENSORES PARA CONSEGUIR LA IMAGEN, A TRAVES DE FILTROS, QUE ES TOMADA POR UNA CAMARA DE VIDEO FLANQUEADA POR DOS FLASHES DE ILUMINACION, DE DISPARO SINCRONIZADO CON LA TOMA DE IMAGEN, INSTALANDO SOBRE LA CAMARA UN PARASOL ANTIDESLUMBRANTE, DE MODO QUE DICHA CAMARA ENVIA LA SEÑAL ANALOGICA A UN EQUIPO ANALIZADOR DE IMAGENES QUE COMPRENDE UN HARDWARE Y UN SOFTWARE, RECIBIENDO DICHA SEÑAL UNA TARJETA DIGITALIZADORA INSTALADA EN UN SLOT DE UN ORDENADOR, ALMACENANDOSE LOS DATOS EN LA MEMORIA, DE MODO QUE UNA VEZ PROCESADA LA OPERACION, SE CALCULA EL CENTROIDE DE LA REGION CONSIDERADA COMO FRUTO PARA EFECTUAR UNA TRANSFORMACION DE COORDENADAS DE ESTE A LAS COORDENADAS UTILIZADAS POR EL ROBOT RECOLECTOR, PARA SER ENVIADAS MEDIANTE INTERFACE AL DICHO ROBOT PARA QUE ACTUE.
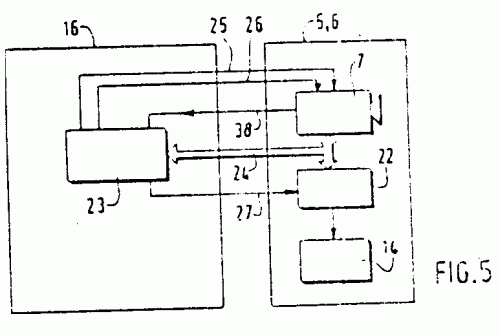
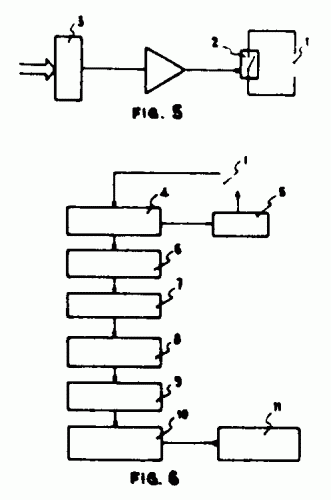
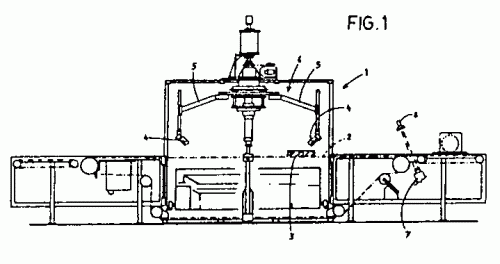
APARATO PARA CONTROLAR LOS ELEMENTOS DE APLICACION DE POR LO MENOS UN PRODUCTO, TAL COMO BARNIZ, PINTURA O SIMILAR.
(01/07/1992). Ver ilustración. Solicitante/s: PLANAS POU, JOAQUIN PEREZ POUS, JOSE MARIA.
APARATO PARA CONTROLAR LOS ELEMENTOS DE APLICACION DE POR LO MENOS UN PRODUCTO, TAL COMO BARNIZ, PINTURA O SIMILAR. COMPRENDE MEDIOS DETECTORES DE LA PRESENCIA Y POSICION DE LAS PIEZAS A TRATAR Y MEDIOS DE CONTROL QUE ACTUAN SOBRE LOS ELEMENTOS DE APLICACION DEL PRODUCTO EN FUNCION DE LOS DATOS PROPORCIONADOS POR LOS MEDIOS DETECTORES, Y SE CARACTERIZA PORQUE LOS MEDIOS DETECTORES COMPRENDEN UN DISPOSITIVO DE CONTROL POR VISION ARTIFICIAL QUE DETECTA LAS FORMAS Y LAS SUCESIVAS POSICIONES DE LAS PIEZAS , ACTUANDO LOS MEDIOS DE CONTROL SOBRE LOS ELEMENTOS DE APLICACION DEL PRODUCTO. LOS MEDIOS DE CONTROL PUEDEN ACTUAR BIEN SOBRE VALVULAS PARA ABRIR O CERRAR EL SUMINISTRO DE PRODUCTO, BIEN SOBRE DICHAS VALVULAS Y SOBRE EL DESPLAZAMIENTO DE LOS BRAZOS PARA LA APLICACION DEL PRODUCTO EN EL MOMENTO Y POSICION CONVENIENTES. PERMITE UNA APLICACION REGULAR DEL PRODUCTO A PIEZAS DE FORMAS MUY VARIADAS.
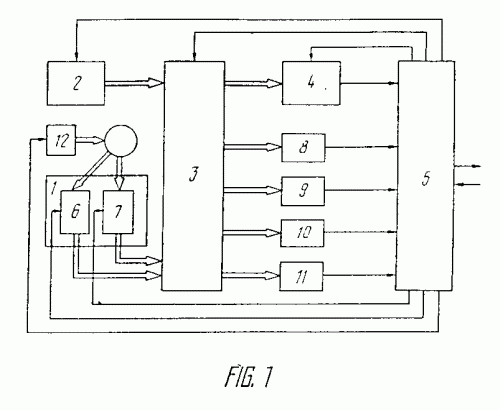
UN DISPOSITIVO PARA EL PROCESAMIENTO DE IMAGENES DE OBJETOS.
(01/03/1991). Ver ilustración. Solicitante/s: FIZICHESKY INSTITUT IMENI P.N. LEBEDEVA AKADEMI NAUK SSSR. Inventor/es: MODESTOVICH BELOMESTNOV, EVGENY, DMITRIEVICH ZOTOV, VLADISLAV, ILIICH PETRENKO, JURY, GENNADIEVICH BASOV, NIKOLAI, FEDOROVICH PLOTNIKOV, ANATOLY, ALEXANDROVICH TOLOKONNIKOV, VLADIMIR, EMMANUILOVICH SHUBIN, VITALY.
UN DISPOSITIVO PARA EL PROCESAMIENTO DE IMAGENES DE OBJETOS QUE INCLUYE UN CONFORMADOR PRINCIPAL Y UN CONFORMADOR AUXILIAR DE IMAGENES COMUNICADOS OPTICAMENTE CON UN CONVERSOR FOTOELECTRICO DE IMAGEN, REALIZADO A PARTIR DE UNA ESTRUCTURA SEMICONDUCTORA MULTICAPA Y CONECTADO CON EL ANALIZADOR DE SEÑALES, Y QUE TAMBIEN INCLUYE UN DISTRIBUIDOR OPTICO DISPUESTO SEGUIDAMENTE POR EL CURSO DEL HAZ ENTRE LA SALIDA DE CADA CONFORMADOR DE IMAGEN Y LA ENTRADA DEL CONVERSOR OPTICO DE IMAGEN.
ROBOT REDUNDANTE DE TIPO MODULAR.
(01/05/1989). Ver ilustración. Solicitante/s: LOGABEX SOCIETE A RESPONSABILITE LIMITEE. Inventor/es: DURAND, DIDIER, CH\'HAYDER, AMEUR, DIAZ, CONSTANTINO.
LA INVENCION SE REFIERE A UN ROBOT REDUNDANTE DE TIPO MODULAR, QUE PERMITE DESPLAZAR UN TERMINAL DE UNA SITUACION INICIAL HACIA UNA SITUACION FINAL. ESTE ROBOT COMPRENDE UNA SUCESION DE MODULOS, CADA UNO CONSTITUIDO POR UNA PLATAFORMA Y POR SEIS ACCIONADORES DISPUESTOS SEGUN UNA ARQUITECTURA ANGULADA CERRADA, UN SISTEMA DE CAPTADORES ASOCIADO A CADA MODULO, Y UNOS MEDIOS DE MANDO QUE PERMITEN DETERMINAR UNA CONFIGURACION DEL ROBOT QUE CORRESPONDE A LA SITUACION FINAL A ALCANZAR POR EL TERMINAL Y PARA CONDICIONAR LOS ACCIONADORES PARA DISPONER LOS DIVERSOS MODULOS SEGUN ESTA CONFIGURACION. ESTOS MEDIOS DE MANDO COMPRENDEN EN PARTICULAR MEDIOS DE ALMACENADO DE LOS ESPACIOS ACCESIBLES PARA CADA PLATAFORMA, MEDIOS DE TOMA DE LA SITUACION FINAL A ALCANZAR, MEDIOS DE CALCULO DE LA CONFIGURACION DEL ROBOT, Y MEDIOS DE CALCULO DE ESTADOS DE LOS ACCIONADORES Y UNA INTERFAZ DE CONDICIONADO DE ESTOS ULTIMOS.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}