CIP-2021 : B25J 15/06 : con medios de retención magnéticos o que funcionan por succión.
CIP-2021 › B › B25 › B25J › B25J 15/00 › B25J 15/06[1] › con medios de retención magnéticos o que funcionan por succión.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 15/00 Cabezas de aprehensión.
B25J 15/06 · con medios de retención magnéticos o que funcionan por succión.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento y sistema para la recepción, elevación y transporte de componentes ferromagnéticos.
(12/02/2014) Procedimiento para la recepción, elevación y transporte de al menos un componente ferromagnético, en particular para la recepción, elevación y transporte de una pila de varias chapas planas, en el que con una disposición magnética , que comprende al menos dos sistemas magnéticos , desde cada uno de los sistemas magnéticos se genera una fuerza de retención magnética sobre el al menos un componente, caracterizado por que se mide el flujo magnético de cada sistema magnético y se regula cada sistema magnético con respecto al flujo, especialmente igualando los flujos de todos los sistemas magnéticos entre sí.
Dispositivo y procedimiento para el agarre sin contacto de placas de vidrio.
(04/09/2013) Dispositivo para el agarre sin contacto de placas de vidrio, en particular de placas de vidrio del orden de magnitudde varios metros cuadrados, con las siguientes características:
a) al menos una placa de oscilación en forma de plana, rectangular, apta para oscilación, con al menos ungenerador de oscilación , en la que las cuatro esquinas de la placa de oscilación se forman, respectivamente,por una superficie parcial cuadrada , y en la que cada una de estas superficies parciales presenta en suscuatro esquinas unos ensanchamientos en forma de lengüetas y en la que las superficies parciales están unidasentre sí por medio de nervaduras ,
b) cada superficie parcial presenta un orificio central para el alojamiento de un tubo de aspiración , instaladoen el lado superior, para la…
Tipo de ventosa sin contacto.
(21/08/2013) Una ventosa del tipo sin contacto, que comprende un cuerpo principal que tiene un agujero de suministro deaire comprimido formado en una parte central del mismo, y una superficie ensanchada hacia fuera formada en unextremo inferior del agujero de suministro; una guía de aire montada en el cuerpo principal que tiene un rebaje de flujo de entrada central que comunica con el agujero de suministro, al menos una trayecto de circulación quees formado desde el rebaje de flujo de entrada a través de una superficie de pared, y un agujero de succión deforma anular que se extiende desde una superficie inferior entre una superficie inferior de una parte central de laguía de aire y una superficie inferior de una parte exterior de la guía de aire , cuyo agujero de succión está conectado…
Dispositivo para agarrar un objeto por succión.
(15/03/2013) Dispositivo para agarrar un objeto por succión, dicho dispositivo comprende:
una placa permeable de soporte ;
una capa de material flexible dispuesta en la placa de soporte;
una cámara a baja presión dispuesta sobre la placa de soporte en el lado opuesto de la capa de materialflexible,
en donde la capa de material flexible es de un material no permeable, caracterizada porque la capa está provista deuna pluralidad de grietas que discurren desde una superficie hacia la superficie opuesta.
MÁQUINA ENCAJADORA Y MÉTODO PARA ENCAJAR PAQUETES EN UNA CAJA DE TRANSPORTE.
(20/07/2012) Máquina encajadora y método para encajar paquetes en una caja de transporte.
La máquina comprende una cinta de alimentación primaria , un carril de alimentación de paquetes, una transportadora de suministro de cajas a la zona de encajado, y comprende además un brazo robótica articulado provisto de dos porciones articuladas entre sí, y una de ellas a la estructura de la máquina; una de dichas porciones comprende un cabezal giratorio de sujeción y transporte de los paquetes , provisto de un conjunto de ventosas , siendo el cabezal o las ventosas susceptibles de desplazamiento vertical.
El método comprende el suministro de paquetes, empujado y posicionado de los paquetes, posicionamiento del extremo del brazo robótica articulado, orientación…
Utilaje compacto con ventosas, para robot de manipulación.
(28/06/2012) Utilaje para la sujeción de productos relativamente ligeros por medio de ventosa (s), cuyo utilaje puede estar fijado sobre un robot manipulador de tipo rápido y comprende generadores de vacío en forma de cartuchos , ventosas y un cuerpo en forma de bloque compacto de material apropiado del tipo de material termoplástico, compuesto o una resina, cuyo cuerpo está dispuesto para reunir dichos cartuchos y dichas ventosas, y para instalar un circuito interno extracorto entre los dos, comportando dicho cuerpo :
- una cámara de llegada del aire comprimido para la alimentación global de los diferentes cartuchos ,
- una cámara de retención…
Sistema y método de manipulación de materiales.
(16/05/2012) Un sistema de manipulación de materiales, que tiene un conjunto de ventosas que se puede aplicar con un objeto y se puede mover para desplazar el objeto, comprendiendo dicho sistema de manipulación de materiales: una fuente de aire comprimido que se puede accionar para generar un flujo de aire comprimido a través de una conducción de suministro ;
una ventosa que tiene una zona de sellado perimetral para aplicarse a una superficie del objeto y sellar sustancialmente la misma, teniendo dicha ventosa una cavidad definida por dicha zona de sellado perimetral y dicha superficie del objeto , cuando dicha ventosa está aplicada con la superficie del objeto ;
un dispositivo venturi en comunicación de fluido con…
Instalación de procesamiento y procedimiento de procesamiento para la separación de residuos marginales.
(25/04/2012) Instalación de procesamiento para la separación de partes de piezas de trabajo , en particular residuosmarginales de placas, en la que la instalación de procesamiento presenta un aparato de separación con almenos un peine de separación con varios elementos de separación dispuestos adyacentes entre sí en unplano del peine y una instalación de manipulación para la generación de un movimiento relativo (R, R') entreel aparato de separación y la pieza de trabajo , en la que el movimiento relativo (R, R') está dirigidotransversalmente al plano del peine y en su extensión longitudinal , en la que los elementos de separación están dispuestos esencialmente paralelos y a distancias (a) iguales, caracterizada…
(14/03/2012) Un robot de amarre para sujetar de manera liberable un buque amarrado a un muelle o a un segundo buque, incluyendo el robot de amarre:
un elemento (1, 1') de acoplamiento atractivo acoplable, de manera liberable, con una superficie para sujetar el buque amarrado ;
una guía alargada sustancialmente vertical a la cual está fijo de manera deslizante el elemento (1, 1') de acoplamiento, para subir y bajar el elemento (1, 1') de acoplamiento;
un carril sustancialmente horizontal al cual está sujeto, de manera deslizante, el elemento atractivo, estando alineado el carril horizontal en paralelo al…
Aparato de agarre por vacío.
(14/03/2012) Un dispositivo asidor que tiene una campana de agarre flexible , la cual incluye una base y una pluralidad de pasos o canales, caracterizado por que:
la base esta formada en torno a un primer orificio central y tiene un contorno o circunferencia predeterminada, rodeada por un labio flexible que se extiende en torno a la circunferencia de la base y se extiende hacia abajo hasta un reborde circunferencial , de tal modo que la pluralidad de canales pasan radialmente hacia fuera desde el primer orificio central y hacia abajo por el labio hasta llegar a una distancia predeterminada desde el reborde , de tal manera que el labio y el reborde son adaptables para adecuarse o ajustarse a una pieza de trabajo cuando se crea una diferencia de presiones entre la campana y la pieza de trabajo;
una base de…
SISTEMA DE CAMBIO DE HERRAMIENTAS.
(14/03/2012) Sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas, que comprende una traviesa (Q) y una herramienta (T), en el que la herramienta (T) está constituida por al menos un soporte de base de la herramienta y por brazos de herramienta y porque los brazos de herramienta se pueden sustituir individualmente, en el que el soporte de base de la herramienta está dispuesto de forma desmontable para un proceso de equipamiento en la traviesa (Q) desplazable, y después de un cambio de los brazos de herramienta , que se realiza cuando el soporte de base de la herramienta está desmontado, se puede fijar de nuevo en la traviesa (Q), en el que la conexión entre un brazo de la herramienta y el soporte de base de la herramienta se realiza por medio de una pieza de ajuste de acoplamiento , que se inserta de forma…
DISPOSITIVO DE ASIDO CAPAZ DE SUJETAR UN VIAL U OTROS RECIPIENTES SIN UTILIZAR DEDOS MECANICOS Y OTROS DISPOSITIVOS DE ASIDO MECANICOS.
(01/04/2007). Solicitante/s: E. VIRIDIS S.A. Inventor/es: PEDRAZZINI, GIANANDREA.
Dispositivo de asido para viales o recipientes similares, que comprende un cuerpo tubular fijado sobre un extremo de un eje vertical de soporte móvil y unos medios de sujeción asociados a dicho cuerpo tubular , comprendiendo dichos medios de sujeción unos elementos de asido no mecánicos , capaces de ser conectados a un extremo de un vial o de un recipiente mediante un contacto suave cara a cara, caracterizado porque dichos elementos de sujeción comprenden un imán permanente móvil axialmente en el interior del cuerpo tubular mediante un émbolo alojado en un cilindro entre una posición de reposo en un receptáculo de alojamiento y una posición de trabajo en el interior de un dispositivo de hierro ferromagnético , pudiendo el dispositivo ferromagnético ser encajado mediante un contacto suave cara a cara con una inserción de hierro ferromagnético fijado sobre dicho extremo del vial o del recipiente.
(01/04/2005) Un aparato de ventosa que comprende: un miembro flexible que tiene un lado delantero que se puede acoplar con una pieza de trabajo y un lado trasero que se puede conectar con un manipulador ; un paso que se extiende desde dicho lado delantero hasta dicho lado trasero de dicho miembro flexible y que se puede comunicar con una fuente de vacío para hacer el vacío sobre dicho lado delantero de dicho miembro flexible; y una cavidad formada en dicho lado delantero de dicho miembro flexible y que tiene un labio que define una abertura dentro de dicha cavidad, pudiéndose acoplar dicho labio con dicha pieza de…
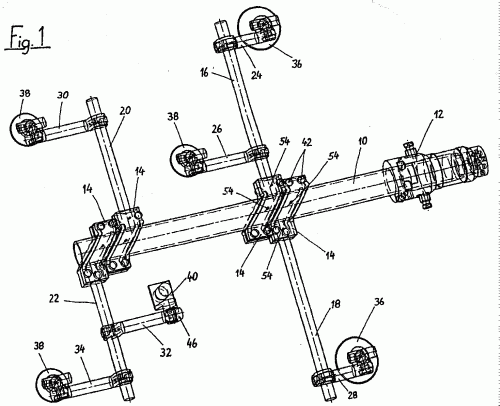
PINZA DE AGARRE DE PIEZAS DE TRABAJO Y PROCEDIMIENTO PARA SU FABRICACION.
(16/02/2004). Ver ilustración. Solicitante/s: BILSING AUTOMATION GMBH. Inventor/es: BILSING, ALFRED.
Pinza de agarre de piezas de trabajo con herramientas de agarre fijadas en tubos y/o barras, en especial para sujetar partes de carrocería en la construcción en bruto de vehículos de motor, en donde tubos circulares (10, 16 22, 24 34) y/o barras se unen entre sí por fricción, por medio de piezas de apriete (14, 32, 46 50) a sujetar mediante tornillos , y a las herramientas de agarre , caracterizada porque la posición relativa de los tubos aislados (10, 16 22, 24 34) o barras y de las piezas de apriete (14, 32, 46 50) unidas respectivamente a los mismos es determinada por taladros alineados, accesibles desde el exterior, en los tubos o barras y las piezas de apriete.
APARATO DE VACIO Y METODO PARA DIMENSIONAR Y MANIPULAR MATERIALES.
(16/01/2001). Solicitante/s: W.L. GORE & ASSOCIATES, INC.. Inventor/es: REIS, BRADLEY, E., HOOVER, STEVEN, C., ADKINS, KEITH, D., LYTLE, WILLIAM, G.
SE PRESENTA UN METODO Y UN APARATO PARA DIMENSIONAR Y MANIPULAR UN MATERIAL CONFORMADO MEDIANTE LA APLICACION SELECTIVA DE VACIO Y/O PRESION POSITIVA AL MATERIAL CONFORMADO.
ROBOTS DE TRANSPORTE Y POSICIONAMIENTO.
(16/05/1999) UN ROBOT TIENE UN BRAZO DE TRABAJO QUE LLEVA UNA BASE QUE ELLA MISMA LLEVA UNAS BARRAS DE SOPORTE Y UNAS VENTOSAS DE SUCCION . PARA MEJORAR EL POSICIONAMIENTO DE UN OBJETO TRANSPORTADO POR EL ROBOT, PUEDE DISPONERSE UN MIEMBRO DE CONEXION GIRATORIO ASI COMO UN PRIMER MIEMBRO Y UN SEGUNDO MIEMBRO . EL SEGUNDO MIEMBRO PUEDE MOVERSE EN UNA PRIMERA DIRECCION CON RELACION AL PRIMER MIEMBRO BAJO EL CONTROL DE UN PRIMER MEDIO DE CONTROL TAL COMO UN CILINDRO , Y LA BASE SE MUEVE CON RELACION AL SEGUNDO MIEMBRO EN UNA SEGUNDA DIRECCION SUBSTANCIALMENTE PERPENDICULAR A LA PRIMERA DIRECCION BAJO EL CONTROL…
TRANSPORTADOR Y VOLTEADOR DE GRANDES PIEZAS.
(16/02/1999). Ver ilustración. Solicitante/s: TORRES MARTINEZ,MANUEL. Inventor/es: TORRES MARTINEZ,MANUEL.
TRANSPORTADOR Y VOLTEADOR DE GRANDES PIEZAS, CONSTA DE UN EQUIPO DE TRANSPORTE Y UN EQUIPO DE VOLTEO . AMBOS PRESENTAN SENDAS PLATAFORMAS (2 Y 5) RESPECTIVAMENTE, QUE COMPORTAN UNA MULTIPLICIDAD DE SOPORTES EXTENSIBLES , YENDO DISPUESTO EL EQUIPO DE TRANSPORTE EN UN PUENTE ; MIENTRAS QUE LA PLATAFORMA DEL EQUIPO DE VOLTEO VA MONTADA EN UNA ESTRUCTURA CON POSIBILIDAD DE GIRAR SOBRE SI MISMA Y DE DESPLAZARSE SELECTIVAMENTE EN ALTURA. LOS SOPORTES EXTENSIBLES SE CONSTITUYEN A MODO DE CILINDROS NEUMATICOS Y PARA SU ACCIONAMIENTO VAN MONTADOS POR HILERAS EN UN PERFIL COMUN QUE CONFORMA EN SI MISMO LAS VIAS PARA EL AIRE A PRESION Y PARA EL VACIO. LA PLATAFORMA DE TRANSPORTE VA DISPUESTA DE MANERA QUE PUEDE PASAR DE UNA DISPOSICION RIGIDA A OTRA FLOTANTE PARA SU CENTRADO.
BRAZO DE ROBOT DE UN ROBOT DE PORTAL PLANO.
(01/12/1997) LA INVENCION SE REFIERE A UN BRAZO DE UN ROBOT DE PORTAL PLANO CON UN CABEZAL DE TRABAJO, QUE ES MOVIBLE EN TRES DIRECCIONES X,Y,Z LINEALES Y ALREDEDOR DE DOS EJES (A,C), Y CON UNA HERRAMIENTA (A) PROVISTA EN EL CABEZAL DE TRABAJO PARA EL REGISTRO DE LOS TRAMOS DE CARTON PLANO EN EL APILAMIENTO (K) DE PRECINTOS POR MEDIO DE UN DISPOSITIVO DE ASPIRACION APLICADO SOBRE LA SUPERFICIE DEL APILAMIENTO Y UN DISPOSITIVO DE AGARRE OSCILANTE, QUE SE CARACTERIZA POR LAS SIGUIENTES CARACTERISTICAS: EL ACOPLAMIENTO MECANICO ENTRE EL CABEZAL DE TRABAJO Y LA HERRAMIENTA SEPARABLE DE EL SE CONSIGUE POR MEDIO DE UNA MORZADA MULTIPLE (M) PREVISTA…
ESTACION DE MONTAJE DE UNA ASIENTO DE VEHICULO EN EL INTERIOR DEL HABITACULO.
(16/11/1997). Solicitante/s: RENAULT-AUTOMATION. Inventor/es: DUPUIS, CLAUDE.
ESTACION DE MONTAJE PARA UN ASIENTO EN EL INTERIOR DEL HABITACULO DE UN VEHICULO , COMPRENDIENDO EL ASIENTO UNA ESTRUCTURA INFERIOR (1A) DE FIJACION A LA CAJA DEL VEHICULO, COMPRENDIENDO LA ESTACION UN EMPLAZAMIENTO DE ESPERA APROVISIONADO CON ASIENTOS POR UN PRIMER TRANSPORTADOR , UN EMPLAZAMIENTO DE REFERENCIA APROVISIONADO CON CAJAS DE VEHICULOS POR UN SEGUNDO TRANSPORTADOR , UN ROBOT DE TRANSFERENCIA DE ASIENTOS DESDE EL EMPLAZAMIENTO DE ESPERA HACIA EL EMPLAZAMIENTO DE REFERENCIA DE LAS CAJAS , COMPRENDIENDO EL ROBOT UN PRENSOR DE EXTREMO CONSTITUIDO POR DOS CAJONES Y DE ASPIRACION CUYAS CARAS ACTIVAS ESTAN CONTENIDAS EN PLANOS SENSIBLEMENTE PERPENDICULARES, SIENDO SOPORTADOS LOS CAJONES CON DESPLAZAMIENTO POR UNA ESTRUCTURA DE SOSTENIMIENTO ARTICULADO EN EL EXTREMO DEL BRAZO DE ROBOT.
APARATO DE CONTROL DE VENTOSA.
(16/07/1997). Solicitante/s: BLATT, JOHN A. Inventor/es: GOLDEN, MICHAEL J., BLATT, JOHN A.
UN APARATO DE CONTROL PARA UNA VENTOSA PARA APLICAR UN VACIO EN Y LIBERARLO DE UNA VENTOSA Y QUE INCLUYE UN TUBO DE VENTURI PARA CREAR UN VACIO DENTRO DE LA VENTOSA AL DEJAR CIRCULAR AIRE A PRESION A SU TRAVES. HAY OTRO TUBO PARA LA CORRIENTE DE AIRE QUE SE EXTIENDE A TRAVES DEL RECEPTACULO PARA INYECTAR UNA CORRIENTE DE AIRE A PRESION A LA VENTOSA Y LIBERAR ASI EL VACIO FORMADO DENTRO DE ELLA. UN DETECTOR DETECTA EL NIVEL DE VACIO ALCANZADO DENTRO DE LA VENTOSA . EL APARATO DE CONTROL ENVIA UNA SEÑAL DE REALIMENTACION A UN CONTROLADOR EXTERNO LA CUAL INDICA QUE SE HA ALCANZADO UN NIVEL DE VACIO SELECCIONABLE PREDETERMINADO. EL APARATO DE CONTROL RESPONDE AL DETECTOR Y A LAS SEÑALES PROCEDENTES DE UN CONTROLAR EXTERNO PARA APLICAR UN VACIO A LA VENTOSA.
CAMARA PARA HIDRATAR LENTES DE CONTACTO.
(01/05/1997). Solicitante/s: JOHNSON & JOHNSON VISION PRODUCTS, INC.. Inventor/es: KINDT-LARSEN, TURE.
SE PRESENTAN MIEMBROS MACHO Y HEMBRA PARA LENTES DE CONTACTO. CADA MIEMBRO ES CAPAZ DE SUJETAR LA LENTE DE CONTACTO MIENTRAS SE MUEVE DE ESTACION A ESTACION DURANTE EL PROCESO DE HIDRATACION. EL MIEMBRO HEMBRA SE AJUSTA AL MIEMBRO MACHO FORMANDO UNA CAMARA. CADA UNO DE LOS MIEMBROS CONTIENE UNA LINEA COLOCADA CENTRALMENTE PARA QUE ASI LAS DOS SUPERFICIES DE CONTACTO SEAN LAVADAS CON ABUNDANCIA DE AGUA DURANTE EL PROCESO DE HIDRATACION Y EL DRENAJE TIENE LUGAR RADIALMENTE EN LA PARTE EXTERIOR DE LOS MIEMBROS DE LA CAMARA MACHO Y HEMBRA EMPAREJADOS. ESTOS MIEMBROS PUEDEN SER PRODUCIDOS EN UN MARCO CON VARIOS MIEMBROS, NORMALMENTE OCHO POR MARCO, PARA PERMITIR QUE EL PROCESO SEA FACIL DE REALIZAR. EL PROCESO SE PUEDE AUTOMATIZAR TOTALMENTE, ALCANZANDOSE UN CONTROL DE LA LENTE COMPLETO Y POSITIVO DURANTE CUALQUIER ETAPA DEL PROCESO A TRAVES DEL PASO DE MONTAJE.
DISPOSITIVO PARA LA APREHENSION DE PIEZAS FLEXIBLES AISLADAS O ADYACENTES, SU MANIPULACION Y SU DEPOSICION, ESPECIALMENTE PIEZAS DE CUERO Y SIMILARES.
(16/04/1993). Solicitante/s: CENTRE TECHNIQUE CUIR CHAUSSURE MAROQUINERIE. Inventor/es: DARRAGON, JEROME, POUSSET, MICHEL.
EL DISPOSITIVO COMPRENDE UN APREHENSOR (P), CON UNA CARCASA RIGIDA Y ESTANCA , CUYA CARA INFERIOR ESTA EQUIPADA DE UNA MULTIPLICIDAD DE VENTOSAS . LA CARCASA ESTA LLEVADA Y DESPLAZADA MEDIANTE UN BRAZO MANIPULADOR U OTRO ROBOT. LAS VENTOSAS ESTAN UNIDAS INDIVIDUALMENTE A UNA FUENTE DE VACIO. SE PREVEN ELECTROCOMPUERTAS ALOJADAS EN LA CARCASA PARA CONTROLAR SEPARADAMENTE LA ACTIVACION DE CADA VENTOSA. LA SELECCION DE LAS VENTOSAS ACTIVADAS PUEDE SER ASI REALIZADO EN FUNCION DEL CONTORNO PARTICULAR DE CADA PIEZA A COGER.
PROCEDIMIENTO PARA FABRICAR FIGURAS CON MEDIO DE FIJACION A UNA SUPERFICIE.
(16/08/1992). Ver ilustración. Solicitante/s: IMSERTEX, S.A. Inventor/es: RODRIGUEZ MONEDERO, MIGUEL.
PROCEDIMIENTO PARA FABRICAR FIGURAS CON MEDIO DE FIJACION A UNA SUPERFICIE, CUYO PROCEDIMIENTO COMPRENDE MOLDEAR EN POLIESTIRENO UNA PIEZA QUE REPRESENTA UNA FIGURA DE ANIMAL O COSA, CUYAS PIEZAS SE DISPONEN O ALMACENAN SIN PINTAR EN UNA SUPERFICIE, Y CUYAS PIEZAS SON COGIDAS POR UNOS BRAZOS ACCIONADOS HIDRAULICAMENTE QUE VAN PASANDO LAS PIEZAS POR UNOS PUNTOS EN LOS QUE LA SUPERFICIE PRESENTA UNAS ESCOTADURAS ENFRENTADAS A UNAS PISTOLAS QUE PINTAN LOS REHUNDIDOS, RESALTES Y EXTREMOS LIBRES DE LOS NERVIOS QUE DELIMITAN LOS REHUNDIDOS DE DIFERENTES COLORES, MIENTRAS QUE UN ULTIMO BRAZO COGE CADA UNA DE LAS PIEZAS TERMINADAS DE PINTAR Y LAS DEPOSITA EN EL EXTREMO OPUESTO DE LA SUPERFICIE.
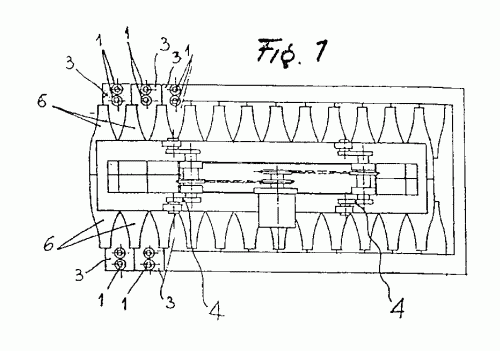
CABEZAL DE TOMA DE GRUPOS ORDENADOS DE BOTELLAS, TRASLADO DE LOS MISMOS Y DEPOSITADOR DE ELLOS EN PUNTOS EXACTOS DESEADOS.
(01/06/1989). Ver ilustración. Solicitante/s: REVUELTA LOZANO, ANTONIO.
CABEZAL DE TOMA DE GRUPOS ORDENADOS DE BOTELLAS, TRASLADO DE LOS MISMOS Y DEPOSITADOR DE ELLOS EN PUNTOS EXACTOS DESEADOS, POR SUCCION, EN EL QUE EL CABEZAL PRESENTA UN ARMAZON UNICO DE HILERAS DE VENTOSAS ESTATICAS PARA LOS DOS FRENTES DE BOTELLAS DE LA CAPA INFERIOR Y UNAS HILERAS MOVILES DE VENTOSAS CENTRALES, PORTA-BOTELLAS SUPERPUESTAS GUALDRAPEADAS DEL PROPIO GRUPO, CUALES HILERAS SON MOVILES POR BRAZOS-CIGUEÑALES DE MOVIMIENTOS LATERALES CON TRAYECTORIA CIRCULAR, QUE ELEVAN TALES BOTELLAS SUPERIORES SALVANDO LAS CRESTAS DE LAS BOTELLAS FIJAS INFERIORES, LOGRANDO, A VOLUNTAD, UNA NUEVA POSICION CONVENIENTE DE LAS BOTELLAS GUALDRAPEADAS EN RELACION CON LOS DOS FRENTES INFERIORES DE BOTELLAS FIJAS Y QUE DICHOS BRAZOS-CIGUEÑALES, ANTES DE ELEVAR EL CONJUNTO, CUANDO LAS VENTOSAS HAN CONTACTADO CON LAS BOTELLAS A TRASLADAR Y DEPOSITAR, TENGAN LA FACULTAD DE OBTENER UN MOVIMIENTO DE REMOCION DE LAS BOTELLAS SUPERIORES POR MOVIMIENTOS CORTOS Y RAPIDOS DE VAIVEN DE TALES BRAZOS-CIGUEÑALES.
VENTOSA DE PRENSION Y MANIPULACION DE PEQUEÑOS OBJETOS DELICADOS.
(16/01/1987). Solicitante/s: PONT-A-MOUSSON S.A..
Ventosa de presión y manipulación de pequeños objetos delicados, caracterizada porque siendo del tipo que incluye un cuerpo cilíndrico susceptible de fijarse por un extremo a un manipulador industrial o robot y de empalmarse a un tubo de vacío y que incluye en otro extremo un cono de prensión, y del tipo realizado con un material flexible y elástico, como un elastómero alimenticio, y que el cono de prensión queda revestido y prolongado en su parte inferior ensanchada por una camisa flexible o falda acampanada, se caracteriza igualmente en que el cono de prensión de elástomero en la parte inferior deformable del cuerpo cilíndrico de la ventosa de silicona, queda revestido interiormente por una camisa o falda acampanada fina de látex.
{kind=link}
{kind=link}
{kind=link}
{kind=link}