Vehículo de manipulación.
Vehículo de manipulación provisto de una cabina de conducción (1) y que comprende un dispositivo de transporte de una herramienta (2) que incluye una pluma telescópica (3) montada de forma pivotante en un plano vertical paralelo al plano longitudinal del vehículo (B-B) por medio de un gato de elevación (4) bajo el control de un grupo motopropulsor (5) situado en un cárter lateral (6),
cuando el vehículo permanece sobre un suelo horizontal (7) mediante las ruedas (8, 9, 10, 11) de las cuales al menos dos delanteras o traseras son accionadas por el indicado grupo motopropulsor, comprendiendo el grupo motopropulsor un motor (5A), una bomba hidrostática (5B) y una bomba hidráulica (5C), estando el mencionado motor (5A), la indicada bomba hidrostática (5B) y dicha bomba hidráulica (5C) montados en línea, estando esta línea inclinada en un plano horizontal con relación al plano longitudinal del vehículo (B-B), cuando el vehículo reposa sobre un suelo horizontal (7), caracterizado por que al menos un 40% de la superficie de dicho motor (5A), proyectada sobre un plano horizontal, cuando el vehículo reposa sobre un suelo horizontal, así como las indicadas bombas (5B, 5C) están situadas bajo la indicada pluma (3), y por que el indicado motor (5A) está igualmente inclinado con relación a un plano vertical (C-C), cuando el vehículo reposa sobre un suelo horizontal (7).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2016/053044.
Solicitante: MANITOU BF.
Nacionalidad solicitante: Francia.
Dirección: 430 Rue de l'Aubinière 44150 Ancenis FRANCIA.
Inventor/es: DELZENNE,STÉPHANE, POUPARD,SYLVAIN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66F9/065 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66F ELEVACION, LEVANTAMIENTO, REMOLQUE O EMPUJE, NO PREVISTOS EN OTRO LUGAR, p. ej. DISPOSITIVOS CUYA FUERZA DE LEVANTAMIENTO O EMPUJE SE APLICA DIRECTAMENTE SOBRE LA SUPERFICIE DE LA CARGA (montaje de islas artificiales sobre pilotes o soportes similares E02B 17/00; andamiajes combinados con aparatos de elevación E04G 1/22, E04G 3/28; dispositivos de elevación para encofrados deslizantes E04G 11/24; sobreelevación de edificios E04G 23/06; puntales o tirantes E04G 25/00; elevadores u otros dispositivos de elevación de escaleras E06C 7/12; puntales para minería E21D 15/00). › B66F 9/00 Dispositivos para elevación o descenso de mercancías voluminosas o pesadas con fines de carga o descarga (ascensores móviles o transportables instalados o asociados a edificios, especialmente adaptados para permitir la transferencia de una a otra parte del edificio u otra construcción B66B 9/16; grúas B66C). › sin mástiles (gatos móviles de tipo garaje montados sobre carretillas o rodillos B66F 5/00).
- B66F9/075 B66F 9/00 […] › Características o detalles de estructura.
PDF original: ES-2750204_T3.pdf
Fragmento de la descripción:
Vehículo de manipulación
La invención se refiere a un vehículo de manipulación provisto de una cabina de conducción y que comprende un dispositivo de transporte de una herramienta, por ejemplo un cangilón de carga, una horquilla o una plataforma. La invención se refiere en particular a un vehículo que es adecuado para la manipulación de cargas industriales, por ejemplo en los depósitos de mercancías o en obras, en situaciones en las cuales el vehículo corre el riesgo de disponer de un espacio limitado de maniobra.
Un vehículo de manipulación de este tipo se describe en el documento de patente FR 2765865.
Este vehículo de manipulación provisto de una cabina de conducción comprende un dispositivo de transporte de cargas que incluye una pluma telescópica montada de forma pivotante en un plano vertical paralelo al plano longitudinal del vehículo, cuando el vehículo se encuentra sobre un suelo horizontal, por medio de un gato de elevación. Un grupo motopropulsor asegura el control de la transmisión de las ruedas motrices el de los gatos, de elevación, de inclinación, de compensación y los que aseguran el despliegue y el repliegue de la pluma telescópica. Este grupo motopropulsor está dispuesto en una zona situada de forma general bajo el asiento del conductor de la cabina.
Ahora bien, hoy en día, los motores son cada vez más voluminosos por motivos de potencia y motivos medio ambientales y puede ser problemático colocarlos así bajo el asiento, manteniendo un sitio suficiente de confort en la cabina.
Otro vehículo de manipulación comercializado por la Sociedad WEIDEMANN y referenciado como T4108 es conocido.
Este vehículo de manipulación provisto de una cabina de conducción comprende un dispositivo de transporte de herramienta que comprende una pluma telescópica montada de forma pivotante en un plano vertical, cuando el vehículo se apoya sobre un suelo horizontal.
Comprende un cárter lateral que contiene el grupo motopropulsor.
La pluma en cuanto a la misma está situada entre la cabina y este cárter y la anchura de dicho vehículo es por consiguiente igual a la suma de la anchura de la cabina, la anchura de la pluma y de la anchura del grupo motopropulsor.
El documento de patente FR 2 849 009 describe un vehículo de manipulación según el preámbulo de la reivindicación 1.
El fin de la invención es reducir la anchura de ocupación de espacio de dicho vehículo de manipulación, proponiendo un vehículo pequeño y poco voluminoso manteniendo un confort de conducción apreciable.
Para ello, la invención propone un vehículo de manipulación provisto de una cabina de conducción y comprendiendo un dispositivo de transporte de una herramienta que comprende una pluma telescópica montada de forma pivotante en un plano vertical paralelo al plano longitudinal del vehículo por medio de un gato de elevación bajo el control de un grupo motopropulsor situado en un cárter lateral, cuando el vehículo reposa sobre un suelo horizontal mediante ruedas de las cuales al menos dos delanteras o traseras son accionadas por el indicado grupo motopropulsor, comprendiendo el grupo motopropulsor un motor, una bomba hidrostática y una bomba hidráulica, caracterizado por que al menos un 40% de la superficie de dicho motor, proyectada sobre un plano horizontal, cuando el vehículo reposa sobre un suelo horizontal, así como las indicadas bombas están situadas bajo la indicada pluma.
Por «situado bajo la pluma», se entiende directamente situado por debajo de la pluma, por el mismo lado del plano longitudinal del vehículo que la pluma.
De este modo, es posible obtener una anchura total del vehículo de manipulación inferior a 1, 5 metros.
El indicado motor, la mencionada bomba hidrostática y dicha bomba hidráulica están montados en línea, siendo esta línea inclinada en un plano horizontal con relación al plano longitudinal del vehículo, cuando el vehículo reposa sobre un suelo horizontal.
Ventajosamente, la indicada línea está inclinada por un ángulo comprendido entre 10 y 25 grados y de preferencia sustancialmente igual a 19 grados.
El mencionado motor está igualmente inclinado con relación a un plano vertical, cuando el vehículo reposa sobre un suelo horizontal, y ventajosamente el ángulo de esta inclinación es sustancialmente igual a 10 grados.
El mencionado cárter lateral está de preferencia situado entre las ruedas delanteras y las ruedas traseras.
De preferencia, las indicadas bombas están situadas entre la indicada cabina de conducción y dicho gato de elevación de la pluma.
Gracias a las características anteriores, tomadas por separado o en combinación, se obtiene una minimización de la anchura y de la altura del cárter lateral que contiene el grupo motopropulsor. A título de ejemplo, la cabina puede tener una anchura del orden de los 0, 87 metros y el cárter lateral una anchura del orden de los 0, 62 metros.
Una minimización de la altura del cárter lateral es igualmente realizada, con el fin de no estorbar el campo de visión del conductor en la cabina por la pluma situada por encima del cárter lateral, presentando esta pluma a título de ejemplo una altura máxima del orden de los 1, 36 metros con relación al suelo.
El indicado cárter lateral puede contener igualmente un sistema de refrigeración situado en un soporte pivotante según un eje sustancialmente vertical, cuando el vehículo reposa sobre un suelo horizontal.
Así, el dispositivo de refrigeración puede fácilmente ser desplazado, para asegurar un acceso al grupo motopropulsor.
De preferencia, la indicada pluma está montada sobre una biela de pivotamiento con un primer eje de rotación fijo y un segundo eje de rotación conectado con dicho gato de elevación, presentando el indicado gato un ángulo de oscilación sustancialmente igual a 5 grados.
Y ventajosamente, el indicado gato comprende un pie rotativo fijo cuya distancia con el eje de las dos ruedas traseras es inferior al 40% de la distancia entre los dos ejes de las ruedas delanteras y traseras.
De preferencia, la indicada herramienta está fijada sobre un separador situado lateralmente en el extremo delantero de la indicada pluma, por el lado de la cabina.
A título de ejemplo, la diferencia entre el plano longitudinal del tablero y el plano longitudinal de la pluma es del orden de los 0, 29 metros.
De este modo, una visibilidad cómoda de la herramienta por el conductor está asegurada, no obstante de la posición lateral de la pluma.
Ventajosamente, las cuatro ruedas delanteras y traseras son accionadas por el grupo motopropulsor.
La invención se describe a continuación más en detalle con la ayuda de las figuras que solo representan un modo de realización preferido de la invención.
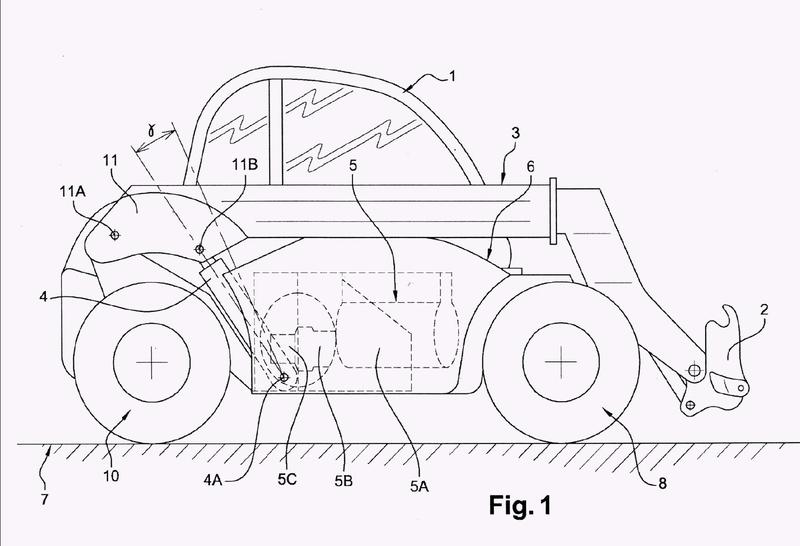
La figura 1 es una vista lateral de un vehículo de manipulación conforme a la invención.
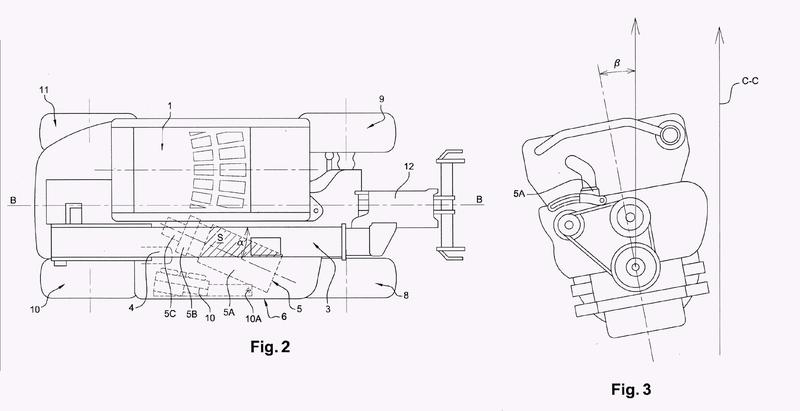
La figura 2 es una vista por encima de este mismo vehículo de manipulación.
La figura 3 es una vista en sección según el plano A-A de la figura 2.
Como se ha representado en las figuras 1 y 2, un vehículo de manipulación provisto de una cabina de conducción 1 comprende un dispositivo de transporte de una herramienta 2, aquí un cangilón de carga, incluyendo una pluma telescópica 3 montada de forma pivotante en un plano vertical paralelo al plano longitudinal B-B del vehículo por medio de un gato de elevación 4 bajo el control de un grupo motopropulsor 5 situado en un cárter lateral 6 dispuesto entre las ruedas delanteras y las ruedas traseras 8 a 11, cuando el vehículo reposa sobre un suelo horizontal 7 por las ruedas de las cuales al menos las dos delanteras 8, 9 o traseras 10, 11 son accionadas por el grupo motopropulsor 5. Este plano longitudinal B-B del vehículo es el plano de simetría vertical entre ruedas.
Ventajosamente, las cuatro ruedas delanteras y traseras son motrices y accionadas por el grupo motopropulsor.
Según la invención, el grupo motopropulsor 5 está situado al menos en parte bajo la pluma 3.
Este grupo motopropulsor 5 comprende un motor 5A, una bomba hidrostática 5B destinada para el control de la transmisión del vehículo y una bomba hidráulica 5C destinada para el accionamiento de los gatos, de elevación 4, de inclinación, de compensación y los que aseguran el despliegue y el repliegue de la pluma telescópica, que no están todos representados en las figuras en un intento de simplificación.
Más precisamente, al menos un 40% de la superficie del motor S, proyectada sobre un...
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
MONTACARGAS DE ESTRUCTURA COMPACTA, del 21 de Abril de 2020, de EP Equipment Co., Ltd: 1. Montacargas de estructura compacta, compuesto por una carrocería, con una cabina en su parte superior y un asiento en la cabina , la estructura […]
Sistema de posicionamiento de superficies de apriete, del 25 de Marzo de 2020, de CASCADE CORPORATION: Un sistema de control para una mordaza de manejo de carga que se puede montar en un vehículo, teniendo dicha mordaza un par de superficies […]
Sistema de estabilización de máquinas de explotación automotrices, del 18 de Marzo de 2020, de Manitou Italia S.r.l: Un método para controlar estabilizadores de tijera de máquinas de explotación automotrices, tales como manipuladores telescópicos o similares, […]
Sistema de detección de obstáculos para una plataforma de trabajo aérea, del 19 de Febrero de 2020, de JLG INDUSTRIES,INC.: Un conjunto de plataforma que comprende: una plataforma de trabajo que incluye un piso de la plataforma y un riel de seguridad que se extiende […]
Telemanipulador con un sistema de blindaje, del 13 de Noviembre de 2019, de Manitou Italia S.r.l: Un telemanipulador que comprende un sistema de blindaje, el cual, a su vez, comprende: una estructura de cabina para dicho telemanipulador […]
Procedimiento y dispositivo de vigilancia de apoyo para carro que comprende un medio estabilizador, del 5 de Noviembre de 2019, de MANITOU BF: Procedimiento de vigilancia de apoyo para carro que comprende un medio estabilizador, caracterizado por que el mencionado procedimiento comprende las etapas: - de bajada […]
 Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]
Módulos enchufables amovibles para vehículos de manipulación de materiales, del 30 de Septiembre de 2019, de EP Equipment Co., Ltd: 1. Una carrocería del vehículo y un módulo enchufable del controlador de un vehículo de manipulación de materiales, que comprenden:
una carrocería […]