Un sistema y un método para un pronóstico de automóvil mejorado.
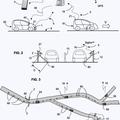
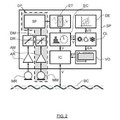
Un método para un pronóstico en tiempo real de un vehículo (403) que utiliza un acelerómetro de tres ejes (401) integrado en un dispositivo de comunicación personal,
que comprende:
orientar dinámicamente el acelerómetro de tres ejes (401) desde una posición arbitraria en una coordenada cartesiana para cada variación en una posición del dispositivo de comunicación personal para que coincida con coordenadas de referencia (X, Y, Z) asignadas al vehículo (403), en el que la orientación dinámica del acelerómetro de tres ejes (401) comprende las etapas de:
asignar las coordenadas de referencia (X, Y, Z) para el vehículo (403) y almacenar las coordenadas en una memoria flash del dispositivo de comunicación personal;
asignar las coordenadas iniciales (Xd, Yd, Zd) al acelerómetro de tres ejes (401) y almacenar las coordenadas en la memoria flash del dispositivo de comunicación personal;
calcular unas primeras coordenadas intermedias (Xo, Yo, Zo) utilizando al menos tres primeros valores escalares, al menos tres segundos valores escalares y al menos tres terceros valores escalares;
calcular una derivada de primer grado para cada una de las primeras coordenadas intermedias (Xo, Yo, Zo);
calcular unas segundas coordenadas intermedias (Xog, Yog, Zog);
calcular un balanceo (θ) y un cabeceo (Ψ) entre las coordenadas de referencia (X, Y, Z) y las coordenadas iniciales (Xd, Yd, Zd) respectivamente, del acelerómetro de tres ejes (401), en el que el balanceo (θ ) se calcula como una inversa sinusoidal de la suma de los valores de la coordenada Y de las segundas coordenadas intermedias (Yog) dividida por un producto de la aceleración gravitacional y un número de muestras registradas, y en el que el cabeceo (Ψ) se calcula como un seno inversa de una suma de valores de la coordenada X de las segundas coordenadas intermedias (Xog) dividida por el producto de la aceleración gravitacional y un número de muestras recogidas;
calcular un ángulo (α) entre la coordenada Z de la coordenada inicial (Zd) y la coordenada Z de la coordenada de referencia (Z), en el que el ángulo (α) se calcula como una inversa de coseno de una suma de valores de la coordenada Z de las segundas coordenadas intermedias (Zog) dividida por el producto de la aceleración gravitacional y el número de muestras registradas;
calcular una coordenada corregida (Xcg, Ycg, Zcg) para el acelerómetro de tres ejes (401) basado en la derivada de primer grado para cada una de las primeras coordenadas intermedias (Xo, Yo, Zo); y
asignar la coordenada corregida calculada (Xcg, Ycg, Zcg) en cada siguiente instancia dinámica de ocurrencia de un caso de evento con el dispositivo de comunicación personal, en el que el caso de evento corresponde a la detección de un cambio en la aceleración en una o más de las coordenadas de referencia (X, Y, Z) mediante el acelerómetro de tres ejes (401);
capturar un primer conjunto de información relacionada con una condición de la carretera y un segundo conjunto de información relacionada con el comportamiento del conductor en una ventana de muestra y contar una cantidad de muestra registrada en la ventana de muestra usando el acelerómetro de tres ejes (401) orientado dinámicamente, en el que una velocidad instantánea del vehículo (403) determina la ventana de muestra;
recibir una pluralidad de entradas sensoriales de un sistema de diagnóstico a bordo (404) que está acoplado de manera comunicativa al dispositivo de comunicación personal;
compilar una pluralidad de informes de pronóstico basados en al menos un modelo de análisis predictivo que utiliza el primer conjunto de información y el segundo conjunto de información capturada en conjugación con la pluralidad de entradas sensoriales recibidas; y
representar la pluralidad de informes de pronóstico compilados determinados por los atributos de un usuario.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IN2013/000133.
Solicitante: Tata Consultancy Services Limited.
Inventor/es: SINHA,ANIRUDDHA, BHAUMIK,CHIRABRATA, PAL,ARPAN, GHOSH,KALLOL, BISWAS,PROVAT, CHATTOPADHYAY,TANUSHYAM, SINHARAY,ARIJIT, SYED,MOHD BILAL ARIF.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W40/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Condiciones de la vía.
- B60W50/14 B60W […] › B60W 50/00 Detalles de los sistemas de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Medios para informar o avisar al conductor o provocar su intervención.
PDF original: ES-2740989_T3.pdf
Patentes similares o relacionadas:
Dispositivo para estimar un indicador de estado de una vía de circulación utilizada por un vehículo terrestre, del 16 de Octubre de 2019, de PSA AUTOMOBILES S.A: Dispositivo de análisis (DA) para vehículo terrestre (VT) apropiado para circular por una vía de circulación (VC) y que comprende una estructura de soporte […]
Reconocimiento de carriles de dirección, del 21 de Agosto de 2019, de BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT: Procedimiento para proporcionar una estimación, de si un carril está limitado a una dirección, indicándose la estimación mediante una dimensión, por […]
 Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]
Sistema de compartición de informaciones que utiliza unos sensores de higrometría y de temperatura de calzada, del 29 de Mayo de 2019, de Dreamsafe: Sistema de recogida y de puesta a disposición de informaciones que se refieren al riesgo de helada y/o de formación de placas de hielo sobre la red de carreteras, comprendiendo […]
Procedimiento y sistema para influir en el movimiento de una estructura de vehículo en un automóvil y vehículo controlado y regulado en sus procesos de movimiento, del 30 de Mayo de 2018, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para generar señales para influir en el movimiento de una estructura de vehículo , controlable o regulable en sus procesos de movimiento, de un […]
Método para apoyar el guiado de un vehículo sobre terreno, del 22 de Noviembre de 2017, de BAE SYSTEMS PLC: Un método para apoyar el guiado de un vehículo sobre terreno, en que el método incluye: entrenar al menos un primer clasificador usando un primer conjunto […]
 Procedimiento de estimación del estado de la superficie de una carretera, neumático de estimación del estado de la superficie de una carretera, dispositivo de estimación del estado de la superficie de una carretera y dispositivo de control de vehículo, del 24 de Diciembre de 2014, de KABUSHIKI KAISHA BRIDGESTONE: Un procedimiento de estimación del estado de la superficie de una carretera que comprende:
(a) detectar la vibración de un neumático de un […]
Procedimiento de estimación del estado de la superficie de una carretera, neumático de estimación del estado de la superficie de una carretera, dispositivo de estimación del estado de la superficie de una carretera y dispositivo de control de vehículo, del 24 de Diciembre de 2014, de KABUSHIKI KAISHA BRIDGESTONE: Un procedimiento de estimación del estado de la superficie de una carretera que comprende:
(a) detectar la vibración de un neumático de un […]
 Sistema embarcado en vehículos y método para la detección del estado del asfalto, del 8 de Noviembre de 2012, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema embarcado en vehículos y método para la detección del estado del asfalto. El sistema comprende:
- medios detectores de sonido (MR) […]
Sistema embarcado en vehículos y método para la detección del estado del asfalto, del 8 de Noviembre de 2012, de UNIVERSIDAD POLITECNICA DE MADRID: Sistema embarcado en vehículos y método para la detección del estado del asfalto. El sistema comprende:
- medios detectores de sonido (MR) […]
PROCEDIMIENTO DE ASISTENCIA PARA UN VEHÍCULO, del 23 de Enero de 2012, de RENAULT S.A.S.: Procedimiento de asistencia al control para un vehículo que incluye un grupo moto-propulsor conectado a las ruedas motrices por medio de […]