Sistema y método para estimar el tamaño de objetivo.
Método para estimar el tamaño de objetivo utilizando un espacio escalar de desviaciones estándar de píxel (100),
que comprende las etapas siguientes:
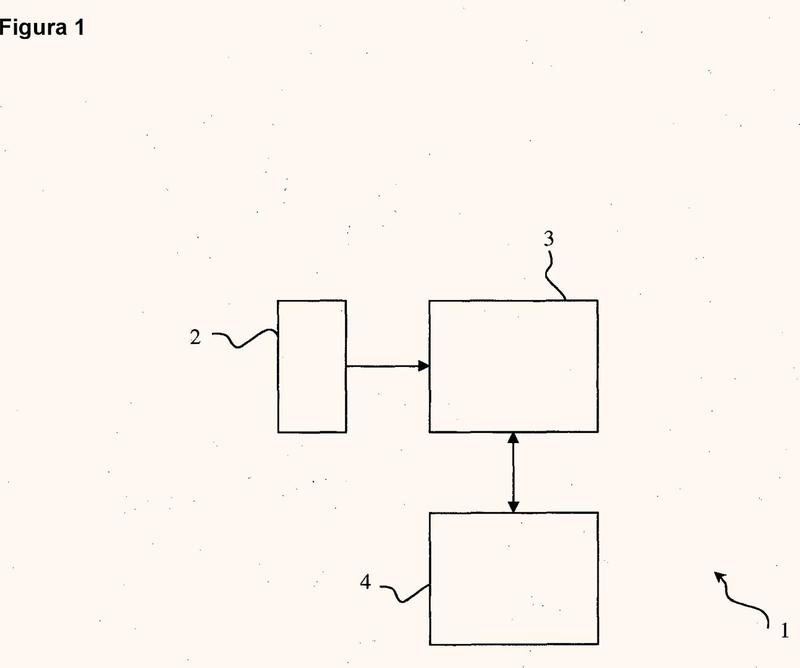
a) recibir una imagen de píxel que incluye por lo menos un objeto objetivo y por lo menos una coordenada de un píxel sobre un objetivo (101),
b) calcular desviaciones estándar de píxel para píxeles que se encuentran dentro de una ventana rectangular centrada alrededor del píxel recibido sobre el objetivo, ampliando sucesivamente la ventana en por lo menos un sentido en su tamaño de paso, partiendo de un tamaño de ventana inicial y obteniendo por lo menos un gráfico del tamaño de ventana frente a la desviación estándar, hasta el tamaño de ventana límite (102), estando el método caracterizado por que comprende las etapas siguientes:
c) comprobar el gráfico para disminuir monotónicamente, si la respuesta es no, entonces ir a la etapa d, si no ir a la etapa e (103),
d) registrar el tamaño de ventana en el punto en que la desviación estándar comienza primero a disminuir con el aumento del tamaño de ventana (104) y entonces, ir a la etapa g,
e) comprobar el tamaño de ventana registrado anteriormente para determinar su existencia, si la respuesta es no, entonces ir a la etapa g, si no ir a la etapa f (105),
f) estimar el tamaño de ventana que encapsula todo el objetivo con el mínimo número posible de píxeles de fondo como el tamaño de ventana registrado en último lugar (106),
g) comprobar el límite de iteración máxima para determinar si se supera, si la respuesta es no, entonces ir a la etapa i, si no ir a la etapa h (107),
h) comprobar el tamaño de ventana registrado anteriormente para determinar su existencia, si la respuesta es no, entonces ir a la etapa j, si no ir a la etapa f (105a),
i) aumentar el tamaño de paso y el tamaño de ventana inicial, que se utiliza para generar el gráfico de desviación estándar en cantidades (108) predeterminadas y entonces, ir a la etapa b,
j) estimar el tamaño de ventana como el tamaño de ventana mínimo predeterminado (109).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2011/055618.
Solicitante: ASELSAN ELEKTRONIK SANAYI VE TICARET ANONIM SIRKETI.
Nacionalidad solicitante: Turquía.
Dirección: Mehmet Akif Ersoy Mahallesi, 296. Cadde No: 16 Macunkoy Ankara TURQUIA.
Inventor/es: AKAGUNDUZ,ERDEM.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06K9/32 FISICA. › G06 CALCULO; CONTEO. › G06K RECONOCIMIENTO DE DATOS; PRESENTACION DE DATOS; SOPORTES DE REGISTROS; MANIPULACION DE SOPORTES DE REGISTROS (impresión per se B41J). › G06K 9/00 Métodos o disposiciones para la lectura o el reconocimiento de caracteres impresos o escritos o el reconocimiento de formas, p. ej. de huellas dactilares (métodos y disposiciones para la lectura de grafos o para la conversión de patrones de parámetros mecánicos, p.e. la fuerza o la presencia, en señales eléctricas G06K 11/00; reconocimiento de la voz G10L 15/00). › Alimentación o centrado del captador de imagen o de la zona de imagen.
PDF original: ES-2574787_T3.pdf
Patentes similares o relacionadas:
 Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Sistema de generación de marcador y método, del 29 de Julio de 2020, de NEC CORPORATION: Un sistema de generación de marcador que comprende:
medios de entrada de imagen de vídeo para proporcionar como entrada una imagen de vídeo;
[…]
Un sistema implementado por ordenador y procedimiento para extraer y reconocer caracteres alfanuméricos de señales de tráfico, del 15 de Abril de 2020, de Tata Consultancy Services Limited: Un sistema implementado por ordenador que tiene: (i) un repositorio configurado para almacenar una plantilla predeterminada que tiene secciones, caracteres alfanuméricos […]
Sistema y método de orientación automatizada para una máquina de movimientos coordinados, del 8 de Enero de 2020, de Recognition Robotics, Inc: Un método de orientación automatizada, que comprende: tomar una imagen inicial de una pluralidad de piezas de trabajo (Wa, Wb, Wc) de forma similar con una cámara […]
Aparato de procesamiento de imágenes, procedimiento de procesamiento de imágenes y programa, del 6 de Noviembre de 2019, de CANON KABUSHIKI KAISHA: Aparato de procesamiento de imágenes, que comprende: una unidad de adquisición de imágenes objetivo configurada para adquirir una imagen […]
 Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Método y aparato para comprobar neumáticos de rueda de vehículo, del 25 de Septiembre de 2019, de NEXION S.p.A: Un método para comprobar los neumáticos en las ruedas de un vehículo que comprende las etapas siguientes:
- cuando el vehículo está […]
Procedimiento para determinar datos de posición de un objeto objetivo en un sistema de referencia, del 11 de Septiembre de 2019, de MBDA Deutschland GmbH: Procedimiento para determinar los datos de posición de un objeto objetivo (Z) en un sistema de referencia desde una posición de observación separada […]
Dispositivo y procedimiento para determinar una diferencia de frecuencia de muestreo, del 10 de Julio de 2019, de Opticom, Dipl.-Ing. Michael Keyhl GmbH (100.0%): Dispositivo para la determinación de una diferencia de la frecuencia de muestreo entre una primera señal (IS1) de información y una segunda señal (IS2) de información, […]
Procedimiento para el control de un dispositivo de faros para un vehículo y dispositivo de faros, del 22 de Mayo de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para el control de un dispositivo de faros para un vehículo , presentando el dispositivo de faros dos faros separados , […]