MECANISMO DE VOLTEO PARA UN APARATO PARA TRANSFERIR BOLSASFLEXIBLES LLENAS DE UN PRODUCTO LÍQUIDO, SUSCEPTIBLE DE FLUIR, DE ALTAVISCOSIDAD O GRANULADO DESDE UN PRIMER CONTENEDOR A UN SEGUNDOCONTENEDOR.
1. Mecanismo de volteo (75) para aparato para transferir bolsas flexibles (103) llenas de un producto líquido,
susceptible de fluir, de alta viscosidad o granulado desde un primer contenedor (101) a un segundo contenedor (102) que incluye:
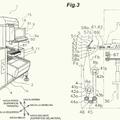
- un soporte de actuador volteador (19) sobre el que se soporta un actuador de volteo (9);
- un actuador de volteo (9) con un cuerpo de actuador de volteo (9a) y un miembro móvil de actuador de volteo;
- un árbol de giro motriz (11) horizontal al suelo y conectado al miembro móvil de actuador;
- al menos una polea (12) unida de forma fija al árbol de giro motriz (11);
- un sustentáculo de volteo (5) que incluye una base de sustentáculo (17) inicialmente paralela al suelo, una pared lateral de sustentáculo (16) conectada a la base de sustentáculo (17), y un borde superior de sustentáculo (18) conectado al extremo superior de la pared lateral de sustentáculo (16) y un extremo adyacente (99) a la base de sustentáculo (17) y opuesto a la pared lateral de sustentáculo (16);
y caracterizado porque el mecanismo de volteo (75) comprende:
- al menos un elemento de transmisión de potencia flexible (13) que se conecta por un extremo a la al menos una polea (12) y por su otro extremo se conectan a un extremo adyacente (99) a la base de sustentáculo (5);
- un árbol de volteo (6) horizontal al suelo, situado por debajo del árbol de giro motriz (11) en la dirección vertical y en torno al cual se voltea el sustentáculo de volteo (5);
- unos medios de guiado lineal de volteo (15a) unidos fijamente al soporte de actuador volteador (19);
- unos medios de guiado lineal de volteo conjugados (15b) alineados con una dirección horizontal y paralela al suelo a lo largo de los cuales se desplazan los medios de guiado lineal de volteo (15a) y el soporte de actuador volteador (19); y
- un soporte base (14) que tiene conectados fijamente los medios de guiado lineal de volteo conjugados (15b) y que se conecta además de forma fija al chasis (1) del aparato;
y porque al accionar el miembro móvil del actuador de volteo (9) en un sentido de giro u otro, el al menos un elemento de transmisión de potencia flexible (13) se enrolla o desenrolla en la al menos una polea (12), el sustentáculo de volteo (5) y el primer contenedor (101) o el segundo contenedor (102) basculan respecto al árbol de volteo (6), y el soporte de actuador volteador (19) y actuador de volteo (9) se desplazan mediante los medios de guiado lineal de volteo (15a) a lo largo de los medios de guiado lineal de volteo conjugados (15b) por la acción de la componente horizontal y paralela al suelo de la fuerza gravitacional que el sustentáculo de volteo (5) y primer contenedor (101) o segundo contenedor (102) ejercen sobre la al menos una polea (12) hasta una nueva posición a lo largo de las guías conjugadas (15b) en donde el al menos un elemento de transmisión de potencia flexible (13) vuelve a alinearse con la dirección vertical y, por tanto, las fuerzas gravitacionales ejercidas sobre la al menos una polea (12) son verticales y no existen componentes de fuerza horizontales y paralelas al suelo una vez se ha establecido el equilibro estático en la al menos una polea (12).
2. Mecanismo de volteo (75) según la reivindicación 1, caracterizado porque el miembro móvil de actuador es un eje de salida motriz, estando dicho eje de salida motriz alineado axialmente en la misma dirección que el árbol de giro motriz (11) y perpendicular a la dirección de desplazamiento del soporte de actuador volteador (19) y el actuador de volteo (9) a lo largo de los medios de guiado lineal conjugados (15b).
3. Mecanismo de volteo (75) según la reivindicación 2, caracterizado porque el miembro móvil de actuador es un eje de salida motriz, siendo dicho eje de salida motriz perpendicular al árbol de giro motriz (11) y paralelo a la dirección de desplazamiento del soporte de actuador volteador (19) y el actuador de volteo (9) a lo largo de los medios de guiado lineal conjugados (15b).
4. Mecanismo de volteo (75) según la reivindicación 1, 2 o 3, caracterizado porque el mecanismo de volteo (75) comprende un reductor (10) cuyo eje de entrada conecta con el eje de salida motriz del miembro móvil de actuador y cuyo eje de salida conecta con el árbol de giro motriz (11).
5. Mecanismo de volteo (75) según la reivindicación 1, caracterizado porque el actuador de volteo comprende un motor (9) con un cuerpo de motor (9a) y un eje de salida motriz, un árbol de giro motriz (11) perpendicular al eje de salida motriz, un reductor (10) cuyo eje de entrada conecta con el eje de salida motriz y cuyo eje de salida conecta con el árbol de giro motriz (11), al menos una polea (12) unida de forma fija a cada uno de los extremos del árbol de giro motriz (11) y al menos un número de elementos de transmisión de potencia flexibles (13) igual al número de poleas (12) y que se conectan cada uno de ellos por su extremo a las respectivas poleas (12) y que por su otro extremo se conectan al extremo adyacente (99) a la base de sustentáculo (17).
6. Mecanismo de volteo (75) según la reivindicación 1, en donde dicho actuador de volteo comprende cilindro fluidodinámico de volteo con un cuerpo de cilindro fluidodinámico como miembro fijo de actuador de volteo y un vástago extensible que tiene unida una cremallera movible respecto el cuerpo de cilindro fluidodinámico de volteo como miembro móvil de volteo, dicho árbol de giro motriz tiene unido un piñón que engrana en la cremallera, estando el piñón soportado en sus extremos laterales de forma articulada respecto al soporte de actuador volteador mediante unos rodamientos de tal forma que ante un avance o retroceso del vástago con cremallera el piñón gira la al menos una polea unida de forma fija al árbol de giro motriz.
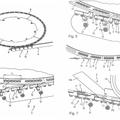
7. Mecanismo de volteo (75) según cualquiera de las reivindicaciones anteriores, caracterizado porque el sustentáculo de volteo (5) comprende además un brazo de volteo (96) alargado en la dirección radial respecto del árbol de volteo (6) y que tiene un extremo distal de brazo (98) y un extremo proximal de brazo (97), estando conectado de forma basculante por su extremo proximal de brazo (97) al árbol de volteo (6) y estando conectado de forma fija a la pared lateral de sustentáculo (16) por su extremo distal, de tal forma que al finalizar el accionamiento del actuador de volteo (9) para voltear el sustentáculo de volteo (5) y el primer contenedor (101) o segundo contenedor (102), el borde superior (18) del sustentáculo de volteo queda por encima de la superficie de transporte (45).
8. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque el mecanismo de volteo (75) comprende:
- al menos un puente estructural (2) fijado al soporte base (14), compuesto por un travesaño (2b) alineado con una dirección horizontal al suelo y dos laterales de puente (2a) alineados con la dirección vertical y conectados a sendos extremos del travesaño (2b);
- unas guías lineales de puente (3) alineados con la dirección vertical y fijadas al chasis (1) del aparato; y
- unos medios de bloqueo y desbloqueo (4) que unen de forma fija los laterales de puente (2a) a las guías lineales de puente (3) en al menos dos posiciones de fijación, una posición superior (4a) y una posición inferior (4b), en la dirección vertical;
y porque cuando los medios de bloqueo y desbloqueo (4) fijan el puente estructural (2) en la posición superior (4a), el aparato se encuentra en posición apta para el trasvasado de bolsas flexibles, y cuando los medios de bloqueo y desbloqueo (4) fijan el puente estructural (2) en la posición superior (4a), el apartado se encuentra en posición que permite el transporte del aparato dentro de un contenedor de carga marítimo y/o terrestre.
9. Aparato según cualquiera de las reivindicaciones anteriores, caracterizado porque la base del sustentáculo (17) comprende una serie de pletinas alargadas y paralelas entre sí y que quedan por debajo de la superficie definida por unos rodillos (91) pertenecientes a un transportador de alimentación de contenedores (90) al introducirse dichas pletinas alargadas entre los huecos existentes entre los rodillos.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201630939.
Solicitante: TELESFORO GONZÁLEZ MAQUINARIA, SL.
Nacionalidad solicitante: España.
Provincia: ALICANTE.
Inventor/es: GONZALEZ OLMOS,TELESFORO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B35/56 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › Orientación de objetos, es decir, cambio de la posición, p. ej. de una sección transversal no uniforme.
PDF original: ES-1171833_U.pdf
Patentes similares o relacionadas:
 Procedimiento y dispositivo para envasar productos de piezas pequeñas apilados, del 29 de Julio de 2020, de THEEGARTEN-PACTEC GMBH & CO. KG: Procedimiento para el envasado de productos (P) de piezas pequeñas, en particular productos de confitería, que se forman dando lugar a grupos de productos (G) […]
Procedimiento y dispositivo para envasar productos de piezas pequeñas apilados, del 29 de Julio de 2020, de THEEGARTEN-PACTEC GMBH & CO. KG: Procedimiento para el envasado de productos (P) de piezas pequeñas, en particular productos de confitería, que se forman dando lugar a grupos de productos (G) […]
Unidad y procedimiento de agrupamiento y alineación de cápsulas, del 13 de Mayo de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una unidad de agrupamiento y alineación de cápsulas para productos de extracción o infusión en envases de multicápsulas, que comprende: - una […]
MÁQUINA PARA EL POSICIONAMIENTO AUTOMÁTICO DE OBJETOS, del 19 de Marzo de 2020, de POSIMAT, SA: 1. Máquina para el posicionamiento automático de objetos, que comprende: - al menos un transportador de entrada configurado para transportar una pluralidad […]
DISPOSITIVO DE SUJECIÓN DE OBJETOS PARA PISTAS DE TRANSFERENCIA Y MÁQUINA PARA MANIPULAR OBJETOS ASOCIADA AL MISMO, del 11 de Febrero de 2020, de MULET VALLES,TOMAS: Dispositivo de sujeción de objetos para pistas de transferencia, que comprende al menos un carro de transferencia configurado para moverse en circuito cerrado […]
Transportador multiformato para una máquina para embalar artículos en recipientes, del 27 de Marzo de 2019, de CT PACK S.R.L.: 1. Un transportador para artículos diseñado para ser instalado en una máquina para embalar primeros y segundos artículos , de diferente […]
 Sistema de envasado, del 1 de Agosto de 2018, de ISHIDA CO., LTD.: Un método de envasar un artículo a envasar en un estado óptimo conectando un servidor externo (Sv) a una pluralidad de aparatos de envasado mediante […]
Sistema de envasado, del 1 de Agosto de 2018, de ISHIDA CO., LTD.: Un método de envasar un artículo a envasar en un estado óptimo conectando un servidor externo (Sv) a una pluralidad de aparatos de envasado mediante […]
Máquina y método para embalar artículos en cajas de cartón, del 2 de Mayo de 2018, de Cama1 S.p.A: Máquina para embalar artículos (A) en cajas de cartón en depósitos o cajas, con una sección de carga que comprende: - un área de entrada de artículos , […]
Máquina y método para envasar cápsulas en paquetes multi-cápsula, del 1 de Marzo de 2017, de GIMA S.p.A: Máquina para hacer y envasar cápsulas para la extracción e infusión de productos en paquetes multicápsula, las cápsulas que incluyen: - un cuerpo rígido […]