SISTEMA DE ESTABILIZACIÓN PARA LA COMPENSACIÓN DEL MOVIMIENTO ANGULAR EN PLATAFORMAS LIDAR MÓVILES.
Sistema de estabilización para la compensación angular en plataformas LIDAR móviles que comprende,
al menos, un LIDAR y un sistema óptico deflector que se caracteriza porque dicho sistema deflector comprende, al menos, un deflector móvil en sus ejes de pitch y roll; y donde dicho deflector está configurado para mantener el apuntamiento del LIDAR en una dirección dada mediante un mecanismo de compensación angular controlado electrónicamente.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331105.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Inventor/es: CAMPS CARMONA,ADRIANO JOSE, ROCADENBOSCH BURILLO,Francisco, TIANA I ALSINA,Jordi, BERMEJO SÁNCHEZ,Sergio, VALL-LLOSSERA FERRAN,Mercedes Magdalena.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/88 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas de lidar, especialmente adaptados para aplicaciones específicas.
Fragmento de la descripción:
SISTEMA DE ESTABILIZACIÓN PARA LA COMPENSACIÓN DEL MOVIMIENTO ANGULAR EN PLATAFORMAS LIDAR MÓVILES
El objeto de la presente invención es un sistema opto-electrónico para el mantenimiento del apuntamiento en una dirección dada de un sistema LIDAR embarcado en una plataforma móvil. La invención, por tanto, se enmarca en el sector de la teledetección óptica mediante LIDAR y geoestabilización aplicadas entre otros campos a la medida de la velocidad del viento desde plataformas móviles. Estas últimas pueden ser tanto plataformas marinas flotantes (barcos, boyas o plataformas) como aerotransportadas o satélites.
Estado de la técnica
Un sistema LIDAR (que es un acrónimo del inglés Light Detection and Ranging) es una tecnología que permite determinar la distancia desde un emisor láser a un objeto o superficie utilizando un haz láser pulsado. Al igual que ocurre con la tecnología radar, donde se utilizan ondas de radio en vez de luz, la distancia al objeto se determina midiendo el tiempo de retraso entre la emisión del pulso y su detección a través de la señal reflejada.
Los sistemas de teledetección LIDAR para la medida de la velocidad del viento utilizan habitualmente el efecto Doppler resultante de la interacción del haz láser emitido en una dirección dada con los constituyentes atmosféricos (moléculas y aerosoles en suspensión) que actúan como trazadores de la velocidad del viento. Esta dirección es habitualmente la vertical (cénit o nadir), que se tomará como ejemplo no limitativo.
Actualmente, tanto los sistemas LIDAR de viento de tipo pulsado, como los de onda continua ("continuous wave" o CW) incorporan sistemas de barrido y capacidades de enfoque (caso de los CW) de forma que es posible estimar con precisión las tres componentes de la velocidad del viento. Dado que, habitualmente, estos sistemas LIDAR utilizan un mismo telescopio en emisión y recepción, y a efectos de facilitar la comprensión técnica, estos sistemas LIDAR pueden modelarse como emisores-
receptores de un haz de luz láser siguiendo las generatrices de un cono (en adelante, el cono LIDAR de sondeo), a partir del cual junto con la interacción con los constituyentes atmosféricos, se estima el vector velocidad a diferentes alturas del cono tal y como se describe en: [T. Ando, S. Kameyama, Y. Hirano, "All-fiber coherente doppler LIDAR technologies at Mitsubishi Electric Corporation," IOP Conf. Ser.: Earth Environ. Sci., 1, pp. 012011 (2008). Disponible en
http://iopscience.iop.org/17551315/1/1/012011/pdf ? (accedida 16 Oct. 2012)] y [J.P. Cariou, M. Boquet, "LeospherePulsed LIDAR Principles," LEOSPHERE. Contribution to UpWind WP6 on Remote Sensing Devices. 32 pp. Disponible en http://www.upwind.eu/media/576/D6.1.1.pdf (accedida 16 Oct. 2012)].
Así, por ejemplo, en los sistemas LIDAR pulsados, la medida de la componente de velocidad a lo largo de la línea de visión del instrumento viene siempre resuelta en distancia, quedando dicha distancia determinada a partir del retardo o tiempo de vuelo ("time of flight") entre el pulso emitido y el recibido. La línea de visión se mueve según un patrón cónico de barrido (cono LIDAR de sondeo) que permite recuperar las tres componentes de la velocidad del viento a partir de medidas intermedias realizadas en diferentes puntos del cono. En los sistemas LIDAR CW se mantiene igualmente un patrón cónico de barrido, pero el subsistema óptico de emisión/recepción enfoca sucesivamente a distintas alturas o planos de observación para determinar la velocidad del viento.
Actualmente, las medidas de viento sobre la superficie terrestre utilizando sistemas LIDAR están bien caracterizadas y cumplen con estándares de calibración merced a comparar las medidas de viento proporcionadas por los sistemas LIDAR con las proporcionadas por anemómetros de precisión en mástiles fijos. Por el contrario, cuando estos mismos sistemas LIDAR miden en la superficie marina en apuntamiento cenital embarcados en plataformas flotantes (por ejemplo, boyas meteo-oceánicas para la estimación del recurso eólico en parques eólicos "off-shore") o desde aviones (apuntamiento nadir), los movimientos angulares (alabeo o "roll", cabeceo o "pitch", y guiñada de rumbo o "yaw") y de traslación (movimiento de longitudinal de avance/retroceso o "surge", movimiento lateral de deriva o "sway", y movimiento
vertical o "heave") de éstas a lo largo del tiempo (en total 6 grados de libertad) causan medidas erróneas de la velocidad del viento [T. Rogers, M. Young, K. Briggs, G. Randall, H. Hughes, "Remóte Sensig on Moving Offshore Platforms," EWEA Offshore (Nov. 29-Dec. 1, 2011, Amsterdam, The Netherlands)], [J.O. Hellevang, "Effect of wave motion on wind LIDAR measurements - Comparison testing with controlled motion applied," Remote Sensing Measurement for Renewable Energy (May 22, 2012, DTU Riso, Denmark)].
En la figura 1 se muestran los seis posibles movimientos (tres de translación y tres de rotación) que puede sufrir un LIDAR cuando éste se coloca, por ejemplo, encima de una plataforma off-shore flotante. En adelante se hace referencia al movimiento longitudinal de avance/retroceso como "surge" (eje X), al movimiento lateral de deriva como "sway" (eje Y), y al movimiento vertical como "heave" (eje Z). Los movimientos angulares de "roll", "pitch", y "yaw" atienden a las rotaciones en los ejes X, Y, y Z, respectivamente.
Recientemente, se ha presentado una simulación de los errores en la estimación de la velocidad del viento mediante sistemas LIDAR embarcados en plataformas flotantes:[G. Wolken-Mohlmann, H. Lilov, B. Lange, "Simulation of motion induced measurement errors for wind measurement susing LIDAR on floating platforms," 15th International Symposium for the Advancement of Boundary-Layer Remote Sensing (ISARS), Paris, France, 28-30 June 2010,
http://www.isars2010.uvsq.fr/images/stories/PosterExtAbstracts/P WIN08 WolkenMohl mann.pdfl.
De estos seis grados de libertad, los de más difícil corrección son los movimientos angulares en "pitch" y "roll" ya que salvo para ángulos muy pequeños (unos pocos grados) no es posible corregirlos "a posteriori" de la fase de medida (por ejemplo, mediante software) y requieren, por tanto, un sistema propio de compensación del movimiento de la plataforma.
Los movimientos en "pitch" y "roll" son típicamente rápidos, implican un
desapuntamiento del LIDAR respecto de la vertical, conllevan una fuerte variación de la altura de medida y se traducen en una disminución de la velocidad medida (sesgo o bias). Así, las traslaciones de la plataforma en X y en Y son irrelevantes, ya que los sistemas LIDAR de medida de vientos presuponen homogeneidad horizontal del campo de viento en una área relativamente extensa alrededor del instrumento (habitualmente de varios km). La contribución de la velocidad de traslación en X e Y sobre la velocidad del viento es aditiva y constante dentro de la resolución temporal de LIDAR (tiempo que el instrumento invierte en realizar un medida) y, por tanto, de fácil corrección (basta con restar a la velocidad medida del viento la velocidad de la plataforma). El movimiento de traslación de la plataforma en Z (heave) y la componente de velocidad de la plataforma en esta dirección son respectivamente aditivas a la altura de medida y a la componente vertical de velocidad del viento y, aunque con mayores variabilidades que para las componentes X e Y, su corrección es sencilla, ya que basta con restar estas contribuciones a la medida. El movimiento angular en "yaw" es típicamente muy lento con respecto a la resolución temporal de la medida, por lo que puede suponerse comportamiento estático dentro de la resolución temporal de medida.
Las soluciones actuales de compensación del movimiento en plataformas off-shore flotantes y/o boyas instrumentadas con un LIDAR de medida de viento simplemente no utilizan compensación alguna quedando, por tanto, muy limitadas las condiciones de operación o, a lo sumo, se empiezan a centrar en métodos pasivos de compensación mecánica (balancines cardánicos donde se monta el instrumento LIDAR) [FLIDAR, "Cost-effective, acurate offshore wind resource assessments," http://www.flidar.com , accedida 16 Oct. 2012]. En sistemas muy avanzados, el NOAA (National Oceanics and Atmospheric Administration) utiliza un sistema computerizado de corrección software que interactúa con el sistema de barrido del LIDAR pulsado a partir de la información de actitud del barco (ángulos de "pitch", "roll", y "yaw") obtenida a partir de sensores angulares (giróscopos y un magnetómetro) [J. E. James, "Beam Pointing Stabilization for a Shipboard Volumen Imaging LIDAR," Report NRL/MR/7220-95-7646, Naval Research Lab., Washington, DC 20375-5320 (Jan. 26, 1995)], [R. J. Hill, W....
Reivindicaciones:
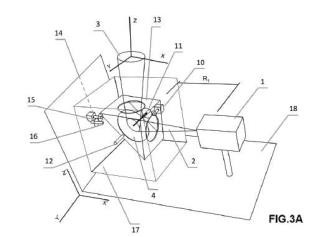
1 - Sistema de estabilización para la compensación del movimiento angular en plataformas LIDAR móviles caracterizado porque comprende, al menos, un LIDAR (1) y un deflector móvil (4, E2) configurado para mantener el apuntamiento del LIDAR (1) en una dirección dada mediante un mecanismo de compensación angular (10 a 21) controlado por unos sistemas electrónicos de control que comprenden, a su vez, al menos un sensor de actitud, dicho mecanismo de compensación angular comprende un elemento fijo (18) que sujeta una rótula giratoria (17), de tal forma que un saliente del elemento fijo (18) constituye un primer eje (16) encastado en la citada rótula giratoria (17) y configurado para compensar las rotaciones en roll; y que además comprende un segundo eje (12), ortogonal al primer eje (16) e igualmente encastado en la rótula giratoria (17), de tal forma que dicho segundo eje (12) es el encargado de compensar las rotaciones en pitch; y donde el segundo eje (12) se encasta, a su vez, en dos pletinas (19) solidarias con la montura (13) del deflector móvil (4), que es giratoria en pitch.
2 - Sistema de acuerdo con la reivindicación 1 que para transmitir el movimiento del conjunto actuador-sensor inclinométrico (10,14) hacia la montura giratoria en pitch (13) y la rótula giratoria en roll (17) incorpora dos juegos de engranajes (11,15), de tal forma que para el juego de engranajes (11), la relación de transmisión entre el engranaje emplazado en el eje del motor de pitch (10) y el emplazado en el eje de pitch (12) es una relación 2:1; para el juego de engranajes (15), el engranaje emplazado en el eje del motor de roll (14) y el engranaje del eje de rotación en roll (16) mantienen una relación de transmisión 1:1.
3 - Sistema de acuerdo con la reivindicación 2 dónde la relación de transmisión de movimiento del conjunto actuador-sensor inclinométrico (10,14) hacia la montura giratoria en pitch (13) y la rótula giratoria en roll (17) se realiza mediante los sistemas electrónicos de control.
4 - Sistema de acuerdo con cualquiera de las reivindicaciones 2-3 donde cada eje (12,16) comprende un módulo inclinométrico formado por un sensor de actitud, un actuador/motor y un sistema electrónico de control, de tal forma que los módulos inclinométricos en pitch (10) y en roll (14) se mueven solidaria y respectivamente con la rótula giratoria (17) y el elemento fijo (18) en base a las ecuaciones angulares de diseño que calculan los ángulos de deflexión en pitch y en roll para mantener el apuntamiento del LIDAR en una dirección dada a lo largo del tiempo (dirección habitualmente cénit o nadir).
- Sistema de acuerdo con cualquiera de las reivindicaciones 1-4 donde el LIDAR
(1) está dispuesto horizontalmente respecto del eje de la plataforma móvil.
6 - Sistema de acuerdo con la reivindicación 5 que comprende un único deflector móvil (4).
7 - Sistema de acuerdo con cualquiera de las reivindicaciones 1-4 que comprende un LIDAR (1) dispuesto verticalmente.
8 - Sistema de acuerdo con la reivindicación 7 que comprende un deflector móvil (E2) y un subsistema óptico auxiliar.
9 - Sistema de acuerdo con la reivindicación 7 que comprende un deflector fijo (E1) y un deflector móvil (E2).
- Sistema de acuerdo con la reivindicación 8 donde el subsistema óptico auxiliar comprende un deflector fijo a 45° (22d) y un conjunto de elementos refractivos (22a, 22b, 22e).
11 - Sistema de acuerdo con cualquiera de las reivindicaciones 8-10 donde la focal de la lente (22e) es tal que la apertura del cono de emisión LIDAR emitido es aproximadamente la misma que la apertura del cono de sondeo LIDAR que se emite
(2).
12 - Sistema de acuerdo con las reivindicaciones 8-11 que comprende un colimador formado por dos primeras lentes (22a, 22b) de forma que entre unas segundas lentes (22b, 22e) y a su paso por el deflector fijo (22d), se obtiene un haz óptico colimado.
Patentes similares o relacionadas:
CARRIL PARA VEHÍCULOS PESADOS CON MEDIOS DE COMPROBACIÓN DE VEHÍCULO VACÍO, del 18 de Junio de 2020, de INFORMATICA EL CORTE INGLES, S.A.: 1. Carril para vehículos pesados con medios de comprobación de vehículo vacío, caracterizado porque está constituido a partir de un carril para paso de vehículos […]
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Dispositivo para controlar un relleno de separación, vehículo que comprende dicho dispositivo y método de control asociado, del 29 de Abril de 2020, de ALSTOM Transport Technologies: Un dispositivo para controlar un relleno de separación con el que se va a equipar una puerta de un vehículo ferroviario , dicho dispositivo de control comprende: […]
Procedimiento y sistema para evitar mal funcionamiento en llamadas, del 21 de Agosto de 2019, de Guangdong OPPO Mobile Telecommunications Corp., Ltd: Un procedimiento para evitar errores de operación en llamadas por un teléfono móvil, mediante el cual el procedimiento comprende las etapas de: detectar continuamente […]
Método y aparato para la formación de imágenes fantasma computacional, del 24 de Julio de 2019, de BAE SYSTEMS PLC: Un aparato de formación de imágenes fantasma computacional que comprende una primera fuente de radiación electromagnética y un sistema […]
Procedimiento de adquisición de las coordenadas de un punto de activación de un proyectil y control de disparo que implementa un tal procedimiento, del 20 de Diciembre de 2017, de NEXTER SYSTEMS: Procedimiento de adquisición de las coordenadas de un punto de activación (P) de un proyectil o de una ráfaga de proyectiles en trayectoria y […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]
Técnicas para posicionar un vehículo, del 8 de Noviembre de 2017, de KONECRANES GLOBAL CORPORATION: Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya […]