Procedimiento para separar un objeto.
Procedimiento para separar un objeto (1), en particular una botella,
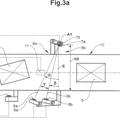
de una secuencia (2) de objetos mediante un eyector (4) de una cinta transportadora (9), vigilándose una señal de medición para determinar un primer contacto entre el eyector y el objeto a separar y realizando el eyector una carrera nominal (10) partiendo del primer contacto.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E13185154.
Solicitante: KRONES AG.
Nacionalidad solicitante: Alemania.
Dirección: BÖHMERWALDSTRASSE 5 93073 NEUTRAUBLING ALEMANIA.
Inventor/es: GUT,THORSTEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/36 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Aparatos clasificadores caracterizados por los medios que utilizan en vista de la distribución.
- B65G47/82 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Elementos de movimiento rotativo o alternativo que actúan directamente sobre los objetos o materiales, p. ej. empujadores, rastrillos, palas.
PDF original: ES-2546680_T3.pdf
Fragmento de la descripción:
Procedimiento para separar un objeto La invención se refiere a un procedimiento para separar un objeto, en particular una botella, de una secuencia de objetos mediante un eyector de una cinta transportadora.
Tal como es conocido, productos defectuosos se pueden separar de un flujo de productos transportado sobre una cinta transportadora mediante denominados eyectores en la dirección de al menos una banda de eliminación tal como, por ejemplo, se describe en el documento DE 10 2010 031298 A1. Por consiguiente, mediante una vigilancia de un parámetro dependiente de la carga del eyector se puede comprobar la eliminación con éxito de un objeto sobre una banda de eliminación.
No obstante, por motivos de manipulación, los objetos, por ejemplo, botellas, se alimentan con una holgura lateral a barandillas de guiado en el lado de la entrada o similares de modo que los objetos también tienen un desplazamiento lateral diferente en el eyector que en el caso de sistemas de eliminación convencionales, por ejemplo, puede ascender a 10 mm. Dado que las carreras de eliminación nominales de los eyectores se pueden situar en un intervalo de 5 a 15 mm, puede ocurrir que se realice una carrera insuficiente para la eliminación a la banda de eliminación deseada según el desplazamiento lateral del objeto a separar o que se realice una carrera demasiado grande y, por ejemplo, el objeto se presiona contra una barandilla de delimitación y, a este respecto, se daña. Igualmente es posible un enganche de objetos individuales en la zona del sistema de eliminación. Por tanto, existe el problema básico de garantizar una separación fiable y protectora con carreras de eliminación nominales lo más pequeñas posibles a pesar del desplazamiento lateral diferente.
Para ello, por ejemplo, el documento WO 99/20551 A1 propone prever aguas arriba de un eyector una disposición de barreras fotoeléctricas de manera transversal a la dirección de transporte de los objetos a eliminar. Sin embargo, esto provoca un despliegue considerable de aparatos y no garantiza una detección fiable del respectivo desplazamiento lateral en el caso de objetos que están situados muy próximos unos a otros.
Por tanto, existe la necesidad de un procedimiento para separar un objeto de una secuencia de objetos transportados en el que se puedan eliminar o al menos mitigar los problemas mencionados anteriormente con un despliegue bajo de aparatos, ahorrando espacio y con una alta seguridad funcional.
El objetivo planteado se consigue con un procedimiento de acuerdo con la reivindicación 1. Por consiguiente, se vigila una señal de medición para determinar un primer contacto entre el eyector y el objeto a separar. En particular, el objeto es una botella, un recipiente, un embalaje o un bulto. Además, el eyector realiza una carrera nominal partiendo del primer contacto. Por el primer contacto se debe entender a este respecto el establecimiento del contacto entre el objeto y un empujador previsto en el eyector, una placa eyectora o similares. Se entiende que el primer contacto de acuerdo con la invención se establece durante un avance del eyector en la dirección hacia el objeto.
Por tanto, el objeto se puede empujar de forma controlada en la dirección de una determinada banda de eliminación o similares. Dicho de otro modo, para el proceso de eliminación no se tiene que tener en cuenta una carrera simulada del eyector, esto es, una carrera que realiza el eyector antes de que se establezca el primer contacto con el objeto.
La señal de medición de acuerdo con la invención se toma en la zona del eyector. El contacto entre el empujador y el objeto se puede realizar, por ejemplo, mediante una vigilancia de uno o varios parámetros característicos del empujador. También serían concebibles sensores de presión adicionales en el empujador o en una placa eyectora prevista en el empujador o similares. Señales de medición de sensores de presión de este tipo se pueden tomar en la zona del eyector y conducen a que no sean necesarias barreras fotoeléctricas o similares para medir un desplazamiento lateral de los objetos entrantes.
Preferiblemente se determina individualmente para el objeto una carrera global para separar el objeto partiendo de una posición de descanso del eyector para hacer pasar la secuencia de objetos. Por tanto, cada objeto se puede empujar mediante la misma carrera nominal sobre una banda de eliminación o similares independientemente de su desplazamiento lateral.
Preferiblemente, la señal de medición se registra periódicamente al menos dentro de una carrera simulada del eyector en la dirección hacia el objeto. De este modo, el primer contacto se puede detectar automáticamente con fiabilidad y con una rapidez suficiente.
Preferiblemente, el primer contacto se determina con un avance continuo del eyector. De este modo, una carga del eyector por una resistencia opuesta por el objeto a separar se puede identificar de manera especialmente fiable y se puede asociar con el primer contacto. Además se pueden minimizar errores debido a una holgura de accionamiento.
Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, siendo la señal de medición un valor real del eyector que es característico de la posición o del movimiento de un empujador previsto en el eyector o de
una resistencia opuesta al empujador.
Por ejemplo, la posición del empujador se podría medir por un transductor de posición previsto de forma interna o externa en el eyector. Por ejemplo, el movimiento del empujador se podría vigilar mediante la medición de la velocidad y/o de la aceleración del empujador mediante transductores de posición, sensores de aceleración o similares. Una resistencia opuesta al empujador se refleja, por ejemplo, en pares de accionamiento, la absorción de corriente del accionamiento previsto en el eyector o similares. Asimismo, un sensor de presión adicional en la zona del empujador o en una placa eyectora prevista en el empujador podría proporcionar una señal de medición que es una medida de la resistencia opuesta al empujador.
Preferiblemente, el desarrollo del valor real se compara con el desarrollo de un valor deseado. Los desarrollos del valor real y del valor deseado se deben entender en particular en el sentido de diagramas de posición-tiempo y/o tablas de posición-tiempo. Mediante una comparación de este tipo se puede determinar una diferencia en función de la carga entre valores reales y valores deseados. Dado que el establecimiento del contacto entre el empujador y el objeto implica un cambio de estado en función de la carga para el despliegue del empujador, se puede detectar un cambio de estado de este tipo a partir de la comparación del desarrollo temporal del valor real con el desarrollo temporal del valor deseado, que es sinónimo del establecimiento del contacto.
Preferiblemente, el desarrollo del valor deseado se establece previamente en función de una dimensión y/o la masa del objeto. El desarrollo del valor deseado se debe entender en particular en el sentido de un diagrama de posicióntiempo y/o una tabla de posición-tiempo. Esto permite una adaptación típica de variedades del procedimiento. Por ejemplo, un desarrollo esperado del valor deseado se puede adaptar a un determinado tipo de botella. Por ejemplo, esto podría ser una determinada zona del avance del eyector en el que se espera un desarrollo característico de la señal de medición. Igualmente serían concebibles determinados cambios en función de la carga de la señal de medición en caso de objetos con un peso diferente. Por ejemplo, el desarrollo del valor deseado podría comprender un cambio característico de la absorción nominal de corriente del accionamiento del eyector durante una carrera simulada y durante una expulsión del objeto.
Preferiblemente se calculan valores diferenciales a partir de valores reales y valores deseados que se corresponden temporalmente. Dicho de otro modo, la posición real del empujador durante el avance se compara con una curva de posiciones deseadas y/o una tabla de posiciones deseadas. Esto permite una evaluación especialmente sencilla de los resultados de comparación.
Preferiblemente, los valores diferenciales se comparan con al menos un umbral que es característico del establecimiento del primer contacto entre el empujador y el objeto. Al alcanzar o superar un umbral, se puede desencadenar de manera sencilla y fiable el inicio de la carrera nominal.
Preferiblemente se calcula a partir de la señal de medición un error de arrastre entre una posición deseada del empujador y una posición real del empujador. Por el error de arrastre se debe entender un arrastrado debido a la técnica de regulación de la posición real con respecto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para separar un objeto (1) , en particular una botella, de una secuencia (2) de objetos mediante un eyector (4) de una cinta transportadora (9) , vigilándose una señal de medición para determinar un primer contacto entre el eyector y el objeto a separar y realizando el eyector una carrera nominal (10) partiendo del primer contacto.
2. Procedimiento de acuerdo con la reivindicación 1, determinándose individualmente para el objeto (1) una carrera global (18) para separar el objeto (1) partiendo de una posición de reposo (13) del eyector (4) para hacer pasar la secuencia (2) de objetos.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, registrándose periódicamente la señal de medición al menos dentro de una carrera simulada (15) del eyector (4) en la dirección hacia el objeto (1) .
4. Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, determinándose el primer contacto con un avance continuo del eyector (4) .
5. Procedimiento de acuerdo con una de las reivindicaciones anteriores, siendo la señal de medición un valor real
(21) del eyector (4) que es característico de la posición o del movimiento de un empujador (5) previsto en el eyector
6. Procedimiento de acuerdo con la reivindicación 5, comparándose el desarrollo del valor real (21) con el desarrollo de un valor deseado (22) . 7. Procedimiento de acuerdo con la reivindicación 6, estableciéndose previamente el desarrollo del valor deseado (22) en función de una dimensión y/o la masa del objeto (1) . 8. Procedimiento de acuerdo con la reivindicación 6 ó 7, calculándose valores diferenciales (23) a partir de valores reales (21) y valores deseados (22) que se corresponden temporalmente. 9. Procedimiento de acuerdo con la reivindicación 8, comparándose los valores diferenciales (23) con al menos un umbral (24) que es característico del establecimiento del primer contacto entre el empujador (5) y el objeto (1) . 10. Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, calculándose a partir de la señal de medición un error de arrastre entre una posición nominal del eyector y una posición real del eyector. 11. Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, siendo el objeto (1) una botella de vidrio o una botella de plástico rellena. 12. Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, accionándose el eyector (4) por un motor lineal (6) regulado con respecto a la posición. 13. Procedimiento de acuerdo con al menos una de las reivindicaciones anteriores, evaluándose de forma periódicamente repetida la señal de medición y desencadenándose el inicio de la carrera nominal (10) dentro de, como máximo, 2 ms una vez determinado el primer contacto. o de una resistencia opuesta al empujador.
Patentes similares o relacionadas:
Dispositivo orientador, del 28 de Abril de 2020, de SANCHEZ PAREDES, Hugo Marino: 1. Dispositivo orientador, para colocar en vertical un objeto con una muesca o abertura (6'), caracterizado porque comprende un soporte : configurado para colocarse […]
Método y dispositivo para agrupar piezas en bruto de productos, del 4 de Diciembre de 2019, de Texa AG: Método para agrupar productos alargados configurados como latas, tubos o cartuchos, preferiblemente, vacíos, en donde los productos se suministran con una instalación […]
Dispositivo de relevo, del 13 de Noviembre de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de relevo que comprenda: una primera sección de transporte que transporta una pluralidad de objetos a transportar, continuamente […]
Disco de soporte y sistema transportador, del 5 de Noviembre de 2019, de FLEXLINK COMPONENTS AB: Disco de soporte para un sistema transportador, que comprende un cuerpo inferior no circular que tiene una sección frontal que comprende una forma […]
 Procedimiento y dispositivo para la detección y la separación de artículos, del 31 de Octubre de 2019, de FERAG AG: Procedimiento para la deteccion y la separacion dirigida de articulos individuales que se transportan unos detras de otros sobre un elemento […]
Procedimiento y dispositivo para la detección y la separación de artículos, del 31 de Octubre de 2019, de FERAG AG: Procedimiento para la deteccion y la separacion dirigida de articulos individuales que se transportan unos detras de otros sobre un elemento […]
Dispositivo y procedimiento para transferir recipientes a una máquina procesadora, del 1 de Noviembre de 2017, de Groninger GmbH&Co. KG: Sistema con una máquina procesadora para el tratamiento cíclico de un grupo de recipientes , y un dispositivo para transferir recipientes a […]
Dispositivo y procedimiento para descargar porciones de embutido, del 3 de Mayo de 2017, de ALBERT HANDTMANN MASCHINENFABRIK GMBH & CO. KG: Dispositivo para descargar porciones de embutido con un primer equipo de transporte para transportar las porciones de embutido en […]
Dispositivo de identificación y acumulación de artículos, del 2 de Noviembre de 2016, de Lusia Soluzioni Meccaniche S.r.l: Un dispositivo de identificación y acumulación de artículos (A) provistos de un código de identificación, que comprende: un bastidor ; […]