Dispositivo para inspección de tuberías y método para utilizar el mismo.
Un dispositivo (10), que comprende:
- una parte (12) de sensor,
en donde la parte de sensor comprende una pluralidad de dispositivos de detección;
- una parte (14) de chasís conectada a la parte (12) de sensor, en donde la parte (14) de chasís comprende una primera pista (18) y una segunda pista (20), dicha primera pista y dicha segunda pista tienen, cada una, un ancho predeterminado, por lo que dicha primera pista (18) se posiciona adyacente a dicha segunda pista (20) y paralela a la misma caracterizado porque
el ancho colectivo de dicha primera pista (18) y de dicha segunda pista (20) cubre sustancialmente el ancho completo de dicha parte (14) de chasís de tal manera que la primera y segunda pistas forman colectivamente sustancialmente la estructura frontal, inferior y posterior completa de la parte de chasís.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2009/063129.
Solicitante: Redzone Robotics, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 484 West Seventh Avenue West Homestead, Pennsylvania 15210 ESTADOS UNIDOS DE AMERICA.
Inventor/es: ATWOOD,CHRISTOPHER C, JUCHNIEWICZ,RICHARD P, KRATZER,ERIC, SLIFKO,ADAM, JOHNS,PHILIP.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61F13/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61F SUSPENSIONES DE VEHICULOS FERROVIARIOS, p. ej. CHASIS, BOGIES O DISPOSICIONES DE EJES DE RUEDAS; VEHICULOS FERROVIARIOS UTILIZABLES SOBRE VIAS DE DISTINTA ANCHURA; PREVENCION DE DESCARRILAMIENTOS DE VEHÍCULOS FERROVIARIOS; GUARDARRUEDAS, ELIMINADORES DE OBSTACULOS O DISPOSITIVOS SIMILARES PARA VEHÍCULOS FERROVIARIOS (para vehículos en general B60; ejes o ruedas B60B; neumáticos para vehículos B60C). › Vehículos ferroviarios caracterizados por sistemas de ruedas no previstas en otro lugar.
- B62D55/12 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › Disposición, emplazamiento o adaptación de coronas dentadas para el enganche de eslabones de cadena.
- B62D55/24 B62D 55/00 […] › de tipo de flexibilidad total, p. ej. de correas de caucho.
PDF original: ES-2543226_T3.pdf
Fragmento de la descripción:
detallada
Se entiende que por lo menos algunas de las figuras y descripciones de la invención que se han simplificado ¡lustran elementos que son relevantes para una clara comprensión de la invención, aunque se eliminan, para propósitos de claridad, otros elementos que aquellos expertos comunes en la técnica apreciarán también pueden comprender una parte de la Invención. Sin embargo, en razón a que dichos elementos son bien conocidos en la técnica, y en razón a que no facilitan una mejor comprensión de la Invención, no se proporciona aquí una descripción de dichos elementos.
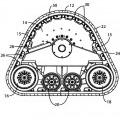
La FIGURA 5 ¡lustra diversas realizaciones de un dispositivo 10. Para propósitos de claridad, se muestra una vista parcial en explosión del dispositivo 10 en la FIGURA 5. Como se explica en mayor detalle aquí adelante, el dispositivo se puede utilizar para navegar, explorar, mapear, etc. diversos ambientes (por ejemplo, tuberías de agua, tuberías de alcantarillado, etc ). Para propósitos de simplicidad, el dispositivo 10 se describirá en el contexto de un robot 10 móvil automático utilizado para Inspección de tuberías (por ejemplo, una tubería de alcantarillado). Sin embargo, se apreciará que el dispositivo 10 se puede Incorporar en cualquier serle de diferentes tipos de plataformas de Inspección, que Incluyen dispositivos no automáticos y plataformas de Inspección tele-operadas, y se pueden utilizar en una pluralidad de otros ambientes.
El robot 10 móvil automático Incluye una parte 12 de sensor y una parte 14 de chasis. La parte 12 de sensor se conecta eléctrica y mecánicamente a la parte 14 de chasis. Como se muestra en la FIGURA 5, el robot 10 móvil automático también puede Incluir una parte 16 de elevación que se poslclona entre la parte 12 de sensor y la parte 14 de chasis, y se conecta eléctrica y mecánicamente entre sí. La parte 16 de elevación funciona para aumentar la distancia de la parte 12 de sensor que se sitúa por encima la parte Inferior de la tubería, y se puede utilizar en aplicaciones de tubería grandes para proporcionar un punto de ventaja deseado para diversos dispositivos de detección de la parte 12 de sensor. De acuerdo con otras realizaciones, el robot 10 móvil automático no Incluye la parte 16 de elevación descrita anteriormente. Los aspectos del robot 10 móvil automático se pueden ¡mplementar mediante un dispositivo de ordenador y/o un programa computarlzado almacenado en un medio legible por ordenador. El medio legible por ordenador puede comprender un disco, un dispositivo, y/o una señal propagada.
De acuerdo con diversas realizaciones, la parte 12 de sensor Incluye una pluralidad de dispositivos de detección (por ejemplo, una cámara, un dispositivo radar, un dispositivo sonar, un dispositivo Infrarrojo, un dispositivo láser, etc.) para detectar las condiciones dentro del ambiente, un dispositivo de ordenador conectado en forma comunicada a los dispositivos de detección y que tienen un procesador para procesar Información en bruto capturada por los dispositivos de detección, un dispositivo de memoria conectado en forma comunicada al dispositivo de ordenador para almacenar la Información en bruto y/o procesada, y el circuito de control se conecta en forma comunicada al dispositivo de ordenador para controlar diversos componentes del robot 10 móvil automático. El dispositivo de memoria también se puede utilizar para almacenar el software que se utiliza por el robot 10 móvil automático para navegar, explorar, mapear, etc. el entorno.
Como se muestra en la FIGURA 5, la parte 14 de chasis Incluye una primera pista 18, y una segunda pista 20. De acuerdo con diversas realizaciones, la primera pista 18 es Idéntica a la segunda pista 20. La primera y segunda pistas 18, 20 se pueden fabricar de cualquier material adecuado o combinación de materiales, y se pueden fabricar como campanas. De
acuerdo con diversas realizaciones, la primera y segunda pistas 18, 20, se fabrican de polímeros y cauchos sintéticos elásticos unidos, y adicionalmente pueden incluir acero u otros elementos puestos dentro o sobre los cauchos y polímeros para aumentar su resistencia. La primera y segunda pistas 18, 20 cada una define una pluralidad de aberturas 22 a través de estas. Las aberturas 22 pueden tener cualquier forma y tamaño adecuados, y se pueden disponer en cualquier configuración adecuada. Aunque solo se muestran dos filas de aberturas 22 en la FIGURA 5 para cada pista, se entiende que las aberturas 22 se pueden disponer en cualquier serie de filas. La primera pista 18 se posiciona adyacente a la segunda pista 20. Colectivamente, la primera y segunda pistas 18, 20 definen un espacio entre estas, y cubren sustancialmente el "ancho" completo de la parte 14 de chasis. Por ejemplo, de acuerdo con diversas realizaciones, el ancho de la parte de chasis es aproximadamente 100 milímetros, y la primera y segunda pistas 18, 20 cubren colectivamente aproximadamente 92 de los 100 milímetros.
La primera pista 18 define una primera superficie 18a y una segunda superficie 18b (no mostrada) opuesta a la primera superficie 18a. De acuerdo con diversas realizaciones, la primera superficie 18a es la superficie que entra en contacto con una superficie interna de una tubería de alcantarillado cuando el robot 10 móvil automático se utiliza para una aplicación de tubería de alcantarillado. De acuerdo con diversas realizaciones, la primera superficie 18a de la primera pista 18 es sustancialmente lisa. De forma similar, la segunda pista 20 define una primera superficie 20a y una segunda superficie 20b (no mostrada) opuesta a la primera superficie 20a. De acuerdo con diversas realizaciones, la primera superficie 20a es la superficie que entra en contacto con una superficie interna de una tubería de alcantarillado cuando el robot 10 móvil automático se utiliza para una aplicación de tubería de alcantarillado. De acuerdo con diversas realizaciones, la primera superficie 20a de la primera pista 20 es sustancialmente lisa. Las primeras superficies 18a, 20a respectivas de la primera y segunda pistas 18, 20 tienen un coeficiente estático de fricción relativamente alto. Por ejemplo, de acuerdo con diversas realizaciones, el coeficiente estático de fricción de las primeras superficies 18a, 20a respectivas es aproximadamente 1.0. En general, el coeficiente estático de fricción de las primeras pistas 18a, 20a respectivas es aproximadamente 0.8 o más, lo que permite buena adhesión entre las pistas 18, 20 y la superficie interna de la tubería de alcantarillado.
De acuerdo con diversas realizaciones, las segundas superficies 18b, 20b respectivas de la primera y segunda pistas 18, 20 también son sustancialmente lisas. Para dichas realizaciones, las segundas superficies 18b, 20b respectivas pueden tener un coeficiente estático de fricción que es idéntico a aquel de las primeras superficies 18a, 20a respectivas. Para realizaciones en donde las primeras superficies 18a, 20a respectivas y las segundas superficies 18b, 20b respectivas de la primera y segunda pistas 18, 20 son sustancialmente lisas, cuando las primeras superficies respectivas 18a, 20a se desgastan mucho, la primera y segunda pistas 18, 20 se pueden retirar y girar (por ejemplo, la primera pista 18 tienen lugar de la segunda pista 20, y la segunda pista 20 tiene lugar de la primera pista 18). Al tomar esta acción, se ponen en contacto diferentes bordes de la primera y segunda pistas 18,20 con la superficie interna de la tubería de alcantarillado. Al cambiar con cuál ensamble de accionamiento se utilizan la primera y segunda pistas 18, 20, se dobla efectivamente la vida útil de la primera y segunda pistas 18, 20.
La primera y segunda pistas 18,20 se pueden denominar como pistas amplias/de cubrimiento completo. Debido al ancho colectivo de la primera y segunda pistas 18, 20 con relación al ancho de la parte 14 de chasis, la primera y segunda pistas 18, 20 forman colectivamente casi las superficies "frontal", "inferior" y "posterior" completas de la parte 14 de chasis. Sin embargo, cuando el robot 10 móvil automático encuentra cualesquiera desechos o retales dentro de la tubería de alcantarillado, las primeras superficies 18a, 20a de la primera y segunda pistas 18, 20 entran en contacto con los desechos o retales. En contraste a los robots con ruedas y robots de pista angosta, las pistas 18, 20 amplias/de cubrimiento completo se configuran para permitir que el robot 10 móvil automático escale sobre los desechos o retales y continúan desarrollando la inspección, navegación, mapeo, etc. Por ejemplo, en razón a que casi la superficie "frontal" completa del robot 10 móvil automático es una superficie de pista movible, cualesquiera desechos o retales de suficiente tamaño vertical encontrados en la tubería primero golpearán esta superficie de pista movible,... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo (10), que comprende:
una parte (12) de sensor, en donde la parte de sensor comprende una pluralidad de dispositivos de detección;
una parte (14) de chasis conectada a la parte (12) de sensor, en donde la parte (14) de chasis comprende una primera pista (18) y una segunda pista (20), dicha primera pista y dicha segunda pista tienen, cada una, un ancho predeterminado, por lo que dicha primera pista (18) se posiciona adyacente a dicha segunda pista (20) y
caracterizado porque
el ancho colectivo de dicha primera pista (18) y de dicha segunda pista (20) cubre sustancialmente el dicha parte (14) de chasis de tal manera que la primera y segunda pistas forman colectivamente estructura frontal, inferior y posterior completa de la parte de chasis.
2. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque la pluralidad detección comprende por lo menos uno de los siguientes:
- una cámara;
- un dispositivo radar;
- un dispositivo sonar;
- un dispositivo infrarrojo; y
- un dispositivo láser.
3. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque la primera pista (18) define una primera pluralidad de aberturas (22) a través de esta, y en que la segunda pista (20) define una segunda pluralidad de aberturas (22) a través de esta.
4. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque por lo menos una superficie de la primera pista (18) es sustancialmente lisa, y en que por lo menos una superficie de la segunda pista (20) es sustancialmente lisa.
5. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque la parte (14) de chasis comprende adicionalmente:
- un primer ensamble (24) de accionamiento, en donde el primer ensamble de accionamiento está en contacto con la primera pista (18); y
- un segundo ensamble (26) de accionamiento posicionado adyacente al primer ensamble (24) de accionamiento, en donde el segundo ensamble (26) de accionamiento está en contacto con la segunda pista (20).
6. Un dispositivo (10) de acuerdo con la reivindicación 5, caracterizado porque el primer ensamble (24) de accionamiento comprende:
- un motor (32);
- un tren de engranaje de reducción de velocidad conectado al motor; y
- una polea (34) de accionamiento conectada al tren de engranaje de reducción de velocidad.
7. Un dispositivo (10) de acuerdo con la reivindicación 6, caracterizado porque la polea (34) de accionamiento define una pluralidad de pernos (36).
8. Un dispositivo (10) de acuerdo con la reivindicación 6, caracterizado porque la polea (34) de accionamiento define por lo menos una ranura alrededor de una circunferencia de la polea de accionamiento.
9. Un dispositivo (10) de acuerdo con la reivindicación 8, caracterizado porque por lo menos una ranura se posiciona entre un primer perno definido por la polea (34) de accionamiento y un segundo perno definido por la polea de accionamiento.
paralela a la misma
ancho completo de sustancialmente la
de dispositivos de
10. Un dispositivo (10) de acuerdo con la reivindicación 7, caracterizado porque la pluralidad de pernos (36) se configuran para acoplarse con una pluralidad de aberturas (22) definidas por la primera pista (18).
11. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque comprende adicionalmente una parte de elevación (16) conectada a la parte (12) de sensor y la parte (14) de chasis.
12. Un dispositivo (10) de acuerdo con la reivindicación 1, caracterizado porque la parte (14) de chasis comprende:
- una correa (38) de sujeción;
- un ensamble (28) de cabrestante en contacto con la correa (38) de sujeción;
- un ensamble (59) de distribución en contacto con la correa (38) de sujeción;
- un ensamble de huso en contacto con la correa (38) de sujeción.
13. Un dispositivo (10) de acuerdo con la reivindicación 12, caracterizado porque el ensamble de cabrestante comprende:
- un motor (44) de accionamiento;
- un embrague (48); y
- un tambor (46) de eje de arrastre en contacto con la correa (38) de sujeción y acoplado al motor (44) de accionamiento por
medio del embrague (48).
14. Un dispositivo (10) de acuerdo con la reivindicación 12, caracterizado porque el ensamble (59) de distribución comprende:
- un Imán (56) codificador;
- un rodillo (71) en contacto con la correa (38) de sujeción y acoplado magnéticamente al imán (56) codificador; y
- un chip (72) codificador acoplado magnéticamente al imán (56) codificador.
15. Un dispositivo (10) de acuerdo con la reivindicación 12, caracterizado porque el ensamble de huso comprende:
- un motor (42) de accionamiento;
- un sistema (58) de nivel eólico en contacto con la correa (38) de sujeción; y
- un huso (40) de correa de sujeción en contacto con la correa (38) de sujeción y acoplado al motor (42) de accionamiento.
Patentes similares o relacionadas:
Segmento de cadena de banda de goma, del 1 de Julio de 2020, de DST Defence Service Tracks GmbH: Segmento de cadena de banda de goma que se puede unir por medio de equipos de unión en sus extremos con otros segmentos de cadena de banda de goma […]
 Orejetas para orugas continuas de caucho para vehículos de orugas, del 17 de Noviembre de 2015, de ATI INC.: Oruga flexible continua para extenderse alrededor de una pluralidad de ruedas alineadas en un vehículo o módulo de oruga , incluyendo la oruga una superficie […]
Orejetas para orugas continuas de caucho para vehículos de orugas, del 17 de Noviembre de 2015, de ATI INC.: Oruga flexible continua para extenderse alrededor de una pluralidad de ruedas alineadas en un vehículo o módulo de oruga , incluyendo la oruga una superficie […]
Banda de tracción, del 30 de Abril de 2014, de SOUCY INTERNATIONAL, INC.: Banda de tracción que comprende un cuerpo de banda dividido en una pluralidad de secciones de banda a lo largo de líneas divisorias que discurren […]
CORREA DE ORUGAS DEL TIPO DE BAJO RUIDO CON ELEMENTOS DE ACERO Y VEHICULO QUE EMPLEA DICHA CORREA DE ORUGAS., del 1 de Mayo de 2007, de TAKEUCHI MANUFACTURING CO., LTD.: Una correa de orugas sin fin de forma de anillo para su montaje sobre y alrededor de una rueda de orugas frontal y una rueda de orugas trasera de modo que […]
ORUGA ELASTICA., del 16 de Noviembre de 2006, de TAERYUK RUBBER BELT CO., LTD.: Oruga elástica, que comprende un cuerpo de oruga formado de un material elástico en una banda sinfín; una pluralidad de elementos de núcleo teniendo […]
CADENA SIN FIN PARA VEHICULOS TODOTERRENO DE ALTA VELOCIDAD., del 1 de Diciembre de 2005, de SOUCY INTERNATIONAL, INC.: Una cadena para uso en un vehículo de orugas hecha de un polímero, destinada a moverse en torno a una rueda de cadena de accionamiento, una pluralidad […]
VEHICULO TODO TERRENO PARA PERSONAS DISCAPACITADAS., del 1 de Mayo de 2005, de PALOMINO CONDES,FRANCISCO JAV. BENAVIDES NAVARRO,M. JOSE: 1. Vehículo todo terreno para personas discapacitadas, que está constituido por tres piezas y acoplables entre sí, - la primera pieza son las ruedas […]
CONJUNTO DE REPARACIÓN IN SITU DE ORUGAS ELASTOMÉRICAS, del 16 de Diciembre de 2011, de SOUCY INTERNATIONAL, INC.: Conjunto de reparación in situ para reparar una oruga elastomérica dañada que tiene un cuerpo que define una superficie externa de acoplamiento […]