EQUIPO PARA LA CLASIFICACIÓN AUTOMÁTICA DE PIEZAS.
Equipo para clasificación automática de piezas, que comprende Una mesa de trabajo en la que se realizan determinadas operaciones sobre cada pieza a clasificar.
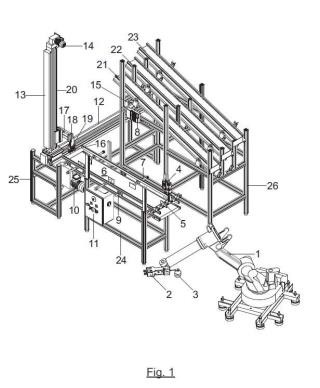
Equipo de identificación de piezas, una serie de estaciones (21, 22 y 23) receptoras de piezas clasificadas, un brazo manipulador (17, 18 y 19), encardado de transportar las piezas desde la mesa de trabajo (6) hasta las estaciones receptoras, y un brazo robot (1) encargado de transportar las piezas a clasificar desde una superficie de suministro de hasta la mesa de trabajo (6).
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331249.
Solicitante: UNIVERSIDAD DE LEON.
Nacionalidad solicitante: España.
Inventor/es: DOMINGUEZ GÓNZALEZ,MANUEL, FUERTES MARTINEZ,JUAN JOSÉ, PRADA MEDRANO,MIGUEL ÁNGEL, ALONSO CASTRO,SERAFIN, MORAN ALVAREZ,ANTONIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B07C5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D).
Fragmento de la descripción:
Campo de la invención
La presente invención se refiere a un equipo para la clasificación automática de piezas, especialmente concebido para la realización de prácticas de clasificación con finalidad didáctica. En particular, en el campo de la fabricación flexible, se puede controlar una línea de producción robotizada cuya finalidad es la clasificación de una serie de piezas en categorías mediante el reconocimiento de un código gráfico adosado a una de las superficies de cada pieza.
La presente invención ha sido especialmente concebida para satisfacer las necesidades formativas correspondientes a Automatización, Control y Supervisión en todos los niveles educativos, especialmente aquellos de grado superior (ciclos formativos de grado superior, ingenierías, licenciaturas, grados en ingeniería o másteres). Por lo tanto, la invención se refiere al campo de los dispositivos aplicables en el aprendizaje para las citadas técnicas.
Antecedentes de la invención
Actualmente, las prácticas de automatización en las enseñanzas de carácter tecnológico se realizan manejando dispositivos industriales tales como controladores, autómatas programables, sensores y actuadores (válvulas, cilindros), etc., utilizados de forma aislada; o con equipos reducidos a pequeña escala de tipo "cajas negras", es decir, con funcionamiento interno oculto para el usuario, que implementan estrategias básicas de automatización. En el primero de los casos, al trabajar con el dispositivo industrial de forma aislada, esto es, sin estar instalado en un proceso industrial, el alumno aprende solamente de forma parcial su funcionamiento ya que no es posible considerar las interacciones que se producen entre el dispositivo industrial y el proceso o entre dispositivos industriales entre sí. En el segundo de los casos, los equipos a pequeña escala solamente dan una aproximación, normalmente muy burda, de la realidad industrial, por lo que no alcanzan el nivel didáctico que en muchos casos sería deseable.
Descripción de la invención
La presente invención tiene por objeto resolver de forma plenamente satisfactoria la problemática señalada, mediante un equipo en el que se disponen los dispositivos industriales necesarios para constituir un verdadero proceso industrial robotizado de fabricación flexible que realiza la clasificación de piezas, en el que realizar prácticas de automatización con los diversos elementos que lo constituyen y con todo el conjunto. Con todo lo expuesto, las ventajas que aporta la presente invención a título meramente enunciativo y no limitativo son las siguientes:
Es un equipo que reproduce condiciones industriales reales de una línea de producción industrial, en la que se clasifican piezas, tales como perfiles de acero, lo que permite a los alumnos tener una idea real de condiciones industriales a las que se enfrentarán a lo largo de su carrera profesional.
En la presente invención se distribuye un diseño con una disposición que permite que interactúen los diferentes instrumentos.
El panel de control de la invención, constituido por una serie de carriles DIN, centraliza las fuentes de alimentación y los elementos de control del sistema, de manera que se puede observar el funcionamiento de estos elementos en un entorno que simula un proceso industrial real, lo que reafirma el carácter didáctico de la invención.
El equipo para la clasificación automática de piezas está constituido, de acuerdo con la invención, por:
- Una mesa de trabajo, en la que realizan determinadas operaciones sobre cada pieza a clasificar;
- Un equipo de identificación de piezas, situado a la entrada de la mesa de trabajo, a partir del que se originan las operaciones a realizar sobre cada pieza identificada;
- Una serie de estaciones receptoras de piezas procedentes de la mesa de trabajo, clasificadas en función de su identificación;
- Un brazo manipulador capaz de recoger las piezas de la mesa de trabajo, una vez realizadas sobre las mismas las operaciones asignadas, y depositarlas sobre las estaciones receptoras, separadas en función de la identificación de dichas piezas;
- Un brazo robot encargado de transportar las piezas a clasificar desde una
superficie de suministro de piezas hasta la mesa de trabajo, en coincidencia con el equipo de identificación, y desde las estaciones receptoras hasta la superficie de suministro.
En una posible aplicación dada a título de ejemplo no limitativo, el equipo de la invención, para prácticas de clasificación flexible robotizada de carácter didáctico, consiste en una célula electro-neumática de clasificación dotada de un brazo robot, cuya finalidad es la separación de perfiles huecos de acero en tres categorías mediante el reconocimiento de un código gráfico adosado a uno de los laterales de cada perfil de acero. Este código se adquiere en forma de imagen con una cámara y posteriormente se procesa para la obtención de dos números, que sumados y divididos entre 3 nos darán el grupo al que pertenece el perfil.
La mesa de trabajo puede consistir en una cinta transportadora lineal con una serie de elementos que permiten realizar tareas sobre los objetos que circulan por ella. La cinta dispondrá de sensores fotoeléctricos, que permiten determinar la posición de la pieza dentro de la cinta, y de cilindros neumáticos que colocan la pieza, dependiendo de su identificación. El equipo de identificación consiste en un sistema de visión que se encuentra al principio de la cinta y permite determinar el tipo de pieza depositado. Este sistema de visión se compone de una cámara y el software para el procesamiento de las imágenes que se encuentran en un ordenador de control.
La estaciones receptoras pueden consistir en rampas que se utilizan para almacenar las piezas que son depositadas por el brazo manipulador. La superficie de las rampas puede ser de acero inoxidable o similar, para proporcionar un grado de deslizamiento mayor. Las rampas estarán preferentemente situadas a diferentes alturas para favorecer la visualización de la caída de las piezas.
El brazo manipulador puede estar formado por una mesa de traslación lineal y por un brazo neumático que se encarga de trasladar el perfil de acero desde el final de la cinta transportadora hasta el carril de la rampa de almacenamiento que le corresponda. Para dotar de movimiento vertical y horizontal al brazo neumático se utilizan dos tornillos sin fin acoplados a dos motores.
El brazo robot está dotado en su extremo de una ventosa de succión y de una pinza neumática de apertura paralela y va montado en una base soporte. La función de la pinza neumática es coger los perfiles desde la superficie de suministro y situarlos en el inicio de la cinta transportadora, mientras que la función de la ventosa es recoger las
piezas o perfiles de los carriles de almacenamiento y situarlos en la mesa o superficie de suministro.
El equipo de la invención incluye además elementos Electro-neumáticos que controlan los cilindros de la cinta y que pueden estar formados por un bloque de diez electroválvulas que se encuentra anclado en uno de los perfiles de las estaciones receptoras, mientras que en el caso del brazo robot, se dispone de una válvula y eyector de vacío que se han instalado sobre el cuerpo del mismo. En este apartado también se debe mencionar la existencia de una electroválvula de apertura progresiva que controla el flujo global del aire de entrada. A la salida de esta válvula, se divide el circuito general en tres circuitos independientes, cada uno con su propia electroválvula de proceso, que permiten el corte o suministro de la presión para cada uno de los circuitos neumáticos (brazo manipulador, cinta y brazo robot).
El equipo incluirá también un panel de control y un ordenador de gestión. En el panel de control se encuentran los dispositivos que realizan el control del sistema. El principal elemento es un Autómata Programable (PLC) encargado de ejecutar la estrategia de control del sistema. También se dispone de una periferia descentralizada, en la que se encuentran los módulos de entrada/salidas y que se comunican con el PLC de control. Por último, también se deben mencionar la disposición de dos variadores de frecuencia para el control de los motores eléctricos encargados de accionamiento de la cinta transportadora y del brazo manipulador, y las fuentes para la alimentación de los componentes del panel. En el ordenador de gestión se ejecutan los programas necesarios para el correcto funcionamiento del dispositivo. Entre estos programas cabe destacar el encargado para el procesamiento de los códigos de cada pieza, y el encargado de realizar la comunicación y programación del PLC.
El...
Reivindicaciones:
1.- Equipo para clasificación automática de piezas, caracterizado por que comprende:
- Una mesa de trabajo en la que se realizan determinadas operaciones sobre cada pieza a clasificar;
- Un equipo de identificación de piezas, situado a la entrada de la mesa de trabajo, a partir del que se asigna las operaciones a realizar sobre cada pieza identificada;
- Una serie de estaciones receptoras de piezas procedentes de la mesa de trabajo, clasificadas en función de su identificación;
- Un brazo manipulador que dispone en su extremo de medios de sujeción de las piezas manipuladas y va montado en un conjunto de guías sobre las que puede desplazarse entre la mesa de trabajo y las estaciones receptoras; y
- Un brazo robot que dispone de medios de sujeción de las piezas a manipular, para su transporte hasta la mesa de trabajo y de medios de sujeción de las piezas situadas en las estaciones receptoras, una vez manipuladas.
2.- Equipo según reivindicación primera caracterizado por que la mesa de trabajo consiste en una cinta transportadora, a uno y otro lado de la cual van dispuestas herramientas de actuación sobre las piezas a clasificar.
3.- Equipo según reivindicaciones 1 y 2, caracterizado por que el equipo de identificación consiste en una cámara de visión que va dispuesta a la entrada de la cinta transportadora, para la detección y lectura de un código asignado a cada pieza.
4.- Equipo según reivindicación 1, caracterizado por que en el brazo robot los medios de sujeción de las piezas a manipular y de las piezas manipuladas consisten en una pinza paralela y de una ventosa de succión.
5.- Equipo según reivindicación 1, caracterizado por que las estaciones receptoras consisten en rampas dispuestas a diferente altura.
6.- Equipo según reivindicación2, caracterizado por que el brazo manipulador está
situado al final de la cinta transportadora y comprende guías verticales y horizontales perpendiculares a la dirección de desplazamiento de la cinta transportadora.
7.- Equipo según reivindicación 2, caracterizado por que las herramientas citadas son accionables mediante cilindros neumáticos, activables por sensores fotoeléctricos.
8.- Equipo según reivindicación 6, caracterizado por que los medios de sujeción del
brazo manipulador consisten en una pinza de apertura paralela, accionable a través de un conjunto de válvulas y va montada sobre dos brazos extensibles perpendiculares a través de una actuador de giro.
9.- Equipo según reivindicación 6, caracterizado por que las guías verticales y 10 horizontales están dotadas de sendos tornillos sin fin accionables por otros tantos motores.
Patentes similares o relacionadas:
Dispositivo de detección de objetos no conformes, del 8 de Abril de 2020, de COMMISSARIAT A L'ENERGIE ATOMIQUE ET AUX ENERGIES ALTERNATIVES: Dispositivo de detección de un objeto no conforme que comprende una bandeja , que tiene una porción rebajada vista desde arriba, sobre la que el objeto […]
SISTEMA Y MÉTODO DE SEPARACIÓN DE ACERO/MAGNETITA, PARA SOLUCIONAR DE MANERA INTEGRAL LA PROBLEMÁTICA ASOCIADA A LOS GRANDES ACOPIOS DE MINERAL DE MAGNETITA MEZCLADAS CON SCRAP DE BOLAS DE ACERO, PROVENIENTES DE PROCESOS DE BENEFICIO DE LA GRAN MINERÍA, del 19 de Marzo de 2020, de JOHN SUN: La presente invención se relaciona con un sistema y método de separación de acero/magnetita. El sistema comprende al menos buzón de alimentación , […]
SISTEMA DE DETECCIÓN DE INCHANCABLES PARA INSTALACIÓN EN BALDES DE MAQUINARIA PESADA, del 5 de Diciembre de 2019, de HIDALGO CARRASCO, Alejandro: Sistema para la detección de material inchancable que comprende uno o más transductores dispuestos en los baldes de maquinarias pesadas, cuales se […]
Sistema para distribución, empaquetado automático y devolución de productos editoriales, del 20 de Noviembre de 2019, de Klotzner, Stefan: Sistema para la distribución, empaquetado automático y devolución de productos editoriales que comprende: - un módulo de entrada ; - una báscula; […]
Procedimiento y dispositivo para el reciclaje de desechos de metal, del 11 de Septiembre de 2019, de Hydro Aluminium Rolled Products GmbH: Procedimiento para el reciclaje de desechos de metal, en particular desechos de aluminio, - en el que una cantidad de desecho de metal , en particular desecho de aluminio, […]
 Instalación de mecanizado y procedimiento asociado, del 31 de Julio de 2019, de Centre Technique des Industries Mécaniques et du Décolletage: Instalación de mecanizado, que comprende:
- una máquina herramienta con control digital,
- una unidad de alimentación […]
Instalación de mecanizado y procedimiento asociado, del 31 de Julio de 2019, de Centre Technique des Industries Mécaniques et du Décolletage: Instalación de mecanizado, que comprende:
- una máquina herramienta con control digital,
- una unidad de alimentación […]
Máquina de clasificación separativa de las materias en los residuos de una tarjeta chip, con destrucción de los elementos confidenciales, del 19 de Junio de 2019, de ADIMAS: Máquina de clasificación separativa de los residuos de una tarjeta chip, que comprende: - un módulo de corte apto para recortar al menos un elemento […]
Dispositivo para clasificar objetos, del 5 de Noviembre de 2018, de SYSTEM S.P.A.: Dispositivo para clasificar objetos transportados mediante una línea de transporte, que comprende: - una porción de línea de transporte en la cual son […]