SISTEMA DE CONTROL DE AERONAVES NO TRIPULADAS DE ALA ROTATORIA PARA ATERRIZAJE VERTICAL EN SUPERFICIES MÓVILES MEDIANTE PRE-ALIMENTACION DE FUERZAS EN EL SISTEMA DE CONTROL.
Mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil,
consistente en la adición de un sistema de control basado en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección-, obtenida de los citados sensores, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control, que se adelantan a las perturbaciones que se producirán en la posición de la aeronave como consecuencia de los cambios en la tensión del cable.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201232073.
Solicitante: UNIVERSIDAD PABLO DE OLAVIDE.
Nacionalidad solicitante: España.
Inventor/es: OLLERO BATURONE,ANIBAL, DE LOS SANTOS TRIGO,Silvia, ALARCÓN ROMERO,Francisco, BEJAR DOMINGUEZ,Manuel, SANTAMARIA RUBIO,Daniel, VIGURIA JIMENEZ,Luis Antidio, ALBO SANCHEZ-BEDOYA,Carlos, ANDERSON BELL SEILER,Allan, GIL MONTAÑO,Pablo, KONDAK,Konstantin, SANDINO VELÁSQUEZ,Luis Alberto, JIMÉNEZ BELLIDO,Antonio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C39/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 39/00 Aeronaves no previstas en otro lugar. › caracterizadas por un uso especial.
- G05D1/10 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo en las tres dimensiones simultáneamente (G05D 1/12 tiene prioridad).
Fragmento de la descripción:
Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control.
OBJETO DE LA INVENCION
La invención consiste en una mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil.
El sector de la técnica a que se destina la presente invención es el aeroespacial, o para dispositivos de ayuda al aterrizaje
ANTECEDENTES EN EL ESTADO DE LA TECNICA
La operación de aeronaves de despegue y aterrizaje vertical desde buques presenta diversas características que la convierten en una maniobra no exenta de dificultades. En el caso de condiciones atmosféricas o de mar desfavorables, el problema se agrava debido a las grandes perturbaciones que pueden producirse en la posición y actitud tanto de la aeronave como de la plataforma de aterrizaje.
Actualmente se utilizan diversas técnicas para incrementar la seguridad de dichas maniobras en aeronaves tripuladas. Una solución que ha demostrado ser efectiva es la utilización de un cable que une la aeronave con la plataforma de aterrizaje (US3801050, US2453851). De entre estos métodos basados en cable, cabe destacar el sistema Beartrap utilizado por la marina canadiense y RAST empleado por el ejército estadounidense (US3303807). Ambos se basan en mantener una tensión constante en el cable que une el helicóptero con la plataforma mediante medios hidráulicos. La tensión constante en el cable incrementa la estabilidad del sistema plataforma- cable-helicóptero ante posibles perturbaciones inducidas por agentes externos -típicamente meteorológicos-, facilitando la labor del piloto durante el aterrizaje.
Otros sistemas (JP 5330493 A 19931214), además de mantener la tensión constante en el cable, también realizan mediciones del ángulo que forma el cable con la plataforma y la aeronave. El sistema en cuestión consta de un controlador cuyo objetivo es mantener el cable perpendicular a la aeronave y la plataforma para así conseguir que la misma aterrice en el punto deseado. Este sistema, sin embargo, únicamente permite medir el efecto que posibles perturbaciones tengan sobre la posición de la aeronave una vez que ésta haya cambiado, no siendo posible prever dicho efecto a partir de la causa misma (una fuerza perturbadora). Además, en los sistemas mencionados, únicamente se realiza el control del ángulo que forma el cable con la aeronave, no utilizándose las medidas de ángulo para incrementar la precisión del posicionamiento relativo de la misma con respecto a la plataforma de aterrizaje.
Otros métodos empleados para facilitar la maniobra consisten en estabilizar la plataforma de aterrizaje, de modo que su posición y actitud no se vea afectada por el movimiento del buque. Esto se consigue situando la superficie de aterrizaje sobre una plataforma de Stewart -una plataforma cuya posición y actitud es controlable mediante actuadores que permiten su movimiento en los 6 grados de libertad posibles-. En este sentido, cabe destacar los recientes trabajos de Cybaero orientados principalmente a las aeronaves no tripuladas, como la patente internacional WO 2009/091315 W1, y la tesis sobre el sistema MALLS: Mobile Automatic Launch and Landing Station for VTOL UAVs, Andreas Gising, Linkóping Universitet LITH-ISY-EX-08/4190SE.
EXPLICACIÓN DE LA INVENCIÓN
La invención consiste en una mejora del sistema de control para el aterrizaje de una aeronave VTOL no tripulada sobre una plataforma móvil. Partiendo del método mencionado en el apartado anterior consistente en el despliegue de un cable entre la aeronave y la plataforma, la mejora se basa en la adición de un sistema de control consistente en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave, y un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección- obtenida de los sensores mencionados, además de las consignas de control generadas por el controlador de la aeronave. El módulo de control objeto de la invención calcula, a partir de la tensión en el cable, correcciones a introducir en
las consignas de control. Dichas correcciones permiten adelantarse a las perturbaciones que inmediatamente se producirán en la posición de la aeronave como consecuencia de los cambios en la tensión del cable. Al igual que en los métodos mencionados en el estudio del estado de la técnica, el cable se recoge conforme la aeronave se acerca a la plataforma, no siendo dicho 5 mecanismo de recogida objeto de esta invención.
Adicionalmente, la información sobre la orientación del cable permite incrementar la precisión de la estimación de la posición de la aeronave con relación a la plataforma de aterrizaje. En efecto, si el cable es suficientemente corto y su tensión elevada, podemos suponer que toma la forma de una línea recta que une la aeronave con la plataforma. En combinación con otros sensores de la 10 aeronave, como pudiera ser un altímetro de precisión, y los sensores inerciales que determinan la actitud de la misma, la posición relativa de ésta puede ser estimada a partir de la altura de la misma y el ángulo que forma el cable con la vertical. El valor de la posición relativa obtenido por este método puede entonces utilizarse para incrementar la precisión de la estimación de posición proporcionada por el resto de sensores de la aeronave. Cabe destacar la diferencia de este 15 método con respecto a los descritos en el estado de la técnica, en los cuales la información proporcionada por los sensores de ángulos únicamente se emplea como entrada de un bucle de control cuyo objetivo es mantener el cable perpendicular a la aeronave. En la solución propuesta, sin embargo, las medidas de ángulos se emplean para incrementar la precisión de la estimación de la posición de la aeronave, siendo a su vez dicha estimación empleada para el control en posición 20 de la aeronave.
BREVE DESCRIPCIÓN DE LAS FIGURAS
Figura 1. Vista general de la aeronave y plataforma en configuración de aterrizaje.
Se muestra un esquema de la aeronave y la plataforma durante la maniobra de aterrizaje. Se encuentra también representado el cable que une ambos elementos durante el aterrizaje.
Figura 2. Esquema del sistema de sensores que permite medir el ángulo y tensión del cable.
Se muestra un esquema del sistema que permite medir la tensión del cable que une la aeronave con la plataforma de aterrizaje, así como los ángulos que forma dicho cable con la aeronave.
Figura 3. Diagrama de bloques del sistema de control.
Se muestra un diagrama de bloques del sistema de control automático de la aeronave. En el 30 diagrama se resaltan los módulos que forman parte de la invención y que mejoran el comportamiento de los sistemas de control automático actuales.
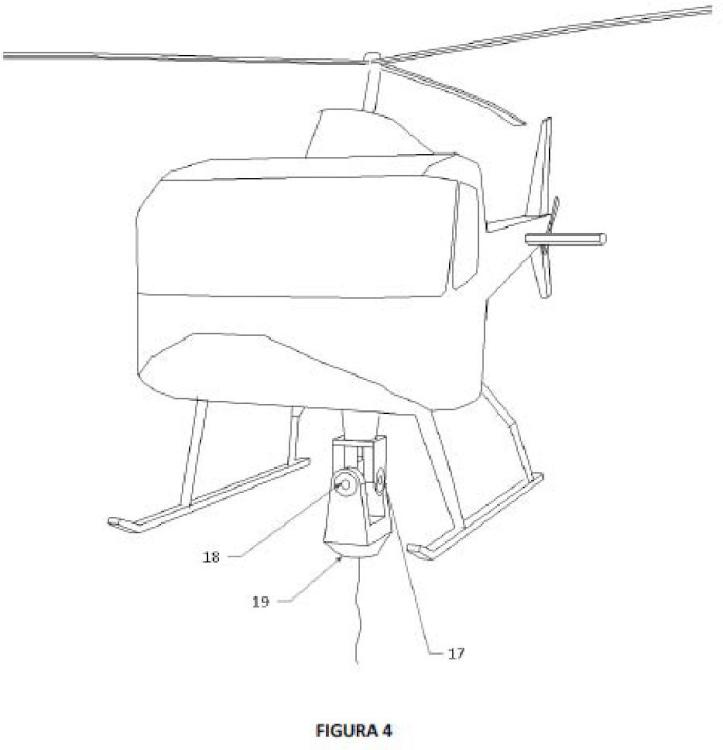
Figura 4. Representación modo de realización preferente
Se muestra una visión general del modo de realización preferente. Son visibles la aeronave, así como el dispositivo acoplado a la misma al que va sujeto el cable que une la aeronave con la 35 plataforma de aterrizaje.
Los elementos numerados en las figuras se detallan a continuación:
Figura 1
1 - Aeronave de aterrizaje vertical
2 - Dispositivo de sujeción del cable en la aeronave
3 - Cable unión aeronave-plataforma
4 - Dispositivo de sujeción del cable a la plataforma
- Plataforma de aterrizaje
Figura 2
6 - Zona de unión con la base de la aeronave
7 - Medidor de ángulo en el eje 1
8 - Medidor de ángulo en el eje 2
9 - Medidor de tensión del cable
- Cable que une la aeronave con la plataforma de aterrizaje
Figura 3
11 - Control 1
12 - Control 2
13 - Pre-alimentación
14 - Driver actuadores
- Aeronave
16 - Estimador
Figura 4
17 - Medidor de ángulo A
18 - Medidor de ángulo B
19 - Sensor piezoeléctrlco
EJEMPLO DE REALIZACION PREFERENTE
A modo explicación del "Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control", la Figura 3 muestra el esquema del sistema de control automático de una aeronave no tripulada, al que se le han añadido los componentes objeto de la invención, distinguiéndose éstos últimos por encontrarse enmarcados en el recuadro de línea discontinua.
A continuación se describe el sistema tradicional de control, así como el funcionamiento de los módulos objetos de la...
Reivindicaciones:
1. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control, caracterizado por la utilización de un cable que une la aeronave con la plataforma de aterrizaje y por el empleo de las medidas de tensión en dicho cable para corregir las consignas de control de la aeronave en función de dichas medidas.
2. Sistema automático de control de aeronaves de acuerdo con la reivindicación 1, caracterizado por la utilización de las medidas tanto en módulo como en ángulo de la tensión existente en el cable que une la aeronave con la plataforma de aterrizaje para la corrección de las consignas de control.
3. Sistema automático de control de aeronaves, de acuerdo con la reivindicación 1 y 2, en el que la medida del ángulo que forma el cable con la aeronave es utilizada para mejorar la estimación de la posición relativa entre la aeronave y la plataforma de aterrizaje, para el posterior empleo de dicha estimación en el control en posición de la aeronave.
4. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control según reivindicación 1, 2 y 3, caracterizado porque incorpora un sistema de control consistente en unos sensores, que miden la tensión del cable que une la aeronave con la plataforma de aterrizaje y los ángulos de orientación de dicho cable con respecto a un sistema asociado a la aeronave; e igualmente un módulo de control que toma como entradas la tensión -tanto en magnitud como en dirección- obtenida de los sensores indicados, además de las consignas de control generadas por el controlador de la aeronave. El sistema de control indicado calcula, a partir de la tensión en el cable, correcciones a introducir en las consignas de control.
5. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control según reivindicaciones 1, 2, 3 y 4, caracterizado porque en combinación con otros sensores de la aeronave, como pudiera ser un altímetro de precisión, y los sensores inerciales que determinan la actitud de la aeronave, se realiza a través de un algoritmo de fusión de datos una estimación la posición relativa de la aeronave, a partir de la altura de la misma y el ángulo que forma el cable con la vertical. El valor de la posición relativa obtenido por este método se utiliza entonces para incrementar la precisión de la estimación de posición proporcionada por el resto de sensores de la aeronave.
6. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control según reivindicaciones 1, 2, 3, 4 y 5, caracterizado porque el sistema de control, que fija la
posición y actitud de la aeronave a partir de la posición y actitud deseadas Pd y la posición y actitud estimadas P, consta de dos bucles de control anidados. El primer módulo de control `Control V (11) genera una consigna de fuerza -en módulo F y
dirección que debe ejercer el rotor principal de la aeronave. La consigna de
módulo F se emplea directamente para actuar sobre el control de potencia de la aeronave. Por otra parte, las consignas de ángulo son las entradas de un segundo módulo de control interno `Control 2 (12), que es el que genera consignas de pares de
fuerza T que deben aplicarse sobre el rotor para orientar su plano, a partir de la diferencia entre la consigna de dirección (fa y la medida la misma <j).
7. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control según reivindicaciones 1,2, 3, 4, 5, 6 y 7, caracterizado por la adición de un módulo (13) para el cálculo de la corrección por pre-alimentación. Las señales las señales de tensión y
ángulos en el cable que une la aeronave con la plataforma (H y GCi, 0,2 respectivamente) permiten al módulo de cálculo de la señal de pre-alimentación (13) generar una señal de corrección de las señales de actuación T que alimentan los actuadores del rotor de la aeronave.
8. Sistema de control de aeronaves no tripuladas de ala rotatoria para aterrizaje vertical en superficies móviles mediante pre-alimentación de fuerzas en el sistema de control según reivindicaciones 1,2, 3, 4, 5, 6 y 7, caracterizado porque al tomar como entrada la tensión en el cable, el módulo de cálculo de la corrección por pre-alimentación (13) puede calcular
una nueva consigna de actuación corregida T', adelantándose al efecto que tendrá una
fuerza perturbadora sobre la posición y actitud S de la aeronave (15).
Patentes similares o relacionadas:
DISPOSITIVO DE PURIFICACIÓN, DESINFECCIÓN Y CONTROL DE LA CALIDAD DEL AIRE Y ENTORNOS MEDIANTE DRON, del 7 de Julio de 2020, de TALESTECH, S.L.U: 1. Dispositivo de purificación, desinfección y control de la calidad del aire y entornos mediante dron (A) con capacidad para efectuar un vuelo […]
Sistema para el diagnóstico de turbinas eólicas de un generador eólico y método de diagnóstico de una turbina eólica, del 2 de Julio de 2020, de UNIVERSIDAD DE CASTILLA-LA MANCHA: Sistema para el diagnóstico de turbinas eólicas de un generador eólico , que comprende un vehículo aéreo no tripulado (UAV) previsto para acercarse a una turbina eólica […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Sistema y método para ocultar dinámicamente video e imágenes capturadas con una cámara de dispositivo dron, del 10 de Junio de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: dar instrucciones a un dispositivo dron para que vuele cerca de una potencial área de vigilancia mientras está en […]
Geometría de ala de aeronave de gran altitud, del 10 de Junio de 2020, de Stratospheric Platforms Limited: Una aeronave no tripulada de larga duración de gran altitud que comprende una estructura del ala, un fuselaje y una cola, que opera por encima de 15 […]
Dron neumático, del 3 de Junio de 2020, de San Jorge Tecnológicas, S.L: Un vehículo volador no tripulado con una o más hélices las cuales están conectadas a uno o más motores neumáticos adaptados para ser accionados por un fluido, caracterizados […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
Dispositivo de protección de Vehículo Aéreo No Tripulado (VANT) frente al impacto y a las altas temperaturas, del 29 de Mayo de 2020, de ARES LAVADO, ALVARO: 1. Dispositivo de protección de vehículo aéreo no tripulado (VANT) frente al impacto y a las altas temperaturas, caracterizado porque presenta: - […]