Robot de cocina accionado por motor eléctrico.
Robot de cocina (1) accionado por motor eléctrico con un vaso agitador (5) y un mecanismo agitador (6) dispuesto en su interior que presenta un árbol de salida (9),
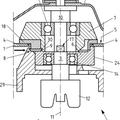
en el que el árbol de salida (9) en el curso de la inserción del vaso agitador (5) se acopla a un árbol de entrada (8) asociado a un alojamiento (4) de vaso agitador y el acoplamiento (7) está formado por una configuración no circular en sección transversal de los sectores asociados de los árboles de entrada y de salida (8, 9), caracterizado por que el árbol de entrada y/o de salida (8, 9) presenta en la zona de acoplamiento un dispositivo de amortiguación (E) que actúa en al menos dos etapas en la dirección periférica, en el que la segunda etapa, que se produce cuando se sobrepasa un momento de giro determinado, está diseñada más rígida que la primera etapa, en el que un elemento (23) que constituye la primera etapa se extiende solo a través de una zona parcial del contorno del árbol de entrada o de salida (8, 9) y en el que el elemento (23) que forma la primera etapa presenta una extensión vertical mayor que la extensión periférica.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11172953.
Solicitante: VORWERK & CO. INTERHOLDING GMBH.
Nacionalidad solicitante: Alemania.
Dirección: MÜHLENWEG 17-37 42275 WUPPERTAL ALEMANIA.
Inventor/es: JACOBS, CARSTEN, DR., BRAUN, THOMAS, ARNOLD, HANS-PETER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47J43/07 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47J MATERIAL DE COCINA; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; APARATOS PARA PREPARAR LAS BEBIDAS. › A47J 43/00 Instrumentos diversos para preparar o recibir alimentos, no previstos en otros grupos de esta subclase. › Elementos o partes constitutivas, p. ej. herramientas para mezclar o para batir.
- A47J43/10 A47J 43/00 […] › Batidores de huevo; Batidores de crema, es decir, instrumentos manuales.
PDF original: ES-2524163_T3.pdf
Fragmento de la descripción:
Robot de cocina accionado por motor eléctrico.
La invención se refiere a un robot de cocina accionado por motor eléctrico de acuerdo con las características del preámbulo de la reivindicación 1 o de la reivindicación 2.
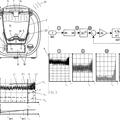
Son conocidos robots de cocina del tipo en cuestión. Estos presentan un vaso agitador que puede ser desmontado del robot de cocina, más en particular de un alojamiento en el que está dispuesto un vaso agitador giratorio en torno a un eje que está alineado verticalmente durante el funcionamiento. Este sirve por ejemplo para el mezclado, además, por ejemplo, dependiendo del diseño del mecanismo agitador para la trituración del producto a ser agitado alojado en el vaso agitador. El mecanismo agitador es accionado por un motor eléctrico del lado del robot, para lo que está previsto un acoplamiento en la interfaz entre el vaso agitador y el alojamiento del lado del robot. Para el acoplamiento de empuje de giro del árbol de entrada del lado del robot y del árbol de salida del lado del vaso agitador, los sectores de acoplamiento correspondientes de los árboles están realizados no circulares en sección transversal, sino que por ejemplo presentan una sección transversal en forma de estrella, de modo que al menos durante el funcionamiento de agitado se consigue un empuje con unión positiva de forma.
Ejemplos de la técnica anterior se pueden encontrar en el documento ya publicado EP 2 220 981 del 25-8-2010 o en el documento EP 1 702 545 de 20-9-2006.
En lo que respecta al estado de la técnica descrito anteriormente, la invención se propone el objeto de mejorar aún más un robot de cocina del tipo en cuestión en lo que atañe a la configuración del acoplamiento.
Este objeto se lleva a cabo por un lado por el contenido de la reivindicación 1, en el que se prevé que el árbol de entrada o de salida presente en la zona de acoplamiento un dispositivo de amortiguación que actué en al menos dos etapas en la dirección periférica, estando diseñada la segunda etapa, que se produce tras sobrepasarse un momento de giro determinado, más rígida que la primera etapa, de manera que un elemento que forma la primera etapa se extiende solo a través de una región parcial del contorno del árbol de entrada o de salida y que el elemento que forma la primera etapa presenta una extensión vertical mayor que la extensión periférica.
El objeto se lleva a cabo también por el contenido de la reivindicación 2, en el que se prevé que el árbol de entrada o de salida tenga en la zona de acoplamiento un dispositivo de amortiguación que actúe en la dirección periférica en al menos dos etapas, estando diseñada la segunda etapa, que se produce tras sobrepasarse un momento de giro determinado, más rígida que la primera etapa y de modo que el elemento que constituye la primera etapa forme al menos una parte de la altura del árbol de entrada y/o de salida en la zona de acoplamiento cuando dicho elemento asuma el contorno exterior, siempre en dirección vertical, paralela a un eje del árbol de entrada, del elemento del dispositivo de amortiguación que forma la segunda etapa, incluso aunque aumente o se reduzca al menos parcialmente en la dirección radial.
Debido a esta configuración se compensa un posible desplazamiento central del árbol de entrada y de salida por un elemento de amortiguación que actúa de forma diferenciada, el cual está diseñado en una primera etapa para un estado de funcionamiento con baja carga, que debido a que la segunda etapa está diseñada más rígida, en caso de altas cargas de funcionamiento no está expuesto a daños. En consecuencia, debido al dispositivo amortiguador que actúa en al menos dos etapas de forma autoorganizada, la dureza de amortiguación es ajustada al estado de carga respectivo en el empujador de acoplamiento. Debido a la extensión del elemento que forma la primera etapa a través de únicamente una zona parcial del contorno del árbol de entrada o de salida que presenta el elemento o debido a que asume al menos parcialmente el contorno exterior del elemento que constituye la segunda etapa, en caso de aumento o reducción radial al menos parcial del elemento de la primera etapa se puede conseguir una unión o separación con poca o nula fricción del compañero de acoplamiento. En particular, sin embargo, la característica mencionada en último lugar se puede considerar también opcional en cuanto al concepto descrito anteriormente. También puede suprimirse. Además, debido a la disposición del elemento que forma la primera etapa puede realizarse un cambio de carga sin fricción. Asimismo es preferible además que el elemento que constituye la primera etapa esté dispuesto y configurado de tal manera que únicamente en el caso de una carga correspondiente coopere, preferiblemente sin rozamiento, con la zona del árbol opuesto asociada a este elemento. El desgaste, especialmente de la zona sometida a esfuerzo en estado de carga del elemento que forma la primera etapa, se minimiza debido a la disposición descrita anteriormente, lo que en consecuencia conduce a un aumento de la vida útil del elemento que forma la primera etapa. En una realización del elemento para la formación de la primera etapa que asume al menos parcialmente el contorno exterior del elemento que forma la segunda etapa se tiene una realización del árbol de entrada y/o de salida en la zona de acoplamiento en conjunto al menos aproximadamente homogénea. El contorno exterior es asumido así, en cualquier caso, verticalmente, es decir, con una orientación axial paralela al árbol, eventualmente también de forma combinada en la dirección periférica, de modo que además el elemento de la primera etapa en una sección transversal considerada perpendicular al eje del árbol reproduce al menos parcialmente el curso radialmente exterior o radialmente interior del contorno del elemento de la segunda etapa, más preferiblemente con aumento o reducción al menos parcial en la dirección radial. Además, preferiblemente la asunción está prevista eventualmente solo en la zona que entra en contacto realmente en la posición de acoplamiento o la posición de carga.
La segunda etapa viene dada preferiblemente por una estructura que forma ella misma el árbol de entrada o de salida. En consecuencia, preferiblemente la segunda etapa está formada por contacto directo de sectores de estructura del árbol de entrada y de salida que cooperan entre sí, con lo que con una disposición de material correspondiente de los sectores de estructura que cooperan entre sí pueden transmitirse cargas máximas. La primera etapa del dispositivo de amortiguación no está cargada o no está cargada de forma que se dañe el material cuando la segunda etapa está diseñada más rígida, es decir presenta una menor elasticidad que la primera etapa. Además, el dispositivo de amortiguación propuesto está diseñado preferiblemente de modo que solo son transmitidas fuerzas en la dirección periférica. Por tanto, se propone un dispositivo de amortiguación que actúa solo radialmente y que funciona debido a una posibilidad de desplazamiento relativo de los árboles en la dirección periférica en torno a sus ejes de árbol.
En una realización, el dispositivo de amortiguación está fijado de forma separable al árbol de entrada o de salida, por ejemplo por fabricación del árbol respectivo en un procedimiento de dos componentes. La primera etapa del dispositivo de amortiguación está diseñada más suave, más elástica que la segunda etapa. Así, preferiblemente la primera etapa está formada por disposición de una zona blanda, más particularmente por un elemento que forma la primera etapa, mientras que la segunda etapa está formada por sectores de estructura del propio árbol. El componente blando o el elemento está hecho para ello, por ejemplo, de un material de caucho o un plástico blando, tal como TPE. También la segunda etapa o cualquier otra etapa del dispositivo de amortiguación pueden consistir en material elástico de este tipo, pero las propiedades de amortiguación, es decir la elasticidad, de estas otras etapas es ajustada siempre más dura que en la etapa dispuesta antes.
En otra realización, el elemento que forma la primera etapa está unido al sector que forma la segunda etapa, por ejemplo por unión de enchufe y/o adhesión.
Está previsto que el elemento que forma la primera etapa presente una extensión vertical mayor que la extensión periférica. La extensión periférica mencionada antes se refiere esencialmente a la medida de extensión en un plano se sección transversal que se extiende perpendicularmente al eje del árbol, más particularmente a la medida de extensión de un sector activo del elemento que forma la primera etapa, más preferiblemente sin tener en cuenta sectores... [Seguir leyendo]
Reivindicaciones:
1. Robot de cocina (1) accionado por motor eléctrico con un vaso agitador (5) y un mecanismo agitador (6) dispuesto en su interior que presenta un árbol de salida (9) , en el que el árbol de salida (9) en el curso de la inserción del vaso agitador (5) se acopla a un árbol de entrada (8) asociado a un alojamiento (4) de vaso agitador y el acoplamiento (7) está formado por una configuración no circular en sección transversal de los sectores asociados de los árboles de entrada y de salida (8, 9) , caracterizado por que el árbol de entrada y/o de salida (8, 9) presenta en la zona de acoplamiento un dispositivo de amortiguación (E) que actúa en al menos dos etapas en la dirección periférica, en el que la segunda etapa, que se produce cuando se sobrepasa un momento de giro determinado, está diseñada más rígida que la primera etapa, en el que un elemento (23) que constituye la primera etapa se extiende solo a través de una zona parcial del contorno del árbol de entrada o de salida (8, 9) y en el que el elemento (23) que forma la primera etapa presenta una extensión vertical mayor que la extensión periférica.
2. Robot de cocina según las características del preámbulo de la reivindicación 1, caracterizado por que los árboles de entrada y/o de salida (8, 9) presentan en la zona de acoplamiento un dispositivo de amortiguación (E) que funciona en al menos dos etapas en la dirección periférica, en el que la segunda etapa, que se produce tras sobrepasarse un momento de giro determinado, está diseñada más rígida que la primera etapa y en el que el elemento (23) que constituye la primera etapa al asumir el contorno exterior, siempre en dirección vertical, paralelo a un eje del árbol de entrada, que constituye la segunda etapa del dispositivo de amortiguación (E) , forma al menos una parte de la altura del árbol de entrada y/o de salida (8, 9) en la dirección de acoplamiento aunque aumente o se reduzca al menos parcialmente en la dirección radial.
3. Robot de cocina según la reivindicación 2, caracterizado por que el elemento (23) que constituye la primera etapa presenta una extensión vertical mayor que la extensión periférica.
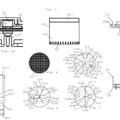
4. Robot de cocina según la reivindicación 1, caracterizado por que las dos piezas de acoplamiento de los árboles de entrada y de salida (8, 9) tienen contornos diferentes en la periferia, que se extienden, respectivamente, para alternar regularmente a través de la periferia con respecto a un círculo imaginario (L, L') formándose zonas de distancia mínima y máxima y por que el elemento (23) de la primera etapa está dispuesto en una zona de recubrimiento periférico del árbol de entrada o de salida (8, 9) , aunque no se produzca apoyo en las zonas de mínima y máxima distancia.
5. Robot de cocina según la reivindicación 1 ó 4, caracterizado por que el elemento (23) de la primera etapa está dispuesto en una zona en la que los flancos asociados del árbol de entrada y de salida (8, 9) prácticamente no se desplazan relativamente entre sí a través de la zona de desviación.
6. Robot de cocina según una de las reivindicaciones anteriores, caracterizado por que el contacto entre el elemento
(23) de la primera etapa y una zona opuesta del otro árbol respectivo, referido a una sujeción para favorecer la sujeción, es decir en el caso de pegado transversal a la superficie adhesiva (26) o en caso de una sujeción de enchufe, de modo que las fuerzas de compresión (P) son ejercidas sobre la prolongación de enchufe, se realiza centralmente.
7. Robot de cocina según una de las reivindicaciones 1 ó 4 a 6, caracterizado por que el elemento (23) de la primera etapa está dispuesto extendiéndose con forma de banda, paralelo al eje (x) del árbol y/o por que el elemento (23) de la primera etapa en el estado no cargado está realizado sobresaliendo respecto a las zonas de la segunda etapa que le rodean, siendo la medida (a) del resalte preferiblemente de 0, 2 mm a 1 mm.
8. Robot de cocina según una de las reivindicaciones 1 ó 4 a 7, caracterizado por que el elemento (23) de la primera etapa está rodeado por un espacio libre de expansión (28) , en el que el elemento (23) se extiende cuando está bajo carga.
9. Robot de cocina según la reivindicación 8, caracterizado por que el espacio libre de expansión (28) está realizado en la zona diseñada más rígida del dispositivo de amortiguación (E) .
10. Robot de cocina según una de las reivindicaciones anteriores, caracterizado por que el elemento (23) de la primera etapa está realizado como estructura hueca asociada a una punta de empujador (15) .
11. Robot de cocina según una de las reivindicaciones anteriores, caracterizado por que el elemento (23) de la primera etapa tiene una cavidad (32) continua vertical y está realizado, por ejemplo, de forma tubular.
12. Robot de cocina según una de las reivindicaciones anteriores, caracterizado por que los elementos de la primera y la segunda etapa presentan una conexión de enchufe.
13. Robot de cocina según una de las reivindicaciones anteriores, caracterizado por que los elementos de la primera y la segunda etapa están realizados en un proceso de moldeo por inyección de dos componentes.
14. Robot de cocina según una de las reivindicaciones 1 ó 4 a 13, caracterizado por que, alternando por el contorno, una punta de empujador (15, 15â?) está realizada enteramente como elemento de la primera etapa o la segunda etapa a través de la altura vertical.
15. Robot de cocina según una de las reivindicaciones 1 ó 4 a 14, caracterizado por que elementos (23) de la primera etapa que se extienden desde el lado superior e inferior (31, 30) del árbol de entrada y/o de salida (8, 9) y que apuntan uno a otro están dispuestos en el elemento para formar la segunda etapa.
Patentes similares o relacionadas:
 Procesador de alimentos con soporte de impulsor de baja fricción, del 29 de Julio de 2020, de SOCIETE DES PRODUITS NESTLE S.A.: Una máquina para homogeneizar una sustancia alimenticia, como espuma de leche o una sustancia a base de leche, como una máquina independiente o como una máquina […]
Procesador de alimentos con soporte de impulsor de baja fricción, del 29 de Julio de 2020, de SOCIETE DES PRODUITS NESTLE S.A.: Una máquina para homogeneizar una sustancia alimenticia, como espuma de leche o una sustancia a base de leche, como una máquina independiente o como una máquina […]
 Aparato de preparación de alimentos con detección de sobrepresión, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de preparación de alimentos con un recipiente de preparación de alimentos , un elemento de calentamiento para calentar un alimento en el recipiente de […]
Aparato de preparación de alimentos con detección de sobrepresión, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de preparación de alimentos con un recipiente de preparación de alimentos , un elemento de calentamiento para calentar un alimento en el recipiente de […]
 Dispositivo de preparación de alimentos con herramienta separable, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Dispositivo de preparación de alimentos con un recipiente de preparación de alimentos y una herramienta giratoria para picar y/o mezclar […]
Dispositivo de preparación de alimentos con herramienta separable, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Dispositivo de preparación de alimentos con un recipiente de preparación de alimentos y una herramienta giratoria para picar y/o mezclar […]
Accesorio de procesamiento con protección de manipulación, del 15 de Julio de 2020, de BSH HAUSGERÁTE GMBH: Accesorio de procesamiento para procesar alimentos para su uso con un procesador de alimentos, que presenta un elemento de formación de tapa […]
Máquina de cocina accionada por motor eléctrico, así como vaso de batido y mecanismo batidor para ella, del 15 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Vaso de batido para una máquina de cocina accionada por motor eléctrico, que comprende un fondo del vaso que presenta una abertura […]
Aparato de cocina accionado por electricidad, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato de cocina accionado por electricidad, en particular aparato de mezcla y cocción, para la preparación de un producto de cocción, que presenta […]
SISTEMA DE COCCIÓN, del 15 de Junio de 2020, de BSH ELECTRODOMESTICOS ESPAÑA S.A.: Sistema de cocción. La presente invención hace referencia a un sistema de cocción, en particular, a un sistema de cocción por inducción, con al menos una unidad […]
Aparato doméstico para la preparación de alimentos y procedimiento para accionar un aparato doméstico de este tipo, del 10 de Junio de 2020, de BSH HAUSGERÁTE GMBH: Aparato doméstico para preparar alimentos, el cual presenta al menos una unidad de calentamiento mediante la cual es generable calor […]