Dispositivo para geo-localización 3D y orientación de tomas fotográficas terrestres.
Dispositivo para geo-localización 3D y orientación de tomas fotográficas terrestres.
Se describe en la memoria descriptiva de la presente invención un desarrollo de un sistema para la geo-localización 3D y orientación de tomas fotográficas terrestres realizadas desde trípode con la finalidad de automatizar la obtención de modelos tridimensionales y ortofotos de manera rápida, precisa y automática. Para ello se detalla un dispositivo que permite alojar una unidad central para procesar datos que llegan de varios sensores como pueden ser sensores de geolocalización y otro tipo de sensores que permiten captar datos que son procesados por dicha unidad de proceso e incorporarlos a las imágenes.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330645.
Solicitante: UNIVERSIDAD DE SALAMANCA.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ AGUILERA,DIEGO, FERNÁNDEZ HERNÁNDEZ,Jesús, RODRÍGUEZ GONZÁLVEZ,Pablo, HERNÁNDEZ LÓPEZ,David.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 11/00 Fotogrametría o videogrametría, p. ej. estereogrametría; Topografía fotográfica. › Disposiciones para tomar fotografías especialmente adaptadas para la fotogrametría o la topografía fotográfica, p. ej. control de la superposición de fotografías.
- G01S19/13 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 19/00 Sistemas de posicionamiento por satélite; Determinación de la posición, de la velocidad o de la actitud por medio de señales transmitidas por tales sistemas. › Receptores.
Fragmento de la descripción:
OBJETO DE LA INVENCIÓN
La presente invención se enmarca en el campo de la instrumentación destinada a toma de imágenes geolocalizadas.
El objeto de la invención consiste en un sistema para la geolocalización 3D y orientación de tomas fotográficas terrestres realizadas desde trípode con la finalidad de automatizar la obtención de modelos tridimensionales y ortofotos de manera expedita y automática.
ANTECEDENTES DE LA INVENCIÓN
El posicionamiento directo, espacial y angular, de las cámaras fotográficas ha sido durante décadas una meta perseguida y ansiada por parte de la fotogrametría tanto aérea como terrestre que tenía que recurrir a procedimientos indirectos (topográficos) para la 20 determinación de la posición de sus cámaras. Más concretamente, había que recurrir al establecimiento de una red de puntos de apoyo y chequeo levantados por instrumental y personal topográfico que permitiese resolver la indeterminación de la posición de los puntos de vista de la cámara y por tanto el problema de intersección inversa. Con el paso de los años y la evolución de la tecnología esta indeterminación, más acusada en el caso de las 25 cámaras aerotransportados en movimiento, se ha resuelto satisfactoriamente con la entrada en escena de los sistemas de posicionamiento por satélite GNSS y muy especialmente con su hibridación con los sensores inerciales IMU, lo que a ha permitido aspirar a la georreferenciación directa de las cámaras en tiempo real. Una prueba del grado de avance en este campo y muy particularmente en el de la fotogrametría aérea son los numerosos 30 desarrollos en forma de algoritmos, métodos numéricos e incluso patentes en el campo de la georreferenciación directa de cámaras fotogramétricas aéreas mediante la integración GNSS/IMU. Gracias a esta hibridación se está en disposición de hacer frente a la determinación directa de la posición espacial y angular de una cámara en movimiento y por
ende la posibilidad de resolver el proceso de orientación de las imágenes y la generación de productos cartográficos de manera automática, esencial en muchas aplicaciones en las que se demanda un alto grado de inmediatez en la obtención de este tipo de resultados.
En la actualidad se conocen algunos dispositivos para posicionamiento espacial y angular como el descrito por el documento P200900365 donde se describe un soporte de sistema fotogramétrico multi-cámara portátil para aplicaciones terrestres que facilita la georreferenciación directa y la calibración en procesos fotogramétricos; para ello cuenta con un cuerpo central provisto de un habitáculo para el alojamiento de un sistema de navegación inercial INS en su interior y con posibilidad de giro horizontal, una base que soporta sensores y cámaras, y una antena GNSS dispuesta en la parte superior del soporte, posibilitando así tres realizaciones consistentes en: un modelo rígido en el que la situación relativa de los sistemas particulares de coordenadas, con respecto al sistema general definido por el soporte, permanece constante durante el proceso de medición; un modelo con eje horizontal giratorio en el que las cámaras y sensores pueden tener giro de cabeceo; y un modelo con eje horizontal giratorio más sistema de verticalización de antena que permite cabeceo y alabeo de cámaras y sensores, y evita faltas de verticalidad en la antena. El soporte aquí descrito requiere que ambas cámaras mantengan los mismos giros y sólo permite dos grados de libertad, acimutal y vertical, este último limitado por la propia construcción del artefacto. Incorpora un sistema GNSS topográfico de coste elevado. Asimismo, se trata de un sistema enormemente pesado que dificulta su movilidad en campo de forma ágil y más aún en escenarios complejos (zonas estrechas sin espacio).
También se conocen otros desarrollos como la Plataforma multisensorial militar controlada a distancia para aplicaciones de monitorización de tráfico marítimo, labores de vigilancia, patrullas de costa denominada Sea Cobra System ( http://www.chess- dynamics.com/products/sea-cobra-system.html . En este dispositivo los diferentes sensores que incorpora (cámara visible, térmica, distanciómetro) no son intercambiables; y dado que el problema técnico que plantea es el de vigilancia, no sirve a propósitos fotogramétricos, ya que sólo incorpora una cámara visible, que además presenta paralaje frente al eje de giro por lo tampoco es adecuada para la generación de panoramas. La plataforma presenta dos grados de libertad respecto a los giros (horizontal y vertical), y no incorpora sistemas de posicionamiento GNSS ni IMU. En este tipo de dispositivos se encuentra el Fovex Measure
3D ( http://www.fovex.com/ ) que es una plataforma robotizada para la generación de panoramas. Presenta una única posibilidad de rotación (acimutal) y no permite cámaras intercambiables ya que emplea un sensor TDI (time delay and integration); hace uso de un movimiento robotizado que permite generar panoramas y solamente mediante múltiples 5 estaciones reconstrucciones 3D de objetos; asimismo carece de sistemas de
posicionamientos GNSS y sistema IMU que le dote de capacidades de geolocalización y explotación fotogramétrica.
En este sentido, la presente invención permite conocer de forma directa, precisa y con bajo- 10 coste las coordenadas espaciales (X,Y,Z) y angulares ("axis", "tilt", "swing") del punto de
vista de la cámara, habilitando la posibilidad de acometer procesos de medición
fotogramétrica y de reconstrucción 3D sin necesidad de procedimientos invasivos de apoyo topográfico o medición sobre el objeto o escenario, permitiendo obtener productos
fotogramétricos como los modelos tridimensionales y las ortofotos de manera automática a 15 partir de la toma de imágenes múltiples horizontales o convergentes de un mismo objeto o escenario.
DESCRIPCIÓN DE LA INVENCIÓN
El objeto de la invención aporta una solución al problema anteriormente planteado de manera que se permite obtener una georreferenciación directa de cámaras terrestres embarcadas en trípode mediante un sistema flexible y portable que incorpora sensores de posicionamiento espacial y angular de bajo coste sin renunciar a la precisión y calidad en sus resultados.
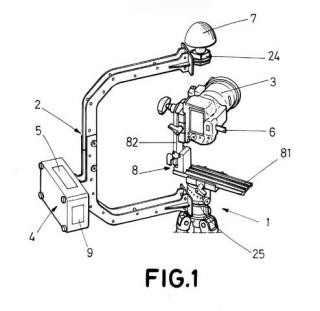
Para ello el dispositivo aquí descrito que permite la orientación directa de cualquier cámara haciendo uso de un trípode, dotando a cualquier toma fotográfica de coordenadas espaciales (X, Y, Z) y angulares ("Axis"-giro acimutal, "Tilt"-giro vertical, "Swing"-giro propio). Esto permite la posibilidad de realizar modelos tridimensionales y ortofotos de manera 30 rápida y automática en cualquier aplicación terrestre relacionada con la ingeniería y la arquitectura en la que se requieran la toma de imágenes. El dispositivo aquí descrito consta principalmente de un soporte articulado en forma de "arco" fabricado en un material ligero y resistente como puede ser fibra de carbono, que permite, gracias a su forma específica,
flexibilidad en los giros acimutales (axis) del soporte, y libertad de movimientos de la cámara incluso en su posición cenital, gracias al abatimiento vertical de su parte central.
El dispositivo dispone de un sistema GNSS (Global Navigation Satellite System) de bajo 5 coste para el posicionamiento espacial integrado por un módulo GNSS y una antena ensamblada en el extremo superior del soporte y alineado con la vertical del centro óptico de la cámara (2) y que garantiza la obtención de coordenadas espaciales (X, Y, Z) de precisión centimétrica. Un sistema IMU (Inertial Measurement Unit) de bajo coste para el posicionamiento angular de la cámara incorporado en la parte superior de esta (base para 10 flash externo) y solidario con ella (3). Una unidad de control terrestre, computadora portátil, de bajo coste responsable del procesado, sincronización y almacenamiento de la información, de tipo tableta con pantalla táctil protegida por una carcasa metálica estanca y anclada al propio soporte (1) que permite la gestión del sistema en la toma de fotos, así como el almacenamiento de los datos de posición espacial y angular. Un soporte para la 15 cámara del tipo rótula de bola, micrométrica o panorámica (5) para embarcar la propia cámara y que permite la realización de giros específicos en la toma de imágenes.
La presente invención describe un sistema ligero, preciso y de bajo coste para la geo- localización 3D y orientación de tomas fotográficas terrestres embarcadas en trípode que 20 permite determinar de forma directa la posición (X, Y, Z) y orientación (Axis,Tilt,Swing) de la cámara y por ende la posibilidad de obtener modelos digitales tridimensionales y ortofotos de manera automática. Para ello, el sistema requerirá...
Reivindicaciones:
1. Dispositivo (1) para geo-localización 3d y orientación de tomas fotográficas terrestres que comprende:
un primer soporte (2) articulado que comprende al menos un brazo superior (21) y un brazo inferior (22) unidos por una articulación (23) en cuyos extremos libres se encuentran respectivamente ubicados un primer alojamiento (24) que se encuentra en un extremo libre del brazo superior (21) y un segundo alojamiento (25) que se encuentra ubicado en un extremo libre del brazo inferior (22) donde el segundo alojamiento (25) se encuentra adaptado para fijar el dispositivo (1) a al menos un trípode,al menos una unidad de proceso (4) fijada al soporte (2)
dispositivo (1) caracterizado porque comprende:
un sensor de posicionamiento espacial (5) vinculado a la unidad de proceso (4) y que se encuentra ubicado en la parte superior del soporte (2) y alineado con la vertical del centro óptico de la cámara (3),
un sensor de posicionamiento angular (6) de la cámara (3) solidario a la misma y fijado a la parte superior de ésta, y
una antena de posicionamiento espacial (7) asociada al sensor de posicionamiento espacial (5) y alojada en el primer alojamiento (24) del brazo superior (21) del soporte (2).
2. Dispositivo (1) según reivindicación 1 caracterizado porque el primer alojamiento (24) se encuentra ubicado en una posición alineada con respecto de la vertical del centro óptico de la cámara (3).
3. Dispositivo (1) según reivindicación 1 caracterizado porque antena de posicionamiento espacial (7) se encuentra ubicada en una posición alineada con respecto de la vertical del centro óptico de la cámara (3).
4. Dispositivo (1) según reivindicación 1 caracterizado porque el sensor de posicionamiento angular (6) comprende al menos tres acelerómetros y tres giróscopos.
5. Dispositivo (1) según reivindicación 1 caracterizado porque el sensor de posicionamiento espacial (5) forma parte de la unidad de proceso (4).
6. Dispositivo (1) según reivindicación 1 caracterizado porque comprende un segundo 5 soporte (8) destinado a ser fijado al primer soporte (2) y a alojar al menos una cámara (3),
segundo soporte (8) comprende una base (81) de la cual parte un miembro vertical (82) del cual parte un miembro horizontal (83) paralelo a la base (81) donde la base (81) y los miembros (82,83) se encuentran unidos solidariamente por fijaciones ajustables.
7. Dispositivo (1) según reivindicación 1 caracterizado porque la unidad de proceso (4)
comprende una pantalla táctil destinada a mostrar información y a permitir la entrada de datos a la unidad de proceso (4).
8. Dispositivo (1) según reivindicación 1 caracterizado porque adicionalmente comprende al 15 menos dos pasadores destinados a bloquear movimiento de la articulación que une los
brazos (21,22) impidiendo el movimiento de la menos uno de ellos.
9. Dispositivo (1) según reivindicación 6 caracterizado porque al menos uno de la: base (81) y los miembros (82, 83) comprenden medios de fijación para fijar la cámara (3) al segundo
soporte (8).
Patentes similares o relacionadas:
 Procedimiento de observación de la superficie terrestre y dispositivo para su implementación, del 29 de Julio de 2020, de Airbus Defence and Space SAS: Procedimiento de adquisición de imágenes de la superficie terrestre, que comprende las etapas de:
- colocación de una primera plataforma […]
Procedimiento de observación de la superficie terrestre y dispositivo para su implementación, del 29 de Julio de 2020, de Airbus Defence and Space SAS: Procedimiento de adquisición de imágenes de la superficie terrestre, que comprende las etapas de:
- colocación de una primera plataforma […]
Dispositivo de imágenes para escenas en movimiento aparente, del 17 de Junio de 2020, de Urugus S.A: Un aparato para obtener imágenes de una escena que tiene movimiento aparente, el aparato que comprende: un dispositivo de imágenes de área […]
Procedimientos de dirección de línea de corte para formar una imagen de mosaico de un área geográfica, del 25 de Marzo de 2020, de PICTOMETRY INTERNATIONAL CORP.: Un procedimiento ejecutado en un sistema informático sin requerir intervención humana para dirigir automáticamente líneas de corte de mosaico a lo largo de rutas preferidas […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Un sistema de cámara aérea, del 8 de Enero de 2020, de Spookfish Innovations Pty Ltd: Un sistema de cámara aérea que comprende: al menos una cámara dispuesta para capturar una pluralidad de imágenes sucesivas, incluyendo […]
Procedimiento de adquisición de imágenes de una escena, desde un sensor a bordo de un portador en desplazamiento, con servocontrol de su línea de visión, del 25 de Diciembre de 2019, de THALES: Procedimiento de adquisición de imágenes de una escena terrestre predeterminada, desde un portador en desplazamiento según una trayectoria […]
Sistema de gestión de plataforma móvil en tiempo real, del 23 de Octubre de 2019, de PICTOMETRY INTERNATIONAL CORP.: Un sistema de comunicación de datos entre un sistema de plataforma móvil y un sistema de estaciones terrestres en tiempo real, que comprende: el sistema de plataforma […]
Procedimiento de adquisición de imágenes por un instrumento óptico espacial o aerotransportado con un campo de visión extendido, del 2 de Octubre de 2019, de THALES: Procedimiento de adquisición de imágenes por un instrumento (IOS) óptico espacial o aerotransportado, que comprende las etapas siguientes: a) adquisición, por medio […]