Dispositivo de cambio de desarrollo para bicicletas movido por actuadores lineales controlados electrónicamente y con procesador de radio frecuencia.
Dispositivo de cambio de desarrollo para bicicletas movido por actuadores lineales controlados electrónicamente y con procesador de radiofrecuencia,
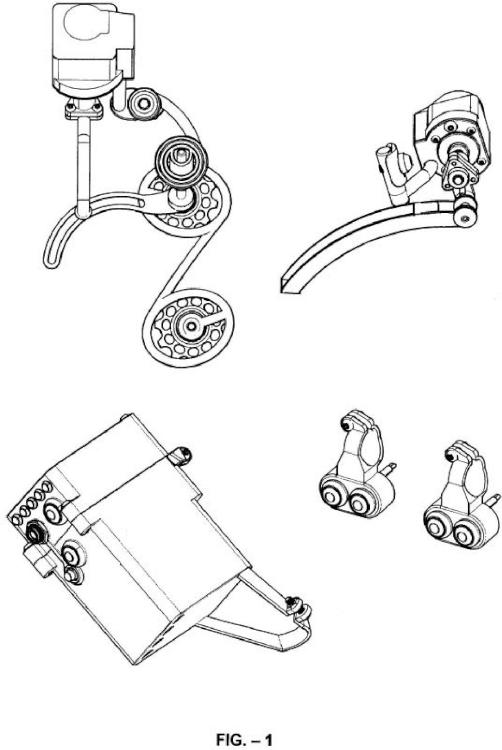
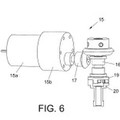
que se basa en el principio tradicional cuyo cambio se realiza mediante el desvío de la cadena de la bicicleta para su alineación con el plato o piñón al que se desea cambiar pero combinando componentes eléctricos y mecánicos para producir estos desvíos. El dispositivo está compuesto por 4 conjuntos. Conjunto desviador trasero que utiliza un actuador lineal de tipo interno (1) controlado electrónicamente para hacer rotar un husillo (3) que provoca el movimiento de un mecanismo y éste desencadena la alineación de la polea desviadora y la sitúa cerca del piñón deseado. Conjunto desviador delantero que también utiliza un actuador lineal de tipo interno (35) controlado electrónicamente para hacer rotar un husillo (37) que produce un desplazamiento lineal del componente desviador (52) alineándolo con el plato deseado. Conjunto de potencia y control compuesto por módulos electrónicos, para controlar y manejar una batería, 2 motores eléctricos y un procesador de radiofrecuencia y otros componentes eléctricos que junto a un algoritmo proporcionan tres modos de cambio, estos componentes interconectados van cajeados por una cubierta inferior (55) y otra superior (54) y situarán probablemente al conjunto en posición bajo el sillín. Y un conjunto de pulsadores con al menos 2 botoneras utilizadas para efectuar los cambios y algunos ajustes que irán situadas en el manillar y su diseño se ajustará al tipo de manillar que se esté utilizando para que los botones se puedan accionar de manera ergonómica.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300153.
Solicitante: GONZALEZ GARCIA, Alberto.
Nacionalidad solicitante: España.
Inventor/es: GONZALEZ GARCIA,Alberto.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62M25/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62M PROPULSION POR EL CONDUCTOR DE VEHICULOS DE RUEDAS O DE TRINEOS; PROPULSION POR MOTOR DE TRINEOS O DE CICLOS; TRANSMISIONES ADAPTADAS ESPECIALMENTE A ESTOS VEHICULOS (disposiciones o montaje de transmisiones de vehículos en general B60K; elementos de transmisión en sí F16). › B62M 25/00 Mandos para mecanismos de cambio de velocidad adaptados especialmente a los ciclos (mandos por ciclos accionados por el conductor, en general B62K 23/00; mecanismos de cambio de velocidad en sí F16H). › con sistemas de transmisión eléctrica o por fluído.
Fragmento de la descripción:
DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA
OBJETO DE LA INVENCiÓN
La presente invención, según se expresa en el enunciado de este documento, se trata de un dispositivo electro-mecánico para realizar las operaciones de cambio de desarrollo en bicicletas. Los cambios de desarrollo en bicicletas tradicionalmente se han venido realizando moviendo unas palancas indexadas de gran tecnología que mediante cable metálico desplazan un mecanismo cuyo objetivo es el alineamiento de la cadena de la bicicleta con el piñón o plato al que se desea cambiar. la precisión de estos mecanismos es alta y los modelos de más alta gama realmente desarrollan su función muy bien pero hay que decir que esta precisión puede ser mejorada, también la velocidad del cambio ya que el desplazamiento de las palancas· de cambio toma tiempo debido a su recorrido, los mecanismos aun los de alta gama han de ser regulados cada cierto tiempo debido a pequeñas deformaciones de componentes y dilataciones de los cables. Estos problemas entre otros son los que han hecho diseñar al autor de este documento un dispositivo electro-mecánico para realizar esta función de cambio de desarrollo en bicicletas que mejora ampliamente las prestaciones de los modelos de cambio únicamente mecánicos así como añade nuevas prestaciones ya que incorpora un procesador de radio frecuencia que se puede comunicar con un ordenador de bicicleta para transmitir desde el dispositivo datos como el piñón y el plato en los que se está, estado de la batería, posibles errores del dispositivo y recibir datos de los distintos sensores de parámetros que hoy en día utilizan gran número de bicicletas, a través del ordenador de bicicleta principalmente, como velocidad y potencia desarrollada por el ciclista así como parámetros propios del ciclista como pueden ser el umbral funcional de potencia, el peso corporal, etc y de la bicicleta como el número de dientes en cada plato y piflón.
Como los modelos clásicos de cambio de desarrollo el dispositivo tiene un Conjunto Desviador Trasero y un Conjunto de Desviador Delantero, conjuntos que realizan los cam bias y cuyo movimiento se realiza con actuadores lineales del tipo interno cuyo husillo rota cuando son actuados produciendo un desplazamiento lineal de una tuerca guiada a una velocidad determinada, con una fuerza máxima de empuje también delenninada y que han de ser las apropiadas para el correcto funcionamiento del dispositivo. Estas tuercas van acopladas a mecanismos que producen el correcto movimiento de los componentes desvjadorE~S y de esta manera se produce el cambio. Los actuadores lineales como motores elédricos que son han de estar controlados electrónicamente para que su rotación SE!a la adecuada en cada momento y por supuesto han de ser alimentados de la corriente eléctrica y la diferencia de potencial óptimos para su correcto funcionamiento, para lo que se necesita una batería (paquete de células de batería recargables) que ¡proporcione esta potencia. El dispositivo contiene un Conjunto de Potencia y Control que consiste en una caja donde se introducen varios módulos electrónicos, el paquete de baterías así como los interruptores, conectores y LEDs necesario:s para el correcto funcionamiento y control del dispositivo. A este Conjunto de Potencia y Control se conectan los motores así como un Conjunto de Pulsadores formado por 2 botoneras con 2 pulsadores cada una que sirven para el manejo del dispositivo por el ciclista. Estos conjuntos van todos conectados al control por cuatro grupos de cables con el número de cables apropiado cada uno bien sea para conectar un motor/c:odificador o una botonera (generalmente 8 polos para cada motor/codificador y tres poliOS para cada botonera) .
Estos cuatro conjuntos están ilustr.ados en la figura 1 de este documento y posteriormente en otras figuras se ilustran independientemente cada uno y desmontados. Los conjuntos desviadores se acoplan a la bicicleta de la manera más estándar utilizada hoy en día para los difl:uentes tipos de bicicleta, el Conjunto de Potencia y Control se puede situar debajo del sillín acoplándose a las barras de este y al tubo sillín mediante abrazaderas ajustadas con tomillos ligeros y el Conjunto de Pulsadores se acoplan al manillar de la bicideta con abrazaderas y tomillos ligeros en posición adecuada para el tipo de manillar de que se trate, bien sea este de bicicleta de montaña ó urbana, de carretera ó de contra-reloj ó triatlón.
El dispositivo descrito y expuesto E~n este documento posee una batería de última tecnología y gran densidad de carga para proporcionar una larga duración y gran número de ciclos de carga/descarga y además posee un módulo electrónico para su manejo y control que optimiza la operaci';ln de esta, posee módulos electrónicos de control de los actuadores que poseen componentes de la más moderna tecnología que optimizan las prestaciones de estos y su consumo de energía, posee un módulo procesador de radio frecuencia que puede intercambiar información con un ordenador de bicicleta que permite al sistema junto con un algoritmo de propio desarrollo la existencia de 3 modos de cambio de desarrollo posibles: el "Habitual" de piñón y plato individual y por separado accionando un Ibotón para cada plato ó piñón, un modo innovador que es el modo de "Cambio de Desarrollo" a un desarrollo mayor °a uno menor con lo que una sola pulsación de botón podría cambiar ambos plato y piñón de una vez y un tercer modo de cambio también innovador similar al anterior en que cambia directamente el desarrollo pero lo hace por si mismo "Cambio Automático~, según sea la entrada de la señal de potenc;ia desarrollada por el ciclista y transmitida desde un sensor de potencia al ordenadClr de la bicicleta y de acuerdo al nivel de potencia que el ciclista quiera desarrollar de modo continuo durante su sesión de entrenamiento y con un adecuado margen de variabilidad establecido por el ciclista. Todo sin la intervención del ciclista que ha de concentrarse únicamente en pedalear y por supuesto dirigir la bicicleta. Se puede Célmbiar de un modo de cambio de desarrollo a otro solo con la pulsación de ciertos botones en un corto espacio de tiempo (alrededor de 2.5 segundos) .
Todo el dispositivo ha de estar realizado utilizando materiales avanzados de alta resistencia y baja densidad como Aluminio, Fibra de Carbono, Titanio, Cerámica, etc, se consigue un peso del dispositüvo similar al de los modelos clásicos completamente mecánicos. A su vez se ha de realizar de manera que su operación y estado sea resistente al agua en todo momento por lo que todos los conjuntos han de superar la norma de estanqueidad 1P67 qLH:! se considera necesaria para la operación y durabilidad del dispositivo que aquí se describe.
Por consiguiente el sistema que reivindica esta invención consiste en un sistema de cambio de desarrollo para bidcletas electro-mecánico con mecanismo innovador, actuadores innovadores, control innovador y transmisión de datos también innovadora que permite excelentes prestaci4:>nes de cambio.
ANTECEDENTES DE LA INVENCiÓN
El estado de la técnica nos muestra que existen ya dispositivos electromecánicos de cambio de desarrollo para bicicletas fabricados por las principales marcas productoras de estos componente-s pero estos son muy diferentes al aquí expuesto ya que en estos la parte mecánica de ambos desviadores es de similares características que las de dispositivos entE~ramente mecánicos, conteniendo un gran número de componentes, utilizando unos micro motores eléctricos para producir el movimiento que en los dispositivos complc:!tamente mecánicos proporciona el cable metálico al accionar las palancas de mando. Estos utilizan a su vez batería recargable y el sistema de control de los motores adecuado para estos. Estos dispositivos proporcionan precisión y velocidad en los movimientos de los desviadores pero solo disponen de un único modo de cambio de desarrollo que es el "Habituar de plato y piñón individualmente y por separado aClcionando un interruptor para cada caso. Aunque alguno posee el uso de radio frecuencia para comunicar con el ordenador de la bicicleta de su propia fabricación y protocolo de transmisión de datos no hacen uso de datos que podrían ser transmitidos al dispositivo como pueden ser la potencia desarrollada por el ciclista, peso corporal del ciclista, la velocidad de la bicicleta, etc.
Por consiguiente estos dispositivos de cambio de desarrollo para bicicleta ya existentes en el mercado solo son similares al dispositivo expuesto en este documento en el uso del principio de desvío de la cadt~na de la bicicleta para producir el cambio de plato ó piñón,...
Reivindicaciones:
1. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA, Que estando compuesto por
componentes mecánicos y eléctricos se caracteriza por tener un Conjunto Desviador Trasero con movimiento llevado a cabo por un actuador lineal eléctrico y un mecanismo que efectúan el desplazamiento de la polea desviadora y el tensionado de la cadena, por tener un Conjunto Desviadllr Delantero con movimiento llevado a cabo por un actuador lineal eléctrico y un mecanismo que efectúan el desplazamiento del desviador delantero de la cadena, por tener un Conjunto de Potencia y Control que contiene un paquete de baterías recargables y componentes eléctricos que permiten el manejo y control del dispositivo y la comunicación con otros dispositivos de la bicideta.
El Conjunto de Potencia y Contro, 1 que posee dos cubiertas superior (54) e inferior (55) unidas a modo de cajeado con unión con tomillos (65) (66) en cuyo interior
se alojan diversos componentes que son un paquete de baterías recargables (56) , un módulo electrónico (57) con el micro-controlador maestro del dispositivo y también destinado al control y manejo de la batería, un segundo módulo electrónico (58) con algoritmos en él cargados para el manejo y control de los actuadores del dispositivo, un tercer módulo electrónico (59) con procesador de radio frecuencia en la banda de 2.4 GHz y con un protocolo compatible con otros dispositivos como un ordenador de la biedeta y otros sensores que actúan en la misma banda para el intercambio de datos.
Los dos últimos módulos conectados al primero mediante interfaces de entrada y salida. Las cubiertas tienen agujeros donde se instalan componentes eléctricos que son el interruptor de potencia (60) del dispositivo, una conexión (61) para la carga de la baterra, 5 LEDs (63) para mostrar posibles errores del disposilivo y el estado de la baterfa cuando se presiona el pulsador (62) conectado al módulo de control y manejo de esta y en la parte inferior de la cubierta inferior se posicionan cuatro conectores circulares donde se conectarán los grupos de cables Que vienen de los actuadores/codificadores y de los pulsadores y que van conectados a entradas/salidas del módulo electrónico (58) de control y manejo de los actuadores. Este Conjunto de Polencia y Control posee dos abrazaderas o bridas en la cubierta inferior para el anclaje del conjunto y se ajustan con gruP () S tomillo/tuerca (67) (68) .
El módulo electrónico de control de los actuadores con algoritmos y subalgoritmos descargados en él, algunos sub-algoritmos realizan las funciones de los movimientos de los actuadores, que lIamaldos desde el algoritmo principal la primera acción que realizan es solicitar a través de las interfaces del sistema electrónico la velocidad de la bicicleta, que se recibe por radio frecuencia desde los sensores de este parámetro o desde el ordenador de bicicleta, una vez recibidos estos valores el sub-algoritmo correspondiente puede calcular y calcula el valor de la velocidad angular de platos y piñones ya que conoce los vellores de la circunferencia de la rueda y el desarrollo en uso. Si el valor calculado es superior a un valor determinado definido en el dispositivo como el limite mlnlmo el sub-algoritmo procede con el proceso de movimiento de los actuadores o regresa al algoritmo principal si el valor calculado es inferior a este limite.
Otro de los sub-algoritmos recibo a través de las interfaces del sistema electrónico datos correspondientes al número de dientes en cada plato y piñón de la bicicleta que son introducidos por el usuario de esta cuando se inicializa el dispositivo. El sub-algoritmo calcula todos los desarro.lIos posibles dividiendo los dientes en cada plato por los dientes en cada piñón y los almacena en una matriz (i, j) donde i especifica el número de plato y j el número de piñón. A continuación el sub-algoritmo ordena por su valor los desarrollos y los almacena en un vector (h) , utilizando este sub-algoritmo el dispositivo puede realizar un modo de cambio en el que la pulsación de un solo botón proporciona el cambio a un desarrollo superior o a uno inferior llevando a cabo el cambio tanto de plato cc) mo de piñón, si fuera necesario, para subir O bajar el desarrollo, Cuando el algoritmo principal detecta la señal del botón correspondiente estando en modo de cambio de desarrollo a través de las entradas de este módulo electrónico, el algoritmo llamará a un sub-algoritmo para subir desarrollo o a otro para bajar desarrollo según cuál sea la senal recibida, estos algoritmos después de determinar si la velocidad de la bicicleta permite el movimiento del actuador llamarán al sub-algoritmo de cálculo de desarrollos enviando los valores de plato y piñón actuales i y j y el valor que indique si se ha de determinar el desarrollo superior o inferior, con estos valores el algoritmo determina el valor del desarrollo actual almacenado en la matriz y comparando este valor con el vector que almacena los desarrollos ordenados determina la posición del desarrollo actual y entonces el valor del desarrollo mayor o menor que corresponda, el cual de nuevo se compara con los desarrollos de la matriz para determinar los nuevos valores de plato y piñón retornando estos al sub-algoritmo desde donde este fue llamado, Después de que el
sub-algoritmo correspondiente comprueba que la nueva posición está autorizada ordena los movimientos de los actuadores correspondientes a plato y piñón a las nuevas posiciones.
El algoritmo principal y sub-algoritmos descargados en el módulo electrónico de control de los actuadores también posibilitan el modo de cambio automático que efectúa el cambio de desarrollo expuesto Eln el párrafo anterior a un desarrollo superior
o inferior de manera automática. Si la bicicleta posee sensores para determinar la potencia desarrollada por el ciclista, el dispositivo es capaz de recibir estos datos a través del módulo de radio frecuencia y tr.:lnsmitirtos al algoritmo principal a través de las diferentes interfaces del sistema electrónico cuando el modo de cambio actuando es el automático, modo que el ciclista activa cuando quiere desarrollar un nivel de potencia lo más constante posible como debe ocurrir durante una sesión de entrenamiento. Cuando esto ocurre el algoritmo principal solicita a través de las interfaces del sistema electrónico al ordenador de bicicleta los parámetros del ciclista Umbral Funcional de Potencia y Peso Corporal que el usuario deberá introducir en el ordenador y a continuación el algoritmo solicitará al ordenador los parámetros de la sesión de entrenamiento Factor de Intensidad, que es un porcentaje del Umbral Funclonal de Potencia, y Margen de Varia.bllidad que es otro porcentaje cuyo nombre define. Con estos valores el algoritmo calcula la intensidad de potencia correspondiente a la sesión de entrenami, ento así como los límites superior e inferior de esta y entonces los correspondiente:s valores límite de Potencia Normalizada, definida como potencia dividida por peso corporal del ciclista , definiendo el intervalo de Potencia Normalizada en el que el ciciista quiere realizar su sesión de entrenamiento. Según recibe el algoritmo principal las lecturas de potencia calcula una media de esta durante un periodo de tiempo determinado, este valor medio también se normaliza y se compara con los valores limite calculados, 51 el valor medio de Potencia Normalizada es superior al valor límite superior de Potencia Normalizada el ciclista estará realizando un esfuerzo mayor del deseado por lo que el algoritmo llamará al sub-algoritmo mencionado para que el dispositivo realice un cambio a un desarrollo inferior y llamará al sub-algoritmo para subir desarrollo y que el dispositivo realice un cambio a un desarrollo superior si el valor medio de Potencia Normalizada es inferior al valor límite inferior de Potencia Normalizada ya que el ciclista estará realizando un esfuerzo menor del deseado. Si el ciclista desarrolla un nivel medio de Potencia Normalizada por debajo del nivel considerado de recuperación el algoritmo continuará su proceso que es volver al inicio de bucle para detectar un nuevo cambio de desarrollo. El algoritmo permite al ciclist'3 iniciar una nueva y diferente sesión de entrenamiento modificando los parámetros personales y de la sesión de entrenamiento o únicamente los parámetros de la sesión de entrenamiento mediante la presión de determinados botones cuyas señales enviarlan el proceso del algoritmo al lugar de solicitud de los parámetros deseados.
El dispositivo también contiene un Conjunto de Pulsadores para realizar ciertos ajustes en el dispositivo y los cambios de desarrollo manuales.
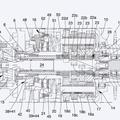
2. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA, según reivindicación 1, se caracteriza por tener un Conjunto Desviador Trasero que utiliza para efectuar los movimientos un actuador lineal eléctrico de tipo interno (1) , con un codificador (2) , ambos conectados a un control electrónico, y con un husillo (3) cuya posición angular el codificador envía al control electrónico. El actuador se ancla en la pieza de fijación (4) mediante tomillos pequeños (10) y a esta pieza también se ancla una cubierta (12) del actuador con tomillos (11) .
3. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRI:CUENCIA, según reivindicación 1, se caracteriza por tener un Conjunto Desviador Trasero, que posee un mecanismo formado por una tuerca motor (5) roscada al husillo (3) , tuerca que se ancla al resto del mecanismo con tomillos (8) que la unen al componente acoplamiento 1 (6) utilizando arandelas de presión (9) entre ambos componentes. En el hueco del otro extremo del componente acoplamiento 1 se inserta mediante ajuste a presión el
acoplamiento 2 (7) después de introducir Elntre estos el componente guia (23) , por su
saliente con ranura pasante, en un espacio dejado entre ambos acoplamientos.
El mecanismo posee un subconjunto denominado de Posicionamiento con un componente de posición (17) cuyo cuerpo posee dos huecos, uno de ellos tiene introducido en su interior un muelle de torsión (19) , ambos componentes se sobreponen en un extremo de la pieza de fijación (4) para ser ajustados con el tomillo de fijación (13) permitiendo la rotación del componente de posición alrededor del tomillo y el extremo de la pieza de fijación. En el airo hueco del componente de posición se ajusta a presión un rodamiento de agujas (22) e interiormente a este una pieza denominada componente alojamiento (18) cuya forma obedece a su inserción en el rodamiento de agujas y a un hueco donde se aloja mediante ajuste a presión un rodamiento lineal (21) por el interior del cual se desliza el componente vástago (20) .
El mecanismo también posee un subconjunto denominado Guía/Polea con un componente poli-funcional denominado componente guia (23) cuyo cuerpo tiene un hueco en el que se inserta a presión el componente vástago (20) , en el lado opuesto posee otro hueco donde se introduce el muelle de torsión (24) ya continuación de este hueco una rosca interior donde se ajusta 191 tomillo polea 1 (31) , tiene un saliente que topará con el tope polea (33) para que la 'polea rote adecuadamente y lo que en si es la guía que consiste en un saliente del CUt:trpo del componente con un hueco o ranura pasante de forma curva y alargada, curva cuya trayectoria se define para que cuando el componente posición (17) rola el componente guia (23) se deslice y al tiempo haga rotar al componente alojamiento (18) alrededor del rodamiento de agujas (22) un ángulo determinado y el piñón superior dl3 la polea (27) se encuentre siempre en su alineación inicial. Las orientaciones del husillo (3) y del deslizamiento del componente guía (23) solo permiten el desplazamiento lineal de la tuerca motor.
El rodamienlo axial (30) , eslá siluado en la parte posterior de la placa posterior
de la polea (26) y atravesado por el tomillo polea 1 (31) antes de rascarse este último en el componente guía. El rodamiento axial está protegido de partfculas exteriores por
una lapa plástica (34) .
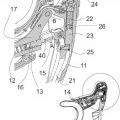
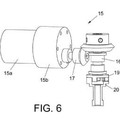
4. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA, según reivindicación 1, se caracteriza por tener un Conjunto Desviador Delantero que utiliza para efectuar los movimientos un actuador lineal eléclrico ele tipo intemo (35) , con un codificador (36) ,
ambos conectados a un control electrónico, y con un husillo (37) cuya posición angular el codificador envía al control electrónico. El actuador se ancla a un extremo de la pieza de fijación (38) , mediante tomillos p43queños (50) y a esta también se anda una cubierta (53) , de forma adaptada a los componentes actuador y Codificador delanteros, lambién con tomillos (51) . El componente de fijación (38) tiene un brazo que se atomilla con el tomillo vertical (47) a la pinza de atornillado (46) y el tornillo horizonlal
(49) que pasa a través de la arandela (48) también se atornilla a la pieza de atornillado.
5. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA, según reivindicación 1, se caracteriza por tener un Conjunto Desviador Delanlero con un mecanismo formado por
una tuerca motor delantera (39) roscada al husillo (37) , tuerca que se ancla al resto del
mecanismo con tornillos (43) que la unen al componente acoplamiento delantero (40)
utilizando arandelas de presión (44) entre ambos componentes. El cuerpo del
acoplamiento delantero es atravesado por el husillo (37) por un hueco pasante y posee otro hueco con una rosca interna donde SEt atornilla el tomillo desviador (42) que fija el
componente desviador (52) y la pieza de ajuste (41) . El diámetro de los agujeros del
componente desviador, donde se acopla la pieza de ajuste, es más grande que el diámetro del tomillo desviador por lo que se permite un pequeño movimiento relativo entre ambos para proporcionar un ajuste adicional del componente desviador antes del apriete del tomillo desviador. El acoplamiento delanlero está también atravesado en un orificio de su cuerpo por una varilla que forma parte de la pieza de fijación (38) y que solo permite el desplazamiento lineal de la tuerca motor. Este conjunto tiene una cubierta elástica adaptada en forma al mecanismo.
6. DISPOSITIVO DE CAMBIO DE DESARROLLO PARA BICICLETAS MOVIDO POR ACTUADORES LINEALES CONTROLADOS ELECTRÓNICAMENTE Y CON PROCESADOR DE RADIO FRECUENCIA, según reivindicación 1, se caracteriza por tener un Conjunto Pulsadores formado por botoneras que contienen interruptores/pulsadores (71) (72) , un cajeado soporte (69) , un cierre (70) , un conjunto tomillo tuerca (73) (74) Yun cableado (75) conectado al control. La botonera para una bicicleta de carretera tienen una abrazadera en el cajeado soporte en parte central de cada arco de agarre, cuerpo este que ha de estar orientado en un ángulo determinado para que se pueda pulsar cada botón dEt forma ergonómica. Para una bicicleta de montaña O urbana las botoneras lienen un cajeado soporte (76) de manera que las abrazaderas se sitúan en la parte superior del cuerpo del cajeado soporte y se puedan pulsar los botones de forma ergonómica. Para una bicicleta de contra-reloj o triatlón las abrazaderas se sitúan en la parte exterior derecha e izquierda de los cuerpos de los cajeados soporte (83) y orientados para poder realizar la pulsación de manera ergonómica.
Patentes similares o relacionadas:
Conjunto de platos para un sistema de transmisión de potencia, del 13 de Junio de 2019, de ZUMA INNOVATION S.L: Conjunto para un sistema de transmision de potencia, conjunto que comprende un primer plato , un segundo plato que tiene un eje comun (E) con el […]
Sistema electrónico de bicicleta, del 9 de Noviembre de 2016, de CAMPAGNOLO S.R.L.: Un cambio de marchas de bicicleta servoasistido electrónicamente, que comprende un desviador de cambio y electrónica de control para manejar […]
Dispositivo de control dual de bicicletas con accionamiento hidráulico, del 6 de Julio de 2016, de ROTOR COMPONENTES TECNOLOGICOS, S.L.: Un dispositivo de control dual de bicicleta que comprende: -una carcasa funda , un primer miembro soporte acoplado al manillar de la bicicleta […]
 Rueda para bicicletas de pedal asistido, del 9 de Marzo de 2016, de C.R.D. Centro Ricerche Ducati Trento S.r.l: Una rueda para bicicletas de pedal asistido, que comprende:
- por lo menos una estructura fija asociable con el marco (T) de una bicicleta (B) que tiene una […]
Rueda para bicicletas de pedal asistido, del 9 de Marzo de 2016, de C.R.D. Centro Ricerche Ducati Trento S.r.l: Una rueda para bicicletas de pedal asistido, que comprende:
- por lo menos una estructura fija asociable con el marco (T) de una bicicleta (B) que tiene una […]
 Dispositivo dual de control de bicicletas con accionamiento hidráulico para un cambio de marchas, del 7 de Octubre de 2015, de ROTOR COMPONENTES TECNOLOGICOS, S.L.: La presente invención se refiere a un dispositivo de control dual de bicicletas con accionamiento hidráulico para un cambio de marchas, de manera que con un solo dispositivo […]
Dispositivo dual de control de bicicletas con accionamiento hidráulico para un cambio de marchas, del 7 de Octubre de 2015, de ROTOR COMPONENTES TECNOLOGICOS, S.L.: La presente invención se refiere a un dispositivo de control dual de bicicletas con accionamiento hidráulico para un cambio de marchas, de manera que con un solo dispositivo […]
Dispositivo de accionamiento eléctrico de cuerno de manillar de un cambio de marchas de bicicleta, del 18 de Febrero de 2015, de CAMPAGNOLO S.R.L.: Dispositivo de accionamiento eléctrico de cuerno de manillar de un cambio de marchas de bicicleta, que […]
 SISTEMA DE CAMBIO DE MARCHA AUTOMÁTICO PARA VEHÍCULOS DE COMBUSTIÓN INTERNA, del 16 de Octubre de 2014, de PRODUCT & PROCESS DEVELOPMENT, S.L: Sistema de cambio de marcha automático para vehículos de combustión interna, del tipo en el que el vehículo incluye una caja de cambios de marcha manual provista de un tambor […]
SISTEMA DE CAMBIO DE MARCHA AUTOMÁTICO PARA VEHÍCULOS DE COMBUSTIÓN INTERNA, del 16 de Octubre de 2014, de PRODUCT & PROCESS DEVELOPMENT, S.L: Sistema de cambio de marcha automático para vehículos de combustión interna, del tipo en el que el vehículo incluye una caja de cambios de marcha manual provista de un tambor […]
 Sistema de cambio de marcha automático para vehículos de combustión interna, del 14 de Octubre de 2014, de PRODUCT & PROCESS DEVELOPMENT, S.L: Sistema de cambio de marcha automático para vehículos de combustión interna, del tipo en el que el vehículo incluye una caja de cambios de marcha manual provista de un tambor […]
Sistema de cambio de marcha automático para vehículos de combustión interna, del 14 de Octubre de 2014, de PRODUCT & PROCESS DEVELOPMENT, S.L: Sistema de cambio de marcha automático para vehículos de combustión interna, del tipo en el que el vehículo incluye una caja de cambios de marcha manual provista de un tambor […]