Aparato y método de simulación virtual para sillas de ruedas y programa de ordenador que implementa el método.
Aparato y método de simulación virtual para silla de ruedas, y programa de ordenador que implementa el método.
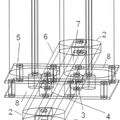
El aparato comprende:
- una estructura de plataforma (P) no inclinable;
- dos parejas de rodillos, uno de ellos motriz (R2, R4), montados en la estructura de plataforma (P);
- unos medios para detectar la posición angular de los rodillos motrices (R2, R4);
- unos medios de accionamiento en giro de los rodillos motrices (R2, R4);
- unos medios de computación y control (C) que simulan la evolución de una silla de ruedas virtual en base a las posiciones angulares detectadas y que controlan a los medios de accionamiento; y
- unos medios de retención que comprenden únicamente a unos rodillos locos (R1, R3) de las parejas de rodillos, dimensionados y dispuestos para encajar entre los rodillos de cada pareja una rueda motriz (D, L) de la silla de ruedas, reteniéndola.
El método está adaptado para implementar las funcionalidades del aparato, y el programa de ordenador para implementar el método.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201300253.
Solicitante: UNIVERSITAT DE VALENCIA.
Nacionalidad solicitante: España.
Inventor/es: FERNANDEZ MARIN,MARCOS, RIERA LÓPEZ,José Vicente, PÉREZ AIXENDRI,Manolo, CASAS YRURZUM,Sergio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A63B23/00 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63B MATERIAL PARA LA EDUCACION FISICA, GIMNASIA, NATACION, ESCALADA O ESGRIMA; JUEGOS DE PELOTA; MATERIAL DE ENTRENAMIENTO (aparatos para gimnasia pasiva, masaje A61H). › Aparatos de ejercicio especialmente adaptados a partes determinadas del cuerpo (A63B 22/00 tiene prioridad; aspectos de resistencia A63B 21/00; controles eléctricos o electrónicos de los mismos A63B 24/00; dispositivos para ejercitar o fortificar los dedos o los brazos para la enseñanza de la manipulación de teclados G09B, p. ej. G09B 15/06).
- G01M1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › Ensayo del equilibrado estático o dinámico de máquinas o estructuras.
Fragmento de la descripción:
Aparato v método de simulación virtual para silla de ruedas, v programa de ordenador que imolementa el método
Sector de la técnica
La presente invención concierne en general, en un primer aspecto, a un aparato de simulación virtual para silla de ruedas, que comprende unos actuadores controlados mediante un sistema de computación, de los que se extrae información para que el minusválido se mueva en un entorno virtual, a la vez que se le devuelve al usuario la sensación de fuerza ("feedback") que debería sentir en función de su situación en el entorno virtual, y más particularmente a un aparato que incluye unos medios de retención que permiten retener a la silla de ruedas sobre la estructura de soporte sin la necesidad de fijarla a la misma.
Un segundo aspecto de la invención concierne a un método de simulación virtual para silla de ruedas, adaptado para implementar parte de las funcionalidades del aparato del primer aspecto.
Un tercer aspecto de la invención concierne a un programa de ordenador adaptado para implementar el método del segundo aspecto.
Estado de la técnica anterior
Son conocidos aparatos de simulación virtual para silla de ruedas que permiten que los usuarios en silla de ruedas puedan acceder a entornos hasta ahora limitados para ellos. De esta manera, mediante su uso, a la hora de realizar el diseño arquitectónico de cualquier obra o construcción pública, por ejemplo se puede realizar un estudio sobre la accesibilidad del edificio para personas minusválidas. De igual manera, se pueden realizar estudios sobre planes de emergencia/evacuación en empresas que cuenten con personas minusválidas, edificios donde se van a desarrollar actividades públicas, etc. Dentro de estas u otras clases de simulaciones, uno de los factores más importantes es que el usuario se sienta lo más inmerso posible en ellas. Es por ello que la mejor forma de conseguir esto es permitiendo que los usuarios se muevan de manera natural.
En el artículo "Enhancement of a virtual reality wheelchair simulator to inelude qualitative and quantitative performance metrics", Assist. Technol. 2010 Spring; 22(1):20-31, doi: 10.1080/10400430903520223, Harrison CS, Grant PM, Conway BA, se describe un aparato de simulación virtual para silla de ruedas que comprende los elementos incluidos en el preámbulo de la reivindicación 1 de la presente invención, en particular dos rodillos motrices montados en una plataforma sobre los cuales se apoyan
las ruedas motrices de la silla de ruedas real, así como unos servomotores de corriente continua conectados a los ejes de los rodillos motrices a través de sendas cadenas cinemáticas que incluyen unos embragues y unas correas de transmisión.
El aparato descrito en dicho artículo incluye también unos detectores de posición angular acoplados a los ejes de los rodillos motrices, en particular unos detectores rotatorios de 512 pulsos, con el fin de que un sistema de computación simule la evolución de una silla de ruedas virtual dentro de un entorno virtual en base a los valores de posición angular detectados.
Por lo que respecta al retorno físico, o "feedback", proporcionado al usuario en función de la simulación, éste es llevado a cabo en el aparato descrito en este artículo variando el par de los rodillos motrices, activando o desactivando el freno de los mismos y/o el embrague, en función de los trayectos u objetos virtuales por los que circula o con los que se enfrente la silla de ruedas virtual.
No se propone realizar dicho "feedback" únicamente variando el par de los rodillos, es decir sin la utilización y control de otra clase de elementos, en este caso un embrague y un freno, ni realizar tal variación del par mediante un control en par.
El aparato propuesto en este artículo no permite un uso autónomo del mismo por parte del usuario de la silla de ruedas, necesitando de la ayuda de otra persona, ya que éste incluye unos medios de retención de la silla de ruedas a la plataforma de soporte que incluyen unos tirantes que se fijan a la plataforma en cuatro puntos de anclaje dispuestos en la misma, operación la cual no puede realizar el propio usuario de la silla, y que es relativamente compleja ya que debe conseguirse que las ruedas motrices de la silla se mantengan en equilibrio sobre los rodillos.
Por otra parte, en la solicitud Internacional WO 2011/004114 A1 se propone también un aparato de simulación virtual para silla de ruedas que en este caso incluye dos parejas de rodillos, uno motriz y uno loco, dispuestas una tras la otra en un sentido longitudinal a la plataforma de soporte de las mismas, no proporcionándose la disposición de rodillos independientes para cada una de las ruedas motrices de la silla de ruedas.
Debido a que la plataforma de soporte del aparato descrito en dicha solicitud Internacional es inclinable y a que los rodillos entre los cuales se disponen las ruedas motrices de la silla de ruedas no están configurados ni dispuestos para llevar a cabo la retención de la silla de ruedas en la plataforma, el aparato incluye unos medios de retención que fijan a la silla de ruedas a la plataforma, por lo que, igual que en el aparato descrito en el artículo anteriormente citado, el usuario de la silla de ruedas
necesita de la ayuda de otra persona para realizar tal fijación, y para deshacerla cuando éste desea abandonar el aparato.
En esta solicitud internacional se propone generar un retorno de fuerza en correspondencia con la evolución en el entorno virtual al usuario de la silla de ruedas, es decir el anteriormente denominado "feedback", generando, mediante un motor acoplado al eje del rodillo motriz a través de una correa, una resistencia a la rotación del mismo. En WO 2011/004114 A1 no se indica qué clase de control se utiliza para generar tal resistencia a la rotación.
El aparato propuesto en esta solicitud internacional puede ser utilizado con sillas de ruedas diferentes, en cuanto al diámetro de sus ruedas motrices, para lo cual proponen un mecanismo de regulación de la distancia transversal existente entre los rodillos de cada pareja de rodillos. Tal mecanismo es manual y requiere, por tanto, de la intervención de un operario de manera previa a la utilización del aparato con una silla de ruedas determinada, lo cual resulta engorroso, poco eficiente y, sobre todo, dificulta aún más la utilización del aparato de manera autónoma por parte el usuario de la silla de ruedas, no pudiendo prescindir éste de la ayuda de otra persona para su utilización, por las dos razones expuestas: la necesidad de fijación de la silla de ruedas a la plataforma y la necesidad de adaptación de la distancia transversal entre los rodillos para adecuarse a las ruedas de su silla de ruedas.
Por otra parte, el aparato descrito en WO 2011/004114 A1, a diferencia del propuesto en el artículo citado anteriormente, no podría ser utilizado en un sistema CAVE, acrónimo de los términos en inglés "Cave Automatic Virtual Environment" (Entorno Virtual Automático tipo Cueva), ya que al desplazarse la plataforma en inclinación se distorsionaría la imagen proyectada sobre el suelo.
Los presentes inventores no conocen ningún aparato de simulación virtual para silla de ruedas que permite su uso de manera autónoma por parte del usuario de la silla de ruedas, sin requerir de la ayuda de otra persona para fijar a la silla a la plataforma del aparato, ni ninguno que pueda utilizarse para cualquier tipo silla de ruedas de manera autónoma, sin necesidad de adaptación por parte de un operario.
Explicación de la invención
Resulta necesario ofrecer una alternativa al estado de la técnica que cubra las lagunas halladas en el mismo, mediante la aportación de un aparato que permita prescindir de los elementos de fijación de la silla de ruedas a la plataforma incluidos en las propuestas conocidas, permitiendo así el uso del aparato de manera autónoma por el propio usuario de la silla de ruedas.
Con tal fin, la presente invención concierne a un aparato de simulación virtual para silla de ruedas, que comprende:
- unos medios de soporte de una silla de ruedas real que incluyen una estructura de soporte no inclinadle;
- dos rodillos motrices, alineados y montados en dicha estructura de soporte con posibilidad de giro respecto a la misma;
- unos medios de retención para retener a la silla de ruedas real sobre la estructura de soporte apoyando cada una de sus ruedas motrices sobre uno de dichos rodillos motrices, evitando que la silla de ruedas se desplace en la realidad pero permitiendo el giro de sus ruedas motrices;
- unos medios de detección de posición angular dispuestos y previstos para detectar la posición angular de cada uno de los rodillos...
Reivindicaciones:
1.- Aparato de simulación virtual para silla de ruedas, que comprende:
- unos medios de soporte de una silla de ruedas real que incluyen una estructura de soporte no inclinable;
- dos rodillos motrices (R2, R4), alineados y montados en dicha estructura de soporte con posibilidad de giro respecto a la misma;
- unos medios de retención para retener a la silla de ruedas real sobre la estructura de soporte apoyando cada una de sus ruedas motrices (D, L) sobre uno de dichos rodillos motrices (R2, R4), evitando que la silla de ruedas se desplace en la realidad pero permitiendo el giro de sus ruedas motrices (D, L);
- unos medios de detección de posición angular dispuestos y previstos para detectar la posición angular de cada uno de los rodillos motrices (R2, R4);
- unos medios de accionamiento conectados mecánicamente a cada uno de los rodillos motrices (R2, R4) para hacerlos girar; y
- unos medios de computación y control (C) comunicados con dichos medios de detección de posición angular, para recibir los valores de posición angular detectados, y con los medios de accionamiento, para controlarlos, y previstos también para simular, y mostrar en unos medios de visualización (V), la evolución de una silla de ruedas virtual dentro de un entorno virtual en base a al menos los valores de posición angular detectados;
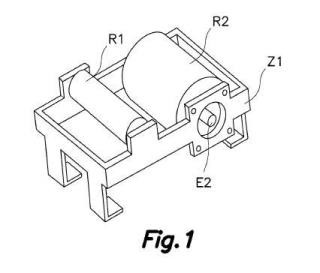
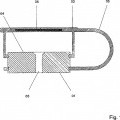
estando el aparato caracterizado porque dichos medios de retención comprenden únicamente sendos rodillos locos (R1, R3), montados con posibilidad de giro en la estructura de soporte, cada uno de los cuales está dimensionado y dispuesto con relación a uno de los rodillos motrices (R2, R4), en paralelo y a una distancia transversal determinada respecto al mismo, para encajar entre los rodillos (R1-R2; R3- R4) de cada pareja formada por un rodillo loco (R1, R3) y uno motriz (R2, R4) una respectiva rueda motriz (D, L) de la silla de ruedas real, evitando que la silla de ruedas se salga del hueco entre los rodillos (R1-R2; R3-R4), al menos en dirección a los rodillos locos (R1, R3).
2.- Aparato según la reivindicación 1, caracterizado porque los rodillos (R1-R2; R3-R4) de cada pareja de rodillos tienen diámetros diferentes entre sí, con el fin de sustentar entre ambos ruedas motrices (D1, D2, D3; L1, L2, L3) de sillas de ruedas reales de diferentes diámetros sin variar dicha distancia transversal determinada.
3.- Aparato según la reivindicación 2, caracterizado porque dicha distancia transversal determinada es una distancia fija.
4.- Aparato según la reivindicación 2 ó 3, caracterizado porque el rodillo de mayor diámetro es el rodillo motriz (R2, R4).
5.- Aparato según una cualquiera de las reivindicaciones anteriores 2 a 4, caracterizado porque el eje (E2, E4) del rodillo de mayor diámetro (R2, R4) se encuentra dispuesto, en relación a una superficie de soporte, a una altura menor que el eje (E1, E3) del rodillo de menor diámetro (R1, R3).
6.- Aparato según una cualquiera de las reivindicaciones anteriores, caracterizado porque los medios de accionamiento comprenden sendos servomotores (S1, S2) cada uno de los cuales está conectado directamente al eje (E2, E4) de uno de los rodillos motrices (R2, R4), incluyendo cada servomotor (S1, S2) al menos un detector de posición angular, de dichos medios de detección de posición angular, dispuesto para detectar la posición angular del rodillo motriz (R2, R4) al que se encuentra conectado.
7.- Aparato según la reivindicación 6, caracterizado porque dichos servomotores (S1, S2) funcionan con corriente alterna e incluyen sensores de velocidad para determinar el par de giro de los rodillos (R2, R4) a los que se encuentran conectados, y porque el aparato comprende sendos variadores de frecuencia (F1, F2) en conexión con los servomotores (S1, S2) y con los medios de computación y control (C) para controlar el par de giro de los rodillos (R2, R4) realizando un control en par.
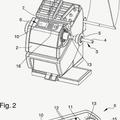
8.- Aparato según la reivindicación 7, caracterizado porque dicha estructura de soporte es una estructura de plataforma (P) prevista para disponerse sobre dicha superficie de soporte, y que incluye una plataforma (Ps), o pared superior, que tiene al menos una abertura pasante por donde sobresalen parcialmente los rodillos de una o ambas de las parejas de rodillos (R1, R2; R3, R4).
9.- Aparato según la reivindicación 8, caracterizado porque dicha plataforma (Ps) tiene dos aberturas pasantes (A1, A2), por cada una de las cuales sobresalen parcialmente los rodillos de una de las parejas de rodillos (R1, R2; R3, R4).
10.- Aparato según la reivindicación 8 ó 9, caracterizado porque comprende sendas bases de soporte (Z1, Z2), en cada una de las cuales se encuentran montados los rodillos de una de las parejas de rodillos (R1, R2; R3, R4) con posibilidad de giro respecto a la misma, estando dichas bases de soporte (Z1, Z2) montadas en el interior de dicha estructura de plataforma (P).
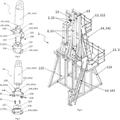
11.- Aparato según una cualquiera de las reivindicaciones anteriores, caracterizado porque dichos medios de visualización (V) están incluidos en el aparato e incluyen un sistema de proyección de entorno de realidad virtual inmersiva, o sistema CAVE, que proyecta imágenes en las paredes, suelo y techo que rodean al usuario.
12.- Método de simulación virtual para silla de ruedas, que comprende utilizar el aparato según una cualquiera de las reivindicaciones anteriores para, mediante dichos medios de computación y control:
- simular, y mostrar en unos medios de visualización (V), la evolución de una silla de ruedas virtual dentro de un entorno virtual en base a al menos los valores de posición angular detectados con los medios de detección angular; y
- controlar a los medios de accionamiento en función de al menos el desarrollo de dicha simulación, con el fin de proporcionar al usuario de la silla de ruedas real una respuesta a su interacción con el entorno virtual mediante la variación del par de giro de los rodillos motrices (R2, R4) conectados a los medios de accionamiento.
13.- Método según la reivindicación 12, caracterizado porque comprende llevar a cabo dicho control de los medios de accionamiento mediante un control en par.
14.- Método según la reivindicación 13, caracterizado porque comprende controlar a los medios de accionamiento para ejercer, en los rodillos (R2, R4) de ambas parejas de rodillos, un par de giro de sentido contrario a la dirección de avance de la silla de ruedas real, al colisionar la silla de ruedas virtual con un objeto virtual o al circular la misma por una rampa o pendiente de subida, y para ejercer un par de giro con el mismo sentido que la dirección de avance de la silla de ruedas real, para simular el efecto que la inercia tendría en el avance de la silla de ruedas en un entorno real.
15.- Método según la reivindicación 13 ó 14, caracterizado porque comprende controlar a los medios de accionamiento para ejercer, en los rodillos motrices (R2, R4) de ambas parejas de rodillos, un par de giro elevado constante a una velocidad cero, o próxima a cero, para permitir tanto la entrada como la salida de la silla de ruedas del hueco entre los rodillos (R1-R2; R3-R4) pasando por encima de los rodillos motrices (R2, R4).
16.- Método según la reivindicación 13, 14 ó 15, caracterizado porque comprende llevar a cabo dicho control de los medios de accionamiento en función de los valores de unos parámetros de entrada relativos al menos a información sobre los rodillos motrices (R2, R4) y/o la silla de ruedas real y/o el usuario de la misma.
17.- Método según la reivindicación 16, caracterizado porque dichos parámetros de entrada incluyen al menos algunos de los siguientes parámetros: radio de los rodillos motrices, distancia transversal entre las ruedas motrices de la silla de ruedas real, radio de las mismas, tipo de silla de ruedas, manual o eléctrica, coeficiente de rozamiento, gravedad, masa del usuario, velocidad máxima de los motores, factor de servicio de los servomotores, límite de velocidad de seguridad, modo colisión automático, fuerza modo
colisión automático y tiempo de aplicación de fuerza de colisión, o una combinación de los mismos.
18.- Método según la reivindicación 16 ó 17, caracterizado porque al menos parte de dichos parámetros son configurables.
5 19.- Método según una cualquiera de las reivindicaciones 11 a 18, caracterizado
porque comprende, mediante dichos medios de computación y control, determinar la orientación de la silla de ruedas virtual en función del ángulo de rotación de cada una de las ruedas motrices (D, L) de la silla de ruedas real, a partir de los valores de detección de posición angular, y de sus parámetros dimensionales.
10 20.- Programa de ordenador que incluye instrucciones que cuando son
ejecutadas en un ordenador implementan el método según una cualquiera de las reivindicaciones 12 a 19 por lo que se refiere al cálculo y generación de señales de simulación a suministrar a dichos medios de visualización, y al cálculo y generación de señales de control a suministrar a los medios de accionamiento.
Patentes similares o relacionadas:
 Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]
Sistema y método de control de prueba de carga de unidad de elevación de máquina de soporte de vehículos, del 25 de Septiembre de 2019, de CRRC Qingdao Sifang Rolling Stock Research Institute Co., Ltd: Un sistema de prueba y control de prueba de carga de una unidad de elevación de elevador de vehículos, adecuado para su uso para someter a prueba una unidad […]
Una máquina para el equilibrado de las ruedas de los vehículos, del 27 de Abril de 2016, de SICAM S.R.L.: Una máquina de equilibrado para el equilibrado de las ruedas, que comprende una estructura de soporte para soportar los medios de agarre y rotación […]
 Máquina de equilibrado para el equilibrado de las ruedas de un vehículo, del 30 de Marzo de 2016, de SICAM S.R.L.: Una máquina de equilibrado adaptada al equilibrado de las ruedas de un vehículo, que comprende una estructura de soporte adaptada para soportar los […]
Máquina de equilibrado para el equilibrado de las ruedas de un vehículo, del 30 de Marzo de 2016, de SICAM S.R.L.: Una máquina de equilibrado adaptada al equilibrado de las ruedas de un vehículo, que comprende una estructura de soporte adaptada para soportar los […]
 Método de detección de combustión anormal para motores de combustión interna, del 7 de Junio de 2012, de INSTITUT FRANCAIS DU PETROLE: Método de detección de combustión anormal en la cámara de combustión de al menos un cilindro de un motor de combustión interna […]
Método de detección de combustión anormal para motores de combustión interna, del 7 de Junio de 2012, de INSTITUT FRANCAIS DU PETROLE: Método de detección de combustión anormal en la cámara de combustión de al menos un cilindro de un motor de combustión interna […]
SISTEMA PARA ENSAYOS MECANICOS DEL CONJUNTO EJE DE BAJA, BASTIDOR DELANTERO Y CORONA DE GIRO DE UN AEROGENERADOR., del 16 de Abril de 2007, de FUNDACION CENTRO DE TECNOLOGIAS AERONAUTICAS: Sistema para ensayos mecánicos del conjunto eje de baja, bastidor delantero y corona de giro de un aerogenerador, que permite simular de forma simultánea […]
JUEGO DE CONTRAPESOS PARA PRUEBAS DE CARGA EN GRUAS TORRE., del 1 de Agosto de 2004, de VALLINA Y QUINCE, S.L.: 1. Juego de contrapesos para pruebas de carga en grúas torre, que esencialmente se caracteriza porque comprende un contrapeso base y una serie […]
 MARCACIÓN DE PUNTOS DE MEDIDA PARA EL RECONOCIMIENTO AUTOMÁTICO DE LOS MISMOS EN UN SISTEMA DE VIGILANCIA DE ESTADO, del 31 de Mayo de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Marcación de un punto de medida para el reconocimiento automático del mismo en un sistema de vigilancia de estado, caracterizada porque comprende una placa que puede […]
MARCACIÓN DE PUNTOS DE MEDIDA PARA EL RECONOCIMIENTO AUTOMÁTICO DE LOS MISMOS EN UN SISTEMA DE VIGILANCIA DE ESTADO, del 31 de Mayo de 2011, de SCHAEFFLER TECHNOLOGIES GMBH & CO. KG: Marcación de un punto de medida para el reconocimiento automático del mismo en un sistema de vigilancia de estado, caracterizada porque comprende una placa que puede […]
 ACTUADOR REGULABLE EN FUERZA SIN RESTRICCION DE MOVIMIENTO, COMPUESTO DE DOS MOTORES ACOPLADOS MEDIANTE UN MECANISMO DIFERENCIAL, PARA SU USO EXPERIMENTAL EN MODELO FISICO A ESCALA Y EN PROTOTIPO, del 16 de Febrero de 2010, de ECHEGOYEN MARTIN,TOMAS JOSE
AMOROS SERRET,JOSE RAMON: 1. Actuador regulable en fuerza sin restricción de movimiento, compuesto de dos motores acoplados mediante un mecanismo diferencial, para su uso experimental en modelo físico […]
ACTUADOR REGULABLE EN FUERZA SIN RESTRICCION DE MOVIMIENTO, COMPUESTO DE DOS MOTORES ACOPLADOS MEDIANTE UN MECANISMO DIFERENCIAL, PARA SU USO EXPERIMENTAL EN MODELO FISICO A ESCALA Y EN PROTOTIPO, del 16 de Febrero de 2010, de ECHEGOYEN MARTIN,TOMAS JOSE
AMOROS SERRET,JOSE RAMON: 1. Actuador regulable en fuerza sin restricción de movimiento, compuesto de dos motores acoplados mediante un mecanismo diferencial, para su uso experimental en modelo físico […]