ANDADOR ÓRTICO CON MOTORES Y ELECTRÓNICA DE ACTUACIÓN.
1. Andador órtico con motores y electrónica de actuación caracterizado por estar compuesto de:
a) Una estructura con ruedas que proporciona estabilidad e incluye unos motores para su movilidad.
b) Un arnés que integra unos bitutores para soportar al usuario y proporciona la movilidad de los miembros inferiores por medio de otros motores.
c) Una electrónica que proporciona funciones de control.
2. Andador órtico con motores y electrónica de actuación, según la reivindicación 1, caracterizado porque dispone de una estructura que soporta de forma estable el arnés.
3. Andador órtico con motores y electrónica de actuación, según la reivindicación 1, caracterizado por comprender barras telescópicas que regulan la altura.
4. Andador órtico con motores y electrónica de actuación, según la reivindicación 1, caracterizado por integrar una electrónica de control que permite actuar sobre el entorno en función del software instalado, así como el control de los motores que permiten mover la estructura y los miembros inferiores del usuario.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201331245.
Solicitante: UNIVERSIDAD DE ALCALA..
Nacionalidad solicitante: España.
Inventor/es: MALDONADO BASCÓN,SATURNINO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47D13/04 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47D MOBILIARIO ESPECIALMENTE ADAPTADO PARA NIÑOS (bancos o pupitres escolares A47B 39/00, A47B 41/00). › A47D 13/00 Otros muebles para salas de lactantes (sillas de aseo auxiliares o transportables para niños A47K 13/06). › Aparatos para enseñar a los niños a caminar; Artículos para la marcha o el paseo de los bebés (apoyos para caminar provistos de ruedas para enfermos o discapacitados A61H 3/04).
- A61H3/04 A […] › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61H APARATOS DE FISIOTERAPIA, p. ej. DISPOSITIVOS PARA LOCALIZAR O ESTIMULAR LOS PUNTOS EN DONDE SE LOCALIZAN LOS CUERPOS; RESPIRACION ARTIFICIAL; MASAJE; DISPOSITIVOS DE BAÑO PARA USOS TERAPEUTICOS O HIGIENICOS PARTICULARES O PARA PARTES DETERMINADAS DEL CUERPO (electroterapia, magnetoterapia, radioterapia, terapia por ultrasonidos A61N). › A61H 3/00 Aparatos para ayudar a caminar a los enfermos o a los inválidos (aparatos para enseñar a caminar a los bebés A47D 13/04). › Apoyos provistos de ruedas para ayudar a caminar a enfermos e inválidos.
Descripción:
ANDADOR ÓRTICO CON MOTORES Y ELECTRÓNICA DE ACTUACIÓN.
OBJETO DE LA INVENCIÓN
La presente invención se refiere a un dispositivo, en concreto un andador, para la ayuda a la movilidad de personas que tienen seriamente afectada su movilidad. El andador es una estructura externa que tiene unos motores que actúan sobre los miembros inferiores del usuario y sobre las ruedas de dicho andador de forma que permite los movimientos a personas que no tienen dicha capacidad. Además, tiene el complemento de una electrónica que permite unas acciones básicas que pueden ser configuradas.
El andador está compuesto por tres partes diferenciadas: una estructura con ruedas que proporciona estabilidad al usuario, junto con los motores correspondientes para desplazar esta estructura; un arnés que tiene integrados unos bitutores donde se soporta el niño, y unos motores en las articulaciones de los miembros inferiores, y, por último, una electrónica que proporciona funciones añadidas, así como el control de los movimientos de los motores para realizar los desplazamientos de forma correcta.
SECTOR DE LA TÉCNICA
El andador descrito en esta memoria comparte técnicas propias de la mecánica dado que se trata de un diseño mecánico en cuya fabricación intervienen diferentes procesos de mecanizado y técnicas de desarrollo electrónico, que complementan la funcionalidad principal del mismo. Por otro lado, supone la utilización de electrónica con propósito específico para el control del mismo.
ESTADO DE LA TÉCNICA
Son varios los sistemas de exo-esqueleto que se encuentran disponibles en el mercado, todos ellos suponen unos sistemas de estabilización muy complicados debido a que no utilizan ningún soporte que asegure esta estabilidad.
Uno de ellos es el exo-esqueleto desarrollado por eksobionics, http://http://eksobionics.com/, donde el usuario tiene un arnés en los miembros inferiores y una especie de mochila en la que se alojan las baterías, US2013/0231595 A1.
La investigación en entornos militares y universitarios también proporciona un buen número de referencias, pero ninguna de ellas utiliza una estructura externa al arnés que proporcione estabilidad. El desarrollo inicial en la Universidad de Tsukuba del HAL (HybridAssistiveLeg) se comercializa ahora a través de Cyberdyne (Tsukuba) , www.cyberdyne.jp. El robot WEAR (Wearable Energetically Autonomous Robot) fue desarrollado por Sarcos Research Corporation bajo un programa de DARPA (Defense Advanced Research Projects Agency) .
DESCRIPCIÓN DE LA INVENCIÓN
El dispositivo descrito en esta memoria consta de tres partes diferenciadas.
La primera parte del dispositivo consiste en una estructura con ruedas motorizadas que proporcionan estabilidad y movilidad a la estructura. La propuesta supone un proceso de fabricación mayoritariamente con piezas planas, lo que supone una importante mejora para la fabricación, dado que permite la producción en serie mediante procedimientos de corte por agua o láser.
La segunda parte de este dispositivo será un arnés que llevará unas barras articuladas que permitan los movimientos de pies, piernas y caderas y que soportará en buena parte del peso del usuario. Las articulaciones están motorizadas de forma que se pueda realizar de forma autónoma el movimiento más parecido a la marcha humana.
La tercera parte del dispositivo hace referencia a la electrónica añadida al andador y que permite diferentes configuraciones. Por ejemplo, se incluye un altavoz inalámbrico que permite dar mensajes o música a voluntad. La parte principal de la electrónica es la dedicada al control del movimiento que se incluye en el dispositivo, junto con las baterías para la electrónica y motores.
DESCRIPCIÓN DE LOS DIBUJOS
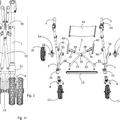
La siguiente descripción pretende dar una idea más clara del funcionamiento del dispositivo. En la figura 1 se muestra la vista delantera del andador, mientras que la figura 2 muestra la parte trasera.
MODO DE REALIZACIÓN
El andador está compuesto por tres partes. Una estructura con ruedas (1) , las ruedas delanteras (2) están montadas sobre una horquilla que facilita su maniobrabilidad. La estructura permite un pequeño movimiento basculante regulado por un amortiguador (3) cuyo émbolo se configura con diferentes posiciones iniciales utilizando la parte roscada final del amortiguador (4) que permite su regulación.
El andador se puede regular según la altura del usuario con una barra vertical (5) , y también se puede hacer algo más largo para aumentar su estabilidad con la extensión delantera (6) . La estructura lleva además una barra delantera (7) donde el usuario podrá apoyar las manos y otra en la parte trasera, asa (8) , que permite a un adulto guiar al niño.
La segunda parte es un arnés que viste el niño y el cual tiene un soporte (9) donde queda la espalda, del que salen unos brazos (10) que rodean al niño por la cadera y de la que cuelgan unos bitutores (11) que se fijan a las piernas. Estos bitutores acaban en unos soportes (12) que se fijan al calzado y unas extensiones (13) en la parte superior que permiten dar mayor rigidez al niño en la zona del tronco. Todos estos elementos están diseñados para permitir que se adapten a la altura del niño en su crecimiento.
Por último, en la estructura se incluyen las baterías y la electrónica de control (14) . Sobre la barra delantera (7) se colocan unos pulsadores (15) que permiten operar con la electrónica. Las ruedas traseras (16) de la estructura son las que permitirán desplazar la estructura, y unos motores en las articulaciones (17) permitirán los movimientos de las piernas.
La realización considerada más eficiente consiste en maximizar la piezas que serán cortadas por algún mecanismo de corte ágil como puede ser corte por agua o por láser, por ello la mayoría de las piezas son planas y con prácticamente nula mecanización posterior. Además de estas piezas planas hay algunos elementos que son tubos macizos o huecos, pero estándar, que sólo requieren de un corte y los correspondientes orificios para encajar las piezas. Sin embargo hay algunas piezas que obligan a un mecanizado extra, como son el soporte de la espalda, para dar un diseño ligero y a la vez robusto, y las piezas que permiten bascular ligeramente a la estructura y que llevan unos rodamientos en su interior y por tanto es necesario mecanizar los espacios para alojarlos. Lo mismo ocurre con las piezas de las articulaciones de los bitutores, y las horquillas de las ruedas que también llevan unos rodamientos. Por tanto, la realización que se ha buscado es la que permita una producción muy económica que se obtiene por la producción casi completa con el corte de piezas planas.
Reivindicaciones:
1) Andador órtico con motores y electrónica de actuación caracterizado por estar compuesto de: 5 a) Una estructura con ruedas que proporciona estabilidad e incluye unos motores para su movilidad. b) Un arnés que integra unos bitutores para soportar al usuario y proporciona la movilidad de los miembros inferiores por medio de otros motores. c) Una electrónica que proporciona funciones de control.
2) Andador órtico con motores y electrónica de actuación, según la reivindicación 1, caracterizado porque dispone de una estructura que soporta de forma estable el arnés.
3) Andador órtico con motores y electrónica de actuación, según la reivindicación 1, 15 caracterizado por comprender barras telescópicas que regulan la altura.
4) Andador órtico con motores y electrónica de actuación, según la reivindicación 1, caracterizado por integrar una electrónica de control que permite actuar sobre el entorno en función del software instalado, así como el control de los motores que permiten mover la estructura y los miembros inferiores del usuario.
Figura 1
Figura 2
Patentes similares o relacionadas:
ANDADOR, del 27 de Marzo de 2020, de UNIVERSIDAD POLITECNICA DE MADRID: Andador para uso tanto en el interior como en el exterior de una vivienda, que está dotado de un primer y un segundo medio de agarre para permitir el apoyo […]
Disposición de trinquete para un dispositivo de apoyo a la movilidad, del 12 de Febrero de 2020, de Rebotec Rehabilitationsmittel GmbH: Disposición de trinquete para un dispositivo de apoyo a la movilidad, en particular para un larguero regulable en altura de un dispositivo de apoyo a la movilidad, con […]
Ayuda para caminar con ruedas que comprende un peso que ejerce una fuerza hacia arriba, del 22 de Enero de 2020, de Medical Robots: Una ayuda para caminar adecuada para soportar a los pacientes para ser asegurada al lado posterior de un paciente, que comprende: - un bastidor soportado solamente […]
 Soporte o portador con ruedas abatible, del 30 de Octubre de 2019, de Trionic Sverige AB: Soporte o portador con ruedas propulsado a mano abatible, tal como como un andador tipo rollator, andador, silla de paseo o sillita, que comprende:
[…]
Soporte o portador con ruedas abatible, del 30 de Octubre de 2019, de Trionic Sverige AB: Soporte o portador con ruedas propulsado a mano abatible, tal como como un andador tipo rollator, andador, silla de paseo o sillita, que comprende:
[…]
Recipiente de productos para dispositivo de ayuda a la marcha y dispositivo de ayuda a la marcha asociado, del 14 de Octubre de 2019, de UNIVERSIDAD DE LAS PALMAS DE GRAN CANARIA: 1. Recipiente de productos para dispositivo de ayuda a la marcha que comprende medios de fijación al dispositivo de ayuda a […]
Estructura de soporte, del 11 de Septiembre de 2019, de Hexowheel: Una estructura de soporte que comprende: - una parte de recepción de carga , 5 diseñada para recibir una carga a transportar o asistir durante el movimiento; […]
Andador, del 14 de Agosto de 2019, de ORMESA S.R.L: Andador que comprende un bastidor base soportado por ruedas y barras de soporte montadas en el bastidor base para soportar, a […]
APARATO PARA ESTIMULAR EL GATEO EN BEBÉS, del 8 de Agosto de 2019, de UNIVERSIDAD TECNOLÓGICA DE PANAMÁ (UTP): La presente invención se relaciona al campo de los muebles especialmente adaptados para niños, más específicamente otros muebles para bebés y en específico proporciona un aparato […]