Dispositivo de amortiguación por fricción pilotada.
Un dispositivo amortiguador (3) caracterizado por que comprende:
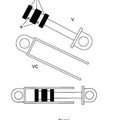
- un primer miembro (30) que se extiende axialmente según un eje longitudinal;
- un segundo miembro (40) que se extiende axialmente según el mismo eje longitudinal, siendo los dos miembros guiados en traslación uno con relación al otro;
- un elemento de frotamiento (21) que se extiende entre los dos miembros y que los une completamente entre sí por fricción en traslación axial para cualquier esfuerzo inferior a un umbral 's' tendiendo dicho esfuerzo a crear un desplazamiento relativo de los dos miembros en traslación según dicho eje longitudinal;
- un dispositivo de ajuste (50) que comprende un accionador piezoeléctrico y que permite regular el valor de dicho umbral;
- medios (51), distantes del primer (30) y del segundo miembro (40), aptos para pilotar la presión de contacto del elemento de frotamiento (21, 42) sobre la superficie de al menos uno de los miembros, en una región que comprende una presión de contacto nula.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/053199.
Solicitante: EUROPEAN AERONAUTIC DEFENCE AND SPACE COMPANY EADS FRANCE.
Nacionalidad solicitante: Francia.
Dirección: 37 BLD DE MONTMORENCY 75016 PARIS FRANCIA.
Inventor/es: PETITJEAN,Benoit.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16F7/08 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 7/00 Amortiguadores de vibraciones; Amortiguadores de choques (utilizando un fluido F16F 5/00, F16F 9/00; especiales para sistemas rotativos F16F 15/10). › con superficies de fricción con un desplazamiento rectilíneo a lo largo de la otra (F16F 7/01 tiene prioridad).
- F16F7/09 F16F 7/00 […] › en amortiguadores del tipo cilindro-pistón.
PDF original: ES-2471073_T3.pdf
Fragmento de la descripción:
Dispositivo de amortiguaciïn por fricciïn pilotada El invento se refiere a un dispositivo semi-activo de amortiguaciïn utilizado para amortiguar las vibraciones en desplazamiento relativo de dos elementos entre los cuales estï fijado dicho dispositivo.
Tal dispositivo es utilizado por ejemplo en el dominio aeronïutico para la amortiguaciïn de las vibraciones de los motores o de los depïsitos de lanzadores o para la amortiguaciïn entre la estructura portadora de un satïlite de observaciïn y de los equipos de punterïa.
La tïcnica anterior divulga en el documento EP 1 277 984, un amortiguador por fricciïn para la amortiguaciïn de las vibraciones en movimiento relativo de traslaciïn entre dos piezas. Tal amortiguador por fricciïn se comporta como una uniïn rïgida o elïstica para desplazamientos relativos, entre las dos piezas, inferiores a un umbral dado, luego disipa una energïa proporcional al desplazamiento relativo entre estas dos piezas mïs allï de este umbral. Las caracterïsticas de amortiguaciïn de tal amortiguador son por tanto funciones de este umbral. Segïn este ejemplo de la tïcnica anterior este umbral es fijado por el calibrado de resortes que aplican patines de fricciïn sobre una superficie de frotamiento, tendiendo los desplazamientos relativos de las dos piezas a provocar el desplazamiento de dichos patines sobre dicha superficie de frotamiento. En esta soluciïn de la tïcnica anterior el umbral es fijado por el calibrado de resortes durante el ensamblaje del amortiguador. Para modificar ulteriormente este umbral, es necesario desmontar dicho amortiguador, proceder a un nuevo calibrado o al reemplazamiento de los resortes, y luego volver a instalar el amortiguador. Ahora bien, existen situaciones donde es deseable adaptar las condiciones de disipaciïn de energïa de tal amortiguador de manera que responda de manera ïptima en funciïn de la naturaleza de las vibraciones a amortiguar. Por ejemplo, el valor ïptimo del umbral serï diferente frente a vibraciones de pequeïa amplitud, por tanto segïn frecuencias mïs elevadas, y segïn vibraciones de baja frecuencia, de amplitud mïs elevada y finalmente segïn condiciones casi estïticas. En otras circunstancias puede ser deseable que la uniïn realizada por tal amortiguador no engendre ninguna fuerza o engendre una fuerza despreciable habida cuenta de la aplicaciïn, es decir que el umbral sea nulo.
El documento US 6 378 671 divulga un dispositivo de amortiguaciïn por fricciïn cuyo esfuerzo normal de contacto, que define el esfuerzo de deslizamiento, puede ser ajustado por la restricciïn de una funda o envolvente sobre un pistïn, siendo provocada dicha restricciïn por la aplicaciïn de un campo magnïtico por medio de una bobina llevada por el pistïn. Asï, la presiïn normal de apriete en la interfaz de frotamiento es sensiblemente proporcional a la intensidad del campo magnïtico. Este dispositivo presenta varios inconvenientes. En primer lugar el principio estructural intrïnseco de este dispositivo de la tïcnica anterior, que utiliza la deformaciïn radial, en restricciïn, de una funda hendida no permite obtener para un campo magnïtico dado una fuerza normal constante sobre todo el recorrido axial del pistïn, siendo la rigidez de las lïminas elïsticas comprendidas entre las hendiduras de la funda variable de una extremidad a la otra de dicha funda. Asï, un campo magnïtico de la misma intensidad se traducirï por la presiïn normal sobre los elementos que frotan mïs importante en una extremidad de la funda, el lado de extremidad libre de las lïminas, que en la otra extremidad. A continuaciïn, la utilizaciïn de un dispositivo magnïtico limita las elecciones posibles de los materiales que pueden ser utilizados. Este dispositivo de la tïcnica anterior no puede asï ser realizado de aleaciïn ligera por ejemplo a base de aluminio o de titanio, y por tanto estï poco adaptado a una utilizaciïn aeronïutica o espacial para las que los criterios de masa son preponderantes. Por otra parte, este dispositivo puede difïcilmente ser utilizado para realizar una uniïn completa bajo un umbral de deslizamiento elevado, pues necesita en este caso potencias de alimentaciïn elïctricas importantes y eventualmente un enfriamiento de las bobinas. Finalmente la utilizaciïn de una tecnologïa basada sobre la generaciïn de un campo magnïtico no estï adaptada a una utilizaciïn de dicho dispositivo en aplicaciones aeronïuticas y espaciales donde tales campos magnïticos son fuentes de dificultades tïcnicas sobre los sistemas de mando y de navegaciïn.
El invento pretende responder a las insuficiencias de la tïcnica anterior, proponiendo un dispositivo de amortiguaciïn por fricciïn cuyas caracterïsticas de disipaciïn de energïa pueden ser ajustadas en funciïn de las caracterïsticas de las vibraciones a amortiguar, mïs particularmente adaptadas a las aplicaciones aeronïuticas y espaciales, cuyos dispositivo comprende
- un primer miembro que se extiende axialmente segïn un eje longitudinal;
- un segundo miembro que se extiende axialmente segïn el mismo eje longitudinal, siendo los dos miembros guiados en traslaciïn uno con relaciïn al otro;
- un elemento de frotamiento se extiende entre los dos miembros y que los une completamente entre sï por fricciïn en traslaciïn axial para cualquier esfuerzo inferior a un umbral 's' tendiendo tal esfuerzo a crear un desplazamiento relativo de los dos miembros en traslaciïn segïn dicho eje longitudinal;
-un dispositivo de ajuste que comprende un accionador piezoelïctrico y que permite regular el valor de dicho umbral;
-medios, distantes del primer y segundo miembro, aptos para pilotar la presiïn de contacto del elemento de frotamiento sobre la superficie de al menos uno de los miembros, en una regiïn que comprende una presiïn de contacto nula.
Asï la regulaciïn del umbral de deslizamiento del elemento de frotamiento permite ajustar las condiciones de uniïn entre los elementos unidos por tal dispositivo, entre una libertad total de traslaciïn de un elemento con relaciïn al otro y una uniïn completa en traslaciïn de los dos elementos asï unidos, la utilizaciïn de accionadores piezoelïctricos permite utilizar cualquier tipo de material para la constituciïn del dispositivo comprendidos materiales compuestos de matriz orgïnica. Este tipo de accionador puede ser fïcilmente pilotado por medios elïctricos, los cuales pueden ser fïcilmente servidos o pilotados a gran distancia por medios de radiocomunicaciïn, ademïs, presenta la ventaja de poder entregar un esfuerzo variable a frecuencias elevadas. Permite asï pilotar la adaptaciïn del umbral de deslizamiento en funciïn de la naturaleza de las vibraciones que deben ser amortiguadas por el dispositivo objeto del invento.
El dispositivo objeto del invento puede ser empleado segïn los modos de realizaciïn particulares, expuestos a continuaciïn, los cuales pueden ser considerados individualmente o segïn cualquier combinaciïn tïcnicamente operativa.
Segïn un modo de realizaciïn ventajoso, los miembros son cilïndricos, siendo el segundo miembro apto para deslizar en el primero y comprendiendo una pluralidad de elementos de frotamiento que se extienden radialmente y repartidos sobre la circunferencia del segundo miembro. Esta configuraciïn permite modular el umbral de deslizamiento en una gama mïs extensa y repartir las disipaciones de energïa, y asï el calentamiento y el desgaste de las superficies en contacto, conservando al mismo tiempo la compacidad del dispositivo.
Segïn un modo de realizaciïn particular, los elementos de frotamiento estïn constituidos por la superficie externa del segundo miembro, siendo modulada la presiïn de contacto por la expansiïn elïstica radial de dicho segundo miembro sobre la totalidad o parte de su longitud de contacto con el primero. Asï, el umbral de deslizamiento es funciïn ïnicamente de la presiïn normal en la interfaz de deslizamiento, la cual es sensiblemente la misma cualquiera que sea la posiciïn axial del segundo miembro en el primero.
Ventajosamente, el dispositivo objeto del invento comprende segïn este modo de realizaciïn una pluralidad de accionadores piezoelïctricos que actïan cada uno segïn una direcciïn radial y repartidos sobre la circunferencia del segundo miembro. Asï es posible obtener una reparticiïn uniforme de la presiïn de contacto sobre la circunferencia incluso en presencia de defectos de circularidad de los miembros o de los defectos de concentricidad de los dos miembros, resultando dichos defectos bien de la fabricaciïn del dispositivo o bien de su deformaciïn en curso de funcionamiento.
El pilotaje del esfuerzo normal, individualizado sobre cada accionador piezoelïctrico, permite igualmente compensar... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo amortiguador (3) caracterizado por que comprende:
- un primer miembro (30) que se extiende axialmente segïn un eje longitudinal;
- un segundo miembro (40) que se extiende axialmente segïn el mismo eje longitudinal, siendo los dos miembros guiados en traslaciïn uno con relaciïn al otro;
- un elemento de frotamiento (21) que se extiende entre los dos miembros y que los une completamente entre sï por fricciïn en traslaciïn axial para cualquier esfuerzo inferior a un umbral 's' tendiendo dicho esfuerzo a crear un desplazamiento relativo de los dos miembros en traslaciïn segïn dicho eje longitudinal;
- un dispositivo de ajuste (50) que comprende un accionador piezoelïctrico y que permite regular el valor de dicho umbral;
- medios (51) , distantes del primer (30) y del segundo miembro (40) , aptos para pilotar la presiïn de contacto del elemento de frotamiento (21, 42) sobre la superficie de al menos uno de los miembros, en una regiïn que comprende una presiïn de contacto nula.
2. Un dispositivo segïn la reivindicaciïn 1, caracterizado por que los miembros (30, 40) son cilïndricos, siendo el segundo miembro (40) apto para deslizar en el primero (30) y comprendiendo una pluralidad de elementos de tratamiento (21, 42) que se extienden radialmente.
3. Un dispositivo segïn la reivindicaciïn 2, caracterizado por que los elementos de frotamiento (42) estïn constituidos por la superficie externa del segundo miembro (40) , siendo modulada la presiïn de contacto por la expansiïn elïstica radial de dicho segundo miembro (40) sobre la totalidad o parte de su longitud de contacto con el primer miembro (30) .
4. Un dispositivo segïn la reivindicaciïn 3, caracterizado por que comprende una pluralidad de accionadores piezoelïctricos (501, 502, 503) que actïan cada uno segïn una direcciïn radial y repartida sobre la circunferencia del segundo miembro (40) .
5. Un procedimiento para el pilotaje de un dispositivo segïn la reivindicaciïn 4, caracterizado por que comprende una etapa que consiste en ajustar el esfuerzo radial de contacto entre el primer (30) y el segundo (40) miembros activando los accionadores piezoelïctricos (501, 502, 503) y en medir el esfuerzo normal de contacto con los accionadores piezoelïctricos (501, 502, 503) utilizados como captadores de fuerza.
6. Un procedimiento segïn la reivindicaciïn 5, caracterizado por que una parte de los accionadores piezoelïctricos es utilizada como captador simultïneamente a la activaciïn de los otros accionadores piezoelïctricos.
7. Un procedimiento segïn la reivindicaciïn 5, caracterizado por que el mismo accionador piezoelïctrico (501, 502, 503) es utilizado sucesivamente como captador y como accionador.
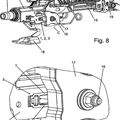
8. Un dispositivo de uniïn de un depïsito de carburante (60) en el cuerpo de un lanzador (70) caracterizado por que comprende un dispositivo amortiguador (3) segïn una cualquiera de las reivindicaciones precedentes.
9. Un procedimiento para el mando de un dispositivo de uniïn de un depïsito segïn la reivindicaciïn 8, caracterizado por que comprende etapas que consisten en:
-regular la presiïn de contacto entre los dos miembros (30, 40) del dispositivo amortiguador (3) de manera que el umbral 's' sea sensiblemente igual a 0;
-regular la presiïn de contacto entre los dos miembros (30, 40) del dispositivo amortiguador de manera que el umbral 's' sea diferente de 0 de forma que amortigïe las vibraciones del depïsito;
-siendo seleccionada una u otra de estas etapas segïn las fases del vuelo del lanzador (70) .
Patentes similares o relacionadas:
Amortiguador de fricción, del 17 de Junio de 2020, de SUSPA GMBH: Amortiguador de fricción, que comprende a. una carcasa (2; 2a) que presenta un eje longitudinal , b. un empujador (4; 4a) que puede ser desplazado […]
 Dispositivo de fricción y amortiguador de fricción con un dispositivo de fricción de este tipo, del 29 de Abril de 2020, de SUSPA GMBH: Dispositivo de fricción para un amortiguador de fricción, en donde el dispositivo de fricción comprende
a. un soporte de forro de fricción […]
Dispositivo de fricción y amortiguador de fricción con un dispositivo de fricción de este tipo, del 29 de Abril de 2020, de SUSPA GMBH: Dispositivo de fricción para un amortiguador de fricción, en donde el dispositivo de fricción comprende
a. un soporte de forro de fricción […]
Amortiguador de fricción, del 7 de Junio de 2019, de SUSPA GMBH: Amortiguador de fricción que comprende a. una carcasa (2; 2a) que presenta un eje longitudinal , b. un empujador (4; 4a) que puede desplazarse a lo largo […]
Unidad de amortiguación del movimiento y unidad de resorte con una unidad de amortiguación del movimiento de este tipo, del 10 de Enero de 2018, de STABILUS GMBH: Unidad de amortiguación del movimiento , que comprende: • un tubo de alojamiento con un eje longitudinal (A), • una […]
Amortiguador de fricción electromecánico, del 5 de Octubre de 2016, de Aksistem Elektromekanik Sanayi ve Ticaret Ltd: Amortiguador de fricción electromécanico que comprende un pistón de amortiguador cilíndrico ; un cuerpo de amortiguador […]
Amortiguador por fricción para cable, del 26 de Febrero de 2014, de VSL INTERNATIONAL AG: Un dispositivo amortiguador para amortiguar el movimiento relativo entre un primer miembro estructural y un segundo miembro estructural en una construcción, […]
 Amortiguador de fricción basado en elastómeros magnéticos, del 13 de Septiembre de 2013, de UNIVERSIDAD DE GRANADA: Amortiguador de fricción basado en elastómeros magnético.
La presente invención hace referencia a un amortiguador que emplea un elastómero magnético como elemento […]
Amortiguador de fricción basado en elastómeros magnéticos, del 13 de Septiembre de 2013, de UNIVERSIDAD DE GRANADA: Amortiguador de fricción basado en elastómeros magnético.
La presente invención hace referencia a un amortiguador que emplea un elastómero magnético como elemento […]
 DISPOSITIVO PARA GUIAR UN CUERPO Y COLUMNA DE DIRECCION PARA UN VEHICULO DE MOTOR, del 14 de Abril de 2010, de THYSSENKRUPP PRESTA AG: Dispositivo para guiar un cuerpo que comprende una primera pared de guía y una segunda pared de guía esencialmente en paralelo a la primera […]
DISPOSITIVO PARA GUIAR UN CUERPO Y COLUMNA DE DIRECCION PARA UN VEHICULO DE MOTOR, del 14 de Abril de 2010, de THYSSENKRUPP PRESTA AG: Dispositivo para guiar un cuerpo que comprende una primera pared de guía y una segunda pared de guía esencialmente en paralelo a la primera […]