Un sistema de seguimiento de objetivos y un procedimiento para el seguimiento de un objetivo.
Un sistema de seguimiento de objetivos (20; 30; 40; 50) que comprende
- un medio de seguimiento (22),
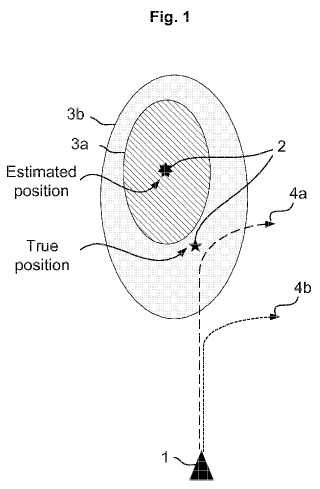
dispuesto para realizar el seguimiento basado en un modelo de un objetivo (2),en base a las mediciones recibidas desde un sensor pasivo (21),
- un medio de detección (23), dispuesto para detectar cuándo un objetivo (2) realiza una maniobra;
- un medio de conmutación de salidas (24), dispuesto para recibir avisos de detección de maniobras desde losmedios de detección (23) y para conmutar entre el primer y segundo modos de salida en respuesta a los avisosde detección recibidos desde dicho medio de detección (23),
caracterizado porque el medio de conmutación de salidas está dispuesto para recibir continuamente estimacionesdel modelo desde el medio de seguimiento (22), en donde en el primer modo de salida, el medio de conmutación desalidas está dispuesto para enviar las estimaciones del modelo recibidas correspondientes con el estado real de unobjetivo que no maniobra, y donde en el al menos un segundo modo de salida, el conmutador está dispuesto parasolo enviar salidas fiables que corresponden con el estado real de un objetivo que maniobra, y en donde en el primermodo de salida, el medio de conmutación está dispuesto para enviar la dirección y la tasa de la dirección y elintervalo y la tasa del intervalo, y en donde en el al menos un segundo modo de salida, la dirección y la tasa de ladirección del objetivo se envían mientras que son bloqueados el intervalo y la tasa de intervalo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08163157.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: ERLANDSSON,TINA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S11/04 G01S 11/00 […] › que utilizan medidas de ángulos.
- G01S11/12 G01S 11/00 […] › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S5/04 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de la fuente se determina mediante una pluralidad de localizadores de dirección espaciados.
PDF original: ES-2407830_T3.pdf
Fragmento de la descripción:
Un sistema de seguimiento de objetivos y un procedimiento para el seguimiento de un objetivo
Campo técnico
La presente invención se refiere, en general, a sistemas de seguimiento, y en particular a un sistema de seguimiento de objetivos como se define en el preámbulo de la reivindicación 1. La presente invención también se refiere a un procedimiento para el seguimiento de un objetivo como se define en el preámbulo de la reivindicación 10, y un producto programa de ordenador como se define en el preámbulo de la reivindicación 14.
Antecedentes Un sistema de seguimiento de objetivos típicamente recibe mediciones de un objetivo desde un sensor, por ejemplo una cámara, una antena u otros dispositivos de medición. El sistema de seguimiento puede usar, a continuación, las mediciones del sensor recibidas para estimar el estado del objetivo. El estado del objetivo puede consistir, por ejemplo, en la posición y la velocidad del objetivo, y también puede incluir aceleración, tasa de giro, el tamaño del objetivo, etc.
Un sistema de seguimiento de objetivos basado en un modelo puede usar un modelo de la dinámica del objetivo para estabilizar el seguimiento del objetivo, Un modelo para un objetivo que viaja con velocidad constante, esto es, a lo largo de una línea recta, es relativamente simple. Sin embargo, tal modelo de objeto que no maniobra no es válido para un objetivo que maniobra.
El seguimiento de un objetivo que maniobra, con un sistema de seguimiento de objetivos dispuesto para seguir a objetivos que no maniobran presenta varios problemas. En primer lugar, hay un riesgo de que el filtro de seguimiento en el sistema de seguimiento de objetivos pueda comenzar a divergir y hacerse inestable numéricamente. En segundo lugar, el filtro de seguimiento en el sistema de seguimiento de objetivos puede comenzar a producir estimaciones erróneas, pero quizás realistas, por ejemplo, de la posición del objetivo y la incertidumbre de los parámetros del filtro de seguimiento. Esto puede dar como resultado que otros sistemas que están usando las salidas del sistema de seguimiento de objetivos puedan recibir información de mal guiado del objetivo. Esto puede ser particularmente crítico si dicho sistema de seguimiento de objetivos se implementa, por ejemplo, en un sistema de evitación de colisiones u otros sistemas de guiado similares.
El documento US 5214433 describe un aparato y un procedimiento para el seguimiento de objetivos que maniobran y objetivos que no maniobran en presencia de una aceleración estocástica. El aparato y el procedimiento utilizan un estimador de Kalman de dos etapas, la primera etapa del cual es un filtro libre de tendencia que proporciona estimaciones de la posición y la velocidad del objetivo, y la segunda etapa del cual es un filtro de tendencias que proporciona estimaciones de la aceleración del objetivo. Estos dos filtros actúan juntos para proporcionar cálculos de procesamiento en paralelo consiguiendo por lo tanto una determinación del estado del objetivo de alta velocidad. Durante las maniobras del objetivo, la salida de la segunda etapa se usa para corregir la salida de la primera etapa. En ausencia de maniobras, la segunda etapa se desactiva y la primera etapa proporciona las estimaciones de posición y velocidad del objetivo.
El documento US 2002113729 A1 describe un procedimiento para calcular el intervalo para un objeto en movimiento por medio de un sensor que determina el ángulo del objeto. El sensor y el objeto se mueven relativamente entre sí, y después de una medición el procedimiento es como sigue: en el supuesto de que el objetivo mantenga una velocidad constante, se calculan varias posibles intervalos del objetivo, así como las áreas de incertidumbre asociadas con estos intervalos, los llamados "modelos de trayectoria recta", en el supuesto de que el objetivo acelere, se calculan varios intervalos posibles del objetivo, así como las áreas de incertidumbre asociadas con estos intervalos, los llamados "modelos de maniobra", varios modelos de trayectoria recta que tienen un modelo de maniobra asignada a los mismos. Al calcular el intervalo del objetivo en los modelos de trayectoria de línea recta que tienen asociados modelos de maniobra, los datos procedentes del modelo de maniobra respectivo se incorporan en una extensión predeterminada si la probabilidad de que el objetivo maniobre excede un límite predeterminado. El intervalo del objetivo desde el sensor se considera que es un promedio ponderado de varios intervalos de modelos de trayectoria recta, estando basada la ponderación en la probabilidad de cada modelo de trayectoria recta.
El documento "Unscented Kalman Filter With Application To Bearing-Only Passive Manoeuvring Target Tracking" de Koteswara Rao S y otros, PROCESAMIENTO DE SEÑALES, COMUNICACIONES Y FUNCIONAMIENTO EN RED 2008. ICNS'08 CONFERENCIA INTERNACIONAL SOBRE, IEEE, P1, 1 de enero de 2008, páginas 219 -224. ISBN: 978-1-4244-1923 -4 describe que la transformación sin olor acoplada con ciertas partes del filtro de Kalman clásico, proporciona un procedimiento más preciso que el Filtro Kalman Extendido para la estimación de estado no lineal. Usando mediciones de solo direcciones, el algoritmo del Filtro Kalman sin olor estima los parámetros del movimiento del objetivo y detecta la maniobra del objetivo, usando los residuos de secuencia aleatoria distribuidos según una Chi cuadrado de media cero, en un formato de ventana deslizante. Durante la maniobra del objetivo, la covarianza del ruido del proceso se aumenta suficientemente de modo que la perturbación en la solución se minimiza. Cuando se completa la maniobra del objetivo, la covarianza del ruido del proceso se disminuye.
El documento "On Target Manouvres in Bearing Only Tracking (Sonar) " de Holst J y otros SEÑALES, SISTEMAS Y ORDENADORES 1991 REGISTRO DE CONFERENCIA DE 1991, DE LA VIGÉSIMA QUINTA CONFERENCIA ASILOMAR EN PACIFIC GROVE, CA, USA 4 -6 NOVIEMBRE 1991. LOS ALAMITOS, CA, USA, IEEE COMPUT.SOC. US, 4 de noviembre de 1991 () , páginas 272 -276, el documento XP010026442 ISBN: 978-0-8186-270-4 describe que la detección de maniobra es una parte esencial del análisis del movimiento del objetivo (TMA) pero representa una desviación de los supuestos básicos sobre los que se construyen los algoritmos de TMA normalizados. Se asume que el objetivo en un instante aleatorio conmuta entre dos movimientos lineales cambiando su curso. El algoritmo de manejo de la maniobra propuesto detecta el cambio, estima el tiempo de cambio, y recalcula las estimaciones del movimiento del objetivo para el tiempo de detección.
Los sistemas de seguimiento de objetivos diseñados para seguir los objetivos que maniobran son conocidos. Sin embargo, a menudo tienen una complejidad de cálculo elevada y son difíciles de implementar.
Sumario Es un objeto de la presente invención diseñar un sistema de seguimiento de objetivos robusto y simple capaz de producir datos de seguimiento fiables, tanto para objetivos que maniobran como para objetivos que no maniobran.
El objeto de la presente invención se consigue por un sistema de seguimiento de objetivos de acuerdo con la reivindicación 1.
Una ventaja de la invención descrita anteriormente es que proporciona solo salidas fiables que describen el estado de un objetivo que no maniobra o que maniobra sin añadir complejidad de cálculo del sistema en el que se implementa. De este modo proporciona un sistema robusto y simple de seguimiento de objetivos.
Una ventaja adicional de la invención descrita anteriormente es que asegura que el sistema de seguimiento no corrompe ningún dato de salida de la medición del sensor incluso si el objetivo maniobra.
Proporcionando las salidas fiables al dispositivo de conmutación de salidas como una selección de las estimaciones del modelo recibidas desde los medios de seguimiento, las salidas recibidas desde un filtro suplementario y/o las salidas recibidas directamente del sensor, la presente invención se proporciona con una flexibilidad simple que le posibilita seleccionar las salidas fiables y de confianza desde una diversidad de fuentes. Una ventaja adicional de esta característica es que el sistema de seguimiento de objetivos se puede modificar fácilmente para las diferentes aplicaciones del entorno del sistema en el que se implementa.
En una realización preferida el medio de seguimiento se dispone para aumentar el ruido del proceso del seguimiento basado en el modelo, en respuesta a la detección de una maniobra del objetivo. Esto proporciona una robustez aumentada frente a los errores del modelo en el filtro de seguimiento, que arrastra beneficiosamente las estimaciones del filtro de seguimiento basado en el modelo hacia las salidas de medición del sensor, esto es, da... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de seguimiento de objetivos (20; 30; 40; 50) que comprende
-un medio de seguimiento (22) , dispuesto para realizar el seguimiento basado en un modelo de un objetivo (2) , en base a las mediciones recibidas desde un sensor pasivo (21) ,
-un medio de detección (23) , dispuesto para detectar cuándo un objetivo (2) realiza una maniobra; -un medio de conmutación de salidas (24) , dispuesto para recibir avisos de detección de maniobras desde los medios de detección (23) y para conmutar entre el primer y segundo modos de salida en respuesta a los avisos de detección recibidos desde dicho medio de detección (23) ,
caracterizado porque el medio de conmutación de salidas está dispuesto para recibir continuamente estimaciones del modelo desde el medio de seguimiento (22) , en donde en el primer modo de salida, el medio de conmutación de salidas está dispuesto para enviar las estimaciones del modelo recibidas correspondientes con el estado real de un objetivo que no maniobra, y donde en el al menos un segundo modo de salida, el conmutador está dispuesto para solo enviar salidas fiables que corresponden con el estado real de un objetivo que maniobra, y en donde en el primer modo de salida, el medio de conmutación está dispuesto para enviar la dirección y la tasa de la dirección y el
intervalo y la tasa del intervalo, y en donde en el al menos un segundo modo de salida, la dirección y la tasa de la dirección del objetivo se envían mientras que son bloqueados el intervalo y la tasa de intervalo.
2. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con la reivindicación 1, en el que dichas salidas fiables son una selección de dichas estimaciones de un modelo recibidas desde dicho medio de seguimiento (22) , las salidas recibidas desde un filtro (41) y/o las salidas recibidas directamente desde el sensor (21) .
3. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con una cualquiera de las reivindicaciones 1 2, en el que dicho medio de seguimiento (22) está dispuesto para aumentar el ruido del proceso del seguimiento basado en el modelo, en respuesta a la información que indica la detección de una maniobra del objetivo que es recibida desde dicho medio de detección (23) .
4. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con una cualquiera de las reivindicaciones 1 25 3, que comprende además:
un medio de conmutación de entradas (31, 51) dispuesto para desconectar una entrada del medio de seguimiento (22) de la salida de medición del sensor (21) , y/o aumentar los parámetros de incertidumbre en las mediciones de salida del sensor.
5. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con una cualquiera de las reivindicaciones 1
4, en el que dicho medio de conmutación de salidas (24) está dispuesto para aumentar los parámetros de incertidumbre en las estimaciones del modelo recibidas desde dicho medio de seguimiento (22) .
6. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con una cualquiera de las reivindicaciones 2 5, en el que dicho filtro (41) es un filtro no basado en un modelo, tal como un filtro paso bajo y/o un filtro diferencial.
7. Un sistema de seguimiento de objetivos (20; 30; 40; 50) de acuerdo con una cualquiera de las reivindicaciones 1 35 6, en el que dicho sensor (21) es una cámara o una antena.
8. Un sistema de evitación de colisiones que comprende un sistema de seguimiento de objetivos, de acuerdo con una cualquier de las reivindicaciones 1 -7.
9. Un procedimiento para el seguimiento de un objetivo (2) realizando el seguimiento basado en un modelo de un
objetivo usando un medio de seguimiento basado en las mediciones recibidas desde un sensor pasivo (21) , que 40 comprende las etapas de:
- detectar que el objetivo (2) realiza una maniobra; -recibir continuamente estimaciones del modelo desde el medio de seguimiento; -enviar en un primer modo de salida las estimaciones recibidas del modelo, que corresponden con el estado real de un objetivo que no maniobra;
-recibir los avisos de detección de maniobras en base a la detección; -conmutar en respuesta a dicha detección, desde el primer modo de salida a un segundo modo de salida caracterizado porque en el primer modo se envían la dirección y la tasa de dirección y el intervalo y la tasa del intervalo, y porque en el segundo modo de salida solo se envían las salidas fiables que corresponden con el estado real de un objetivo que maniobra, en el que se envían la dirección y la tasa de dirección del objetivo mientras que 50 son bloquedos el intervalo y la tasa del intervalo.
10, Un procedimiento de acuerdo con la reivindicación 9, que comprende además la etapa de:
recibir dichas salidas fiables como una selección de dichas estimaciones de un modelo, como salidas de filtro (41) y/o como salidas del sensor (21) .
11. Un procedimiento de acuerdo con las reivindicaciones 9 o 10, que comprende además la etapa de:
aumentar el ruido del proceso del seguimiento basado en el modelo en respuesta a la información que indica una maniobra del objetivo.
12. Un procedimiento de acuerdo con una cualquiera de las reivindicacione.
9. 11, que comprende además la etapa 5 de:
desconectar la entrada de un medio de seguimiento (22) de la salida de medición de dicho sensor (21) ; y/o aumentar los parámetros de incertidumbre en las mediciones de salida del sensor y/o en las estimaciones del modelo.
13. Un producto de programa de ordenador para su uso en un sistema de seguimiento de objetivos (20; 30; 40; 50)
que realiza el seguimiento, basado en un modelo, de un objetivo que usa medios de seguimiento, comprendiendo dicho producto de programa de ordenador un medio de código legible por ordenador, que cuando se ejecuta en el sistema de seguimiento de objetivos (20; 30; 40; 50) causa que dicho sistema de seguimiento de objetivos (20; 30; 40; 50) realice las etapas de:
-detectar que el objetivo (2) realiza una maniobra;
-recibir continuamente estimaciones del modelo desde el medio de seguimiento, -enviar en un primer modo de salida las estimaciones del modelo recibidas que corresponden con el estado real de no maniobra, -recibir avisos de detección de maniobra en base a la detección. -conmutar en respuesta a dicha detección, desde el primer modo de salida al segundo modo de salida.
caracterizado porque en el primer modo se envían la dirección y la tasa de dirección y el intervalo y la tasa del intervalo y porque en el segundo modo de salida solo se envían las salidas fiables que corresponden con el estado real de un objetivo que maniobra, en el que se envían la dirección y la tasa de dirección del objetivo, mientras que son bloqueados el intervalo y la tasa del intervalo.
14. Un producto de programa de ordenador para su uso en un sistema de seguimiento de objetivos (20; 30; 40; 50)
de acuerdo con la reivindicación 13, en el que dicho medio de código es almacenado sobre un medio de almacenamiento legible.
Patentes similares o relacionadas:
 Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Supervisión y/o establecimiento de protocolos de una posición de una herramienta en una caja de ascensor, del 28 de Agosto de 2019, de INVENTIO AG: Sistema para la supervisión y/o creación de protocolo de una posición de una herramienta en una caja de ascensor , comprendiendo el sistema: […]
Procedimiento de localización pasiva de emisores radar, del 14 de Junio de 2017, de THALES: Procedimiento de localización pasiva de emisores radar implementado por al menos dos estaciones de Mediciones de Apoyo Electrónico denominadas MAE , teniendo […]
Dispositivo y procedimiento de recogida de datos para la localización de una fuente de interferencia, del 2 de Noviembre de 2016, de EUTELSAT S.A.: Dispositivo de recogida de datos que permite la localización de una fuente de interferencia dentro una superficie objetivo cuando es conocida la frecuencia de la […]
 Sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada y procedimiento de uso, del 17 de Diciembre de 2014, de PROYECTOS, INGENIERÍA Y GESTIÓN, SOCIEDAD ANÓNIMA (P.R.O.I.N.G.E., S.A.): La invención es un sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada que comprende un bastidor , […]
Sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada y procedimiento de uso, del 17 de Diciembre de 2014, de PROYECTOS, INGENIERÍA Y GESTIÓN, SOCIEDAD ANÓNIMA (P.R.O.I.N.G.E., S.A.): La invención es un sistema de supervisión y ayuda de las operaciones manuales de ensamblado industrial mediante realidad aumentada que comprende un bastidor , […]
SISTEMA TRANSPONDEDOR CON DOBLE ARROLLAMIENTO DE ANTENA., del 1 de Mayo de 2007, de AVID IDENTIFICATION SYSTEMS, INC.: Interrogador para un dispositivo de radiofrecuencia, que comprende: un circuito de accionamiento para la antena ; un receptor para recibir y decodificar […]
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UNA POSICION., del 16 de Diciembre de 2006, de GEOMETRIE CONCERN VERWALTUNGS- UND BETEILIGUNGSGESELLSCHAFT MBH: Procedimiento para determinar una posición en el espacio comprendiendo los pasos del procedimiento: - definición de un espacio de coordenadas local por la disposición […]
PROCEDIMIENTO PARA UN SISTEMA DE NAVEGTACION DISTRIBUIDA EN TIEMPO REAL., del 1 de Noviembre de 2005, de TELEVIGATION, INC.: Un procedimiento para determinar una ubicación de un usuario en un servidor de navegación que comprende: recibir una señal de posición del usuario; […]
DISPOSITIVO Y PROCEDIMIENTO DE LOCALIZACIÓN PASIVA DE OBJETIVOS RADIANTES, del 23 de Febrero de 2012, de THALES: Dispositivo de localización pasiva de objetivos radiantes , que comprende un primer portador equipado con una antena de radar […]