Sujeta-piezas particularmente para partes que tienen una gran masa a ser mecanizada en maquinas-herramienta tales como tornos verticales y similares.
Un sujeta-piezas (10) particularmente para partes que tienen una gran masa a ser mecanizada en máquinas-herramienta tales como tornos verticales y similares,
que comprende
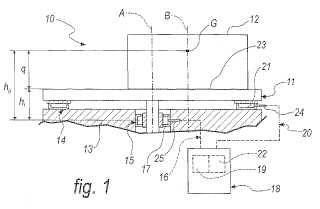
- una mesa de trabajo (11) para soportar una parte (12) a ser mecanizada,
- una base (13) para soportar dicha mesa de trabajo (11),
- al menos un cojinete axial (14) que está adaptado para soportar dicha mesa de trabajo (11) sobre dicha base (13); y
- una unidad de procesamiento central (18) que comprende medios (19) para estimar la excentricidad del eje de centro de gravedad (B) de una parte (12) dispuesta sobre dicha mesa de trabajo (11) respecto de un eje de rotación (A) de dicha mesa de trabajo (11),
el sujeta-piezas (10) estando caracterizado por el hecho de que comprende además
- al menos un cojinete radial (15) provisto de correderas radiales hidrostáticas que está adaptado para el acoplamiento guiado de dicha mesa de trabajo (11) con dicha base (13) para permitir la rotación alrededor de dicho eje de rotación (A) de dicha mesa de trabajo (11) sobre dicha base (13), dicho eje de rotación (A) estando formado por el eje de dicho cojinete radial (15), y
- primeros medios sensores (16), que están conectados funcionalmente a al menos una corredera radial elegida (17) de dicho al menos un cojinete radial (15) y están adaptados para detectar al menos un parámetro funcional, dicho al menos un parámetro funcional siendo un parámetro que indica la operación de dicha al menos una corredera radial elegida (17),
- dicha unidad de procesamiento central (18) estando conectada funcionalmente a dichos primeros medios sensores (16) con el fin de recibir de ellos estimaciones de dicho parámetro funcional, y dichos medios de estimación (19) estando adaptados para procesar los valores de dicho parámetro funcional detectado por dichos medios sensores (16), para obtener el valor de dicha excentricidad (E).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/064850.
Solicitante: HPT SINERGY S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Piazza Salvemini 7 35131 Padova ITALIA.
Inventor/es: GUELI,FRANCESCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/38 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › utilizando soportes fluidos o soportes de colchón fluido.
- B23Q11/00 B23Q […] › Accesorios montados sobre las máquinas herramientas para mantener las herramientas o los órganos de las máquinas en buenas condiciones de trabajo o para enfriar las piezas trabajadas; Dispositivos de seguridad especialmente combinados con las máquinas-herramientas, dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas (en lo que respecta a las máquinas de escariar o de perforar B23B 47/24, B23B 47/32 tienen prioridad; dispositivos de seguridad en general F16P).
- F16F15/32 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16F RESORTES; AMORTIGUADORES; MEDIOS PARA AMORTIGUAR LAS VIBRACIONES. › F16F 15/00 Supresión de las vibraciones en los sistemas (dispositivos de suspensión de los asientos de vehículos B60N 2/50 ); Medios o dispositivos para evitar o reducir las fuerzas de desequilibrio, p. ej. debidas al movimiento (ensayo estático o equilibrado dinámico de máquinas o estructuras G01M 1/00). › Pesos de reglaje o masas de equilibrado o medios equivalentes para equilibrar la piezas rotativas, p. ej. las ruedas de vehículo.
- G01M1/32 FISICA. › G01 METROLOGIA; ENSAYOS. › G01M ENSAYO DEL EQUILIBRADO ESTATICO O DINAMICO DE MAQUINAS O ESTRUCTURAS; ENSAYO DE ESTRUCTURAS O APARATOS, NO PREVISTOS EN OTRO LUGAR. › G01M 1/00 Ensayo del equilibrado estático o dinámico de máquinas o estructuras. › por adición de material al objeto a ensayar, p. ej. por pesos correctores.
PDF original: ES-2444568_T3.pdf
Fragmento de la descripción:
Sujeta-piezas particularmente para partes que tienen una gran masa a ser mecanizada en máquinas-herramienta tales como tornos verticales y similares.
Campo técnico
La presente invención hace referencia a un sujeta-piezas, particularmente para partes que tienen una gran masa a ser mecanizada en máquinas-herramienta tales como tornos verticales y similares. Estado de la técnica Actualmente, en el campo de las máquinas-herramienta para mecanizar partes que tienen una gran masa, por ejemplo incluso más de 100 toneladas, tornos verticales provistos de un sujeta-piezas son conocidos que comprenden mesas rotatorias provistas de quintas ruedas de soporte con cojinetes de bolas, es decir, cojinetes de rodillos o cojinetes de pista de rodamiento o cojinetes hidrostáticos.
Con el fin de poder realizar con eficacia operaciones de mecanizado con tales máquinas es necesario que la parte esté equilibrada sobre la mesa de trabajo, es decir, es necesario que el eje del centro de gravedad de las cargas soportadas por la mesa de trabajo coincida con el eje de rotación de la mesa de trabajo.
De hecho, una excentricidad en el centro de gravedad de las cargas dispuestas sobre la mesa de trabajo, respecto del eje de rotación de la mesa de trabajo, produce tensiones centrífugas de intensidad que es proporcional a la masa de tales cargas y a la velocidad de rotación de la mesa de trabajo.
Si hay una excentricidad de la carga sobre la mesa de trabajo, por lo tanto, la elevada masa de las partes soportadas en rotación por la mesa de trabajo induce tensiones sobre los cojinetes de guía radial de la mesa de trabajo que son tales como para dañarlos gravemente dentro de un corto periodo de operación de la máquina.
Por lo tanto, en el sector en el que tales máquinas-herramienta son utilizadas, hay una necesidad urgente para equilibrar la parte sobre la mesa de trabajo antes de arrancar la máquina-herramienta para mecanizar la parte.
Sin embargo, actualmente, máquinas equilibradoras no son conocidas que hagan posible equilibrar partes que tengan una masa de unas pocas docenas de toneladas, así como de más de cien toneladas.
Por lo tanto, en la actualidad los técnicos cuyo trabajo es preparar la máquina para el mecanizado realizan un equilibrado de la parte, basando sus conclusiones en la intuición y la experiencia.
En la práctica, los técnicos disponen contrapesos en la mesa de trabajo, o asociados con la pieza que está soportando, como una función del comportamiento dinámico del sujeta-piezas, que es detectable cuando la mesa de trabajo es hecha rotar.
Sin embargo, este método es muy empírico en su naturaleza, y el equilibrado que se obtiene con él es susceptible de errores de estimación que dependen de la experiencia y la intuición del técnico que realiza la operación de equilibrado.
EP 2 607 569 A1 muestra una mesa rotatoria hidrostática para una máquinaherramienta que comprende una quinta rueda de soporte inferior fijada provista de una pluralidad de bolsillos hidrostáticos dispuestos de modo circunferencial alimentados con fluido presurizado para soportar de una manera de suspensión fluida, mediante una película de soporte, una quinta rueda superior rotatoria provista de un plano de trabajo sobre el cual posicionar un elemento de carga a ser mecanizado. Un sistema de alimentación de fluido presurizado, que comprende una pluralidad de unidades de alimentación conectadas a los bolsillos hidrostáticos, provee cada bolsillo hidrostático de fluido presurizado a una presión de alimentación respectiva que es ajustable para mantener un grosor sustancialmente constante de película de soporte formada por los bolsillos hidrostáticos dispuestos de forma circunferencial interpuestos entre las quintas ruedas inferiores y superiores para eliminar o reducir significativamente el fenómeno de inclinación de la mesa rotatoria en el caso de cargas descentradas o excéntricas. Los valores de cada presión de alimentación ajustable son modulados según una ley sustancialmente sinusoidal que es una función de la posición angular de una carga descentrada respecto de un eje de referencia de la mesa. La posición angular del elemento descentrado es establecida como una función de una posición de desequilibrio inicial del elemento que está determinada por al menos tres sensores de presión espaciados angularmente conectados a respectivos bolsillos hidrostáticos espaciados angularmente, y de un subsiguiente ángulo de rotación de la mesa respecto al eje de referencia que es medido por otros medios sensores.
GB 2 160 451 A muestra una unidad de mesa rotatoria utilizada en el campo del mecanizado de ultraprecisión de piezas de trabajo tales como componentes microminiaturizados. La unidad de mesa rotatoria comprende un elemento base estacionario, y un elemento de mesa rotatorio con un eje central fijado allí que es montado rotatoriamente sobre el elemento base mediante cojinetes interpuestos entre el cojinete y una perforación cilíndrica del elemento base estacionario. Almohadillas de presión estáticas espaciadas de forma circunferencial de una porción guía periférica del elemento base son alimentadas con fluido presurizado que llena un espacio libre entre la porción guía y una pared inferior de una ranura anular del elemento de mesa rotatorio, funcionando así como una guía de cojinete hidrostático para soportar axialmente el elemento de mesa rotatorio sobre el elemento base. Una guía de cojinete hidrostático similar también está provista en la porción central del elemento de mesa para soportar radialmente el elemento de mesa mediante almohadillas de presión estáticas espaciadas circunferencialmente formadas sobre una guía cilíndrica del elemento base y alimentadas con fluido presurizado que llena un espacio libre anular entre la guía cilíndrica y un hueco vertical del elemento de mesa. Un motor directo principal mueve un borde periférico del elemento de mesa rotatorio y un motor directo auxiliar provee fuerza motriz suplementaria al motor directo principal como una función de una señal de detección de un circuito de detección de corriente que detecta un cambio en la corriente eléctrica del motor directo principal, de este modo detectando un cambio en cualquier carga aplicada al elemento de mesa. El motor directo principal puede ser un motor hidráulico, en cuyo caso el circuito de detección de corriente es reemplazado por un circuito de detección de presión hidráulico.
US 3 776 065 A muestra un aparato equilibrador automático para equilibrar automáticamente un cuerpo rotatorio que está montado sobre una máquina-herramienta (máquina de amolar) cuando el cuerpo rotatorio (muela) es rotado en una condición desequilibrada. Un huso montado sobre una camisa de cojinete está provisto de un detector de vibración para detectar la vibración del huso debido a una condición desequilibrada de la muela, el detector de vibración estando compuesto de bolsillos de cojinetes fluidos circunferenciales dispuestos entre el huso y la camisa y mutuamente conectados a través de pasadizos restringidos circunferenciales de 90º, y válvulas amplificadoras incluyendo válvulas de mariposa y válvulas de carrete en comunicación fluida presurizada con los bolsillos de cojinete fluidos. Un eje operativo primario, movible axialmente recibido en una perforación de huso, está conectado en un extremo a un dispositivo motriz y en otro extremo a un segundo eje operativo que tiene piezas equilibradoras con forma de disco anulares primeras y segundas conectadas mediante ranuras deslizantes suyas con respectivos rodillos motrices. El dispositivo motriz comprende un cilindro rotatorio y un cilindro alternativo provisto de respectivas cámaras de presión operadas por pistones, en comunicación fluida con las válvulas de carrete de las válvulas amplificadoras a través de válvulas de solenoide, para rotar el eje operativo primario y para mover axialmente el eje operativo primario y el eje secundario conectado allí mediante fluctuación de presión detectada por el detector de vibración, causando el movimiento radial de las piezas equilibradoras y la compensación automática de la condición desequilibrada de la muela o la localización excéntrica del centro de gravedad del huso. Explicación de la invención El objetivo de la presente invención es concebir un sujeta-piezas que haga posible equilibrar de modo preciso y efectivo la carga que es soportada por la mesa de trabajo para mecanizar la parte dispuesta sobre ella.
Dentro de este objetivo, un objeto de la invención es proveer un sujeta-piezas que haga posible indicar al operario la posición del eje de centro de gravedad de la carga soportada por la mesa de trabajo respecto del eje de rotación de la mesa de trabajo.
... [Seguir leyendo]
Reivindicaciones:
1. Un sujeta-piezas (10) particularmente para partes que tienen una gran masa a ser mecanizada en máquinas-herramienta tales como tornos verticales y similares, que comprende
- una mesa de trabajo (11) para soportar una parte (12) a ser mecanizada,
- una base (13) para soportar dicha mesa de trabajo (11) ,
- al menos un cojinete axial (14) que está adaptado para soportar dicha mesa de trabajo (11) sobre dicha base (13) ; y
- una unidad de procesamiento central (18) que comprende medios (19) para estimar la excentricidad del eje de centro de gravedad (B) de una parte (12) dispuesta sobre dicha mesa de trabajo (11) respecto de un eje de rotación (A) de dicha mesa de trabajo (11) ,
el sujeta-piezas (10) estando caracterizado por el hecho de que comprende además -al menos un cojinete radial (15) provisto de correderas radiales hidrostáticas que está adaptado para el acoplamiento guiado de dicha mesa de trabajo (11) con dicha base (13) para permitir la rotación alrededor de dicho eje de rotación (A) de dicha mesa de trabajo (11) sobre dicha base (13) , dicho eje de rotación (A) estando formado por el eje de dicho cojinete radial (15) , y -primeros medios sensores (16) , que están conectados funcionalmente a al menos una corredera radial elegida (17) de dicho al menos un cojinete radial (15) y están adaptados para detectar al menos un parámetro funcional, dicho al menos un parámetro funcional siendo un parámetro que indica la operación de dicha al menos una corredera radial elegida (17) ,
-dicha unidad de procesamiento central (18) estando conectada funcionalmente a dichos primeros medios sensores (16) con el fin de recibir de ellos estimaciones de dicho parámetro funcional, y dichos medios de estimación (19) estando adaptados para procesar los valores de dicho parámetro funcional detectado por dichos medios sensores (16) , para obtener el valor de dicha excentricidad (E) .
2. El sujeta-piezas según la reivindicación 1, caracterizado por el hecho de que dicho cojinete axial (14) comprende correderas axiales con soporte hidrostático, dicho sujeta-piezas (10) comprendiendo además segundos medios sensores (20) , que están conectados funcionalmente a al menos una corredera axial elegida (21) de dicho cojinete
axial (14) y están adaptados para detectar al menos un parámetro operativo, dicho al menos un parámetro operativo siendo un parámetro que indica la operación de dicha al menos una corredera axial elegida (21) , dicha unidad de procesamiento central (18) estando conectada además funcionalmente a segundos medios sensores (20) con el fin de recibir de ellos estimaciones de dicho parámetro operativo, dicha unidad de procesamiento central (18) comprendiendo además medios (22) para evaluar la altura (q) , sobre dicha mesa de trabajo (11) , del centro de gravedad (G) de una parte (12) dispuesta sobre la superficie de descanso (23) de dicha mesa de trabajo (11) , dicho medios de estimación (22) estando adaptados para procesar dichos valores de dichos parámetros detectados por dichos primeros y segundos medios sensores (16, 20) para obtener el valor de dicha altura (q) .
3. El sujeta-piezas según la reivindicación 2, caracterizado por el hecho de que dichos segundos medios sensores (20) comprenden al menos un primer transductor de presión (24) , que está conectado a dicha al menos una corredera axial elegida (21) , con el fin de detectar una presión de flujo axial (P1) , que es la presión operativa de dicha al menos una corredera axial elegida (21) , dicho al menos un parámetro operativo comprendiendo dicha presión de flujo axial (P1) .
4. El sujeta-piezas según la reivindicación 3, caracterizado por el hecho de que dichos primeros medios sensores (16) comprenden al menos un segundo transductor de presión (25) , que está conectado a dicha al menos una corredera radial elegida (17) con el fin de detectar una presión de flujo radial (P2) , que es la presión operativa de dicha al menos una corredera radial elegida (17) , dicho al menos un parámetro funcional comprendiendo dicha presión de flujo radial (P2) .
5. El sujeta-piezas según la reivindicación 4, caracterizado por el hecho de que dicha unidad de procesamiento central (18) comprende medios de cálculo de carga, que están adaptados para calcular el valor de la carga (m) que soporta dicha mesa de trabajo (11) , dicho valor de carga (m) siendo igual al producto obtenido por multiplicar un valor de una variación de presión axial estacionaria (dP0) multiplicado por una primera área virtual (Av1) multiplicado por el número de correderas de dicho cojinete axial (14) , en
.
fórmulas m=dP0. Av1 n1, dicha variación de presión axial estacionaria (dP0) siendo igual a la variación de presión detectada por dicho primer transductor de presión (24) entre una condición en la que dicha mesa de trabajo (11) está estacionaria y no cargada y una condición en la que dicha mesa de trabajo (11) está estacionaria y cargada con dicha carga, y dicha primera área virtual (Av1) siendo el área virtual de dicha corredera axial elegida (21) .
6. El sujeta-piezas según la reivindicación 5, caracterizado por el hecho de que dichos medios de estimación (19) comprenden.
- medios de grabación, que están adaptados para realizar una operación para grabar (C) valores de un ángulo de rotación (a) , de dicho valor de la carga (m) y de valores de dicha presión de flujo radial (P2) como una función de dicho ángulo de rotación (a) , dicho ángulo de rotación (a) siendo el ángulo de rotación de dicha mesa de trabajo (11) alrededor de dicho eje de rotación (A) respecto de una referencia predefinida (D) ,
- primeros medios de cálculo, que están adaptados para paralizar una primera operación (H) para calcular una variación de presión de flujo radial máxima (dP2max) y un ángulo de presión máximo (xmax) , dicho valor de variación de presión de flujo radial máxima (dP2max) siendo igual al valor máximo asumido por la variación de dicha presión de flujo radial (P2) detectada por dicho segundo transductor de presión (25) en un intervalo de valores de dicho ángulo de rotación (x) que cubre 360º y corresponde a una rotación de dicha mesa de trabajo (11) realizada a una velocidad angular constante elegida (v) , y dicho ángulo de presión máximo (xmax) siendo el valor asumido por dicho ángulo de rotación (x) para el cual dicha variación de presión de flujo radial (dp2) es igual a dicha variación de presión de flujo radial máxima (dp2max) ,
- segundos medios de cálculo, que están adaptadas para realizar una segunda operación (L) para calcular un valor de un ángulo de la carga (y) y un valor de la fuerza de la carga (F) , dicho ángulo de carga (y) siendo igual a la diferencia obtenida restando de 360º el valor de dicho ángulo de presión máxima (xmax) expresado en grados, en fórmula yº=360º - xmaxº, dicho valor de fuerza de carga (F) siendo además igual al producto de la multiplicación de la mitad del número de correderas (n2) de dicho cojinete radial (15) multiplicado por una segunda área virtual (Av2) multiplicado por dicha variación de
.
presión de flujo radial máxima (dP2max) , en fórmula F= (n2/2) .Av2 dP2max, dicha segunda área virtual (Av2) siendo el área virtual de dicha corredera radial elegida (17) ,
- terceros medios de cálculo, que están adaptados para realizar una tercera operación para calcular dicho valor de excentricidad E) igual al ratio que es el resultado de la división de dicha fuerza de la carga (F) dividido por el producto de dicho valor de la carga (m) multiplicado por el cuadrado del valor de dicha velocidad angular elegida (v) , en fórmula E=F/ (m.v2) .
7. El sujeta-piezas según la reivindicación 6, caracterizado por el hecho de que dichos medios de grabación están además adaptados para realizar una operación de grabación auxiliar (Q) de valores de dicha presión de flujo axial (P1) como una función de dicho ángulo de rotación (x) , dichos medios de estimación (22) comprendiendo
- cuartos medios de cálculo, que están adaptados para realizar una cuarta operación (R) para calcular un valor de variación de presión de flujo axial máxima (dP1max) igual al valor máximo asumido por la variación de dicha presión de flujo axial (P1) detectada por dicho primer transductor de presión (24) en una gama de valores de dicho ángulo de rotación (x) que cubre 360º y corresponde a una rotación de dicha mesa de trabajo (11) realizada a dicha velocidad angular constante elegida (v) ,
- quintos medios de cálculo, que están adaptados para realizar una quinta operación (T) para calcular un valor de momento de inclinación (MF) igual al producto que es el resultado de la multiplicación de dicha primera área virtual (Av1) multiplicado por dicha variación de presión de flujo axial máxima (dPmax) dividido por un coeficiente
.
de distribución (s) , en fórmula MF= Av1 dP1max/s, dicho coeficiente de distribución (s) siendo igual al recíproco del producto obtenido por la multiplicación del radio de las correderas (r) multiplicado por la suma obtenida añadiendo los cuadrados de los cosenos de los ángulos de los centros de las correderas (a1) estimado respecto de un radio de referencia, en fórmula
-sextos medios de cálculo, que están adaptados para realizar una sexta operación (U) para calcular dicha altura (q) igual a la diferencia entre una altura del centro de gravedad (hg) y una altura de la mesa de trabajo (h1) , en fórmula q=hg-h1, dicha altura del centro de gravedad (hg) siendo igual al ratio obtenido de la división de dicho valor del momento de inclinación (MF) dividido por dicha fuerza de la carga (F) , en fórmula hg= MF/F, y dicha altura de la mesa de trabajo (h1) siendo igual a la distancia entre el centro de dicho cojinete radial (15) y dicha superficie de descanso (23) de dicha mesa de trabajo (11) .
8. El sujeta-piezas según la reivindicación 7, caracterizado por el hecho de que dichos medios de grabación y dichos medios de cálculo están integrados en un ordenador electrónico.
9. El sujeta-piezas según la reivindicación 8, caracterizado por el hecho de que dicha unidad de procesamiento central (18) comprende medios para interactuar con el operario que están adaptados para tener al menos
- el valor de dicho ángulo de presión máximo (xmax) respecto de dicha referencia (D) ,
- el valor de dicha excentricidad (E) , y
- el valor de dicha altura (q) .
10. El sujeta-piezas según la reivindicación 9, caracterizado por el hecho de que dicha unidad de procesamiento central (18) comprende séptimos medios para calcular una masa de contrapeso y una posición de dicha masa de contrapeso sobre dicha mesa de trabajo (11) , para el equilibrado de la parte (12) sobre dicha mesa de trabajo (11) , dicho equilibrado correspondiendo a una configuración en la que dicha excentricidad (E) tiene un valor cero.
11. El sujeta-piezas según una de las reivindicaciones anteriores, caracterizado por el hecho de que al menos uno selectivamente entre dicho al menos un cojinete axial y dicho al menos un cojinete radial comprende
- un cojinete con elementos rodantes, y
- correderas hidrostáticas, que están interpuestas entre dicho cojinete con elementos rodantes y al menos un componente de dicho sujeta-piezas elegido entre dicha mesa de trabajo y dicha base.
Patentes similares o relacionadas:
Máquina herramienta dental, del 15 de Julio de 2020, de IVOCLAR VIVADENT AG: Máquina herramienta dental, en particular fresadora dental , con una herramienta intercambiable, en particular a través de un banco de herramientas , […]
CABEZAL PORTAHERRAMIENTAS CON INDUCTOR DE REFRIGERANTE A MUY ALTA PRESIÓN INCORPORADO, del 14 de Julio de 2020, de MADAULA MATENCIO, Josep Eduard: 1. Cabezal portaherramientas con inductor de refrigerante a muy alta presión incorporado que, consistente en un cabezal portaherramientas rotativo, aplicable para montar […]
Máquina y método de procesamiento de superficies herméticas, del 22 de Abril de 2020, de Mitsubishi Hitachi Power Systems, Ltd: Una máquina de procesamiento de superficies herméticas (1; 1A; 1B; 1C) para realizar el corte de una superficie de unión de un miembro hermético en un cuerpo […]
Máquina lavadora para perfiles largos con cubierta de lámina y procedimiento para lavar perfiles largos, del 8 de Abril de 2020, de Rattunde AG: Dispositivo de lavado para perfiles largos con un tambor que puede girar alrededor de un eje de rotación horizontal con una pluralidad de alojamientos […]
Dispositivo de detención de vibración, del 11 de Marzo de 2020, de MATSUURA MACHINERY CORPORATION: Un sistema que incluye: una pieza columnar que está dividida, a lo largo de una dirección circunferencial, en una zona de procesamiento formada en un estado […]
Máquina herramienta, del 15 de Enero de 2020, de HOMAG GmbH: Máquina herramienta para el mecanizado de preferiblemente piezas de trabajo en forma de placa, que están compuestas preferiblemente, al menos por secciones, […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina de fresado de pórtico, del 21 de Noviembre de 2019, de INNSE-BERARDI S.P.A. SOCIETA' UNIPERSONALE: 1. Máquina de fresado de pórtico , provista de: - un par de montantes separados entre sí en una dirección transversal (Y), en la que cada montante se […]