SISTEMA Y PROCEDIMIENTO DE MEDICIÓN DEL ESPESOR DE FROTADORES DE PANTÓGRAFO.
Sistema y procedimiento de medición del espesor de frotadores de pantógrafo.
El sistema comprende:
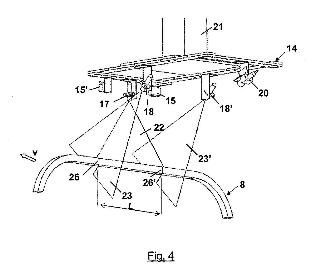
medios de iluminación láser principal (17) que proyectan una línea láser horizontal (25) sobre la cara superior del frotador (8) según un plano (22) paralelo al frotador;
medios de iluminación láser auxiliares (18, 18') que iluminan oblicuamente al frotador (8) según dos planos transversales (23, 23') al mismo, proyectando dos líneas láser auxiliares (26, 26') sobre el frotador (8);
medios de captación de imágenes (20) que capturan imágenes del frotador (8) incluyendo las líneas láser auxiliares (26, 26') y la línea láser horizontal (25);
medios de procesamiento de datos (19) que analizan las imágenes para:
- detectar las líneas láser auxiliares (26, 26');
- detectar la línea láser horizontal (25);
- calcular una línea base (30') empleada como origen para las medidas del espesor;
- obtener el espesor del frotador a partir de la diferencia en coordenadas verticales entre la línea láser horizontal (25) y la línea base (30').
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100703.
Solicitante: UNIVERSIDADE DE VIGO.
Nacionalidad solicitante: España.
Inventor/es: VAZQUEZ NUÑEZ,FERNANDO, SAMANIEGO LÓPEZ,Ricardo, ÁLVAREZ GIMÉNEZ,Ícaro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60L3/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 3/00 Dispositivos eléctricos de seguridad sobre vehículos propulsados eléctricamente; Control de los parámetros de funcionamiento, p. ej. velocidad, deceleración o consumo de energía (métodos o disposición de circuitos para el control o monitoreo de baterías o pilas de combustible B60L 58/00). › Registro de los parámetros de funcionamiento.
- G01B11/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
- G01B11/16 G01B 11/00 […] › para la medida de la deformación de un sólido, p. ej. galga extensiométrica óptica.
- G06T7/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Fragmento de la descripción:
Sistema y procedimiento de medición del espesor de frotadores de pant69Jafo
Campo de la invención
La presente invención se engloba en el campo de las inspecciones de
5 frotadores de pantógrafos ferroviarios, donde dicha inspección se realiza en tiempo
real y automáticamente, mediante visión artificial, sin necesidad de detener el tren ni
subir personal al techo del mismo.
Antecedentes de la invención
1 O El pantógrafo consiste en un sistema articulado que sujeta un patín o frotador,
presionándolo contra la catenaria, bajo la que se desliza. Se sitúa en el techo de la
unidad tractora y es regulable en altura de forma automática, para poder alcanzar la
catenaria independientemente de la altura a la que se encuentre el hilo conductor
aéreo. Para evitar que el frotador se desgaste en un sólo punto, la trayectoria de la
15 catenaria se dispone en zigzag, de modo que va barriendo la mayor parte del frotador
provocando un desgaste más o menos uniforme en toda su superficie.
En la actualidad, la inspección de frotadores de pantógrafos ferroviarios se
realiza mediante inspección visual, para lo que es necesario elevar al personal de
taller hasta el techo del tren, asegurándose previamente de cortar la energía de la
20 catenaria electrificada. Para ello, debido a lo delicado de la operación, son necesarios
múltiples sistemas de seguridad. Esta inspección visual, además de los riesgos
inherentes al proceso, lleva un tiempo elevado, es propenso a fallos y no facilita el
disponer de información detallada del perfil para realizar un mantenimiento predictivo
fiable.
25 Además de la inspección manual, comúnmente utilizada, existen sistemas
automáticos en el mercado que realizan la inspección de frotadores de pantógrafos
ferroviarios.
Pancam es un sistema de inspección de pantógrafos basado en visión artificial,
desarrollado y comercializado por la empresa australiana HameyVision. Este sistema
30 utiliza dos cámaras y un entorno de iluminación controlada para obtener diversas
imágenes de los frotadores, que son posteriormente analizadas mediante algoritmos
de reconocimiento de patrones en busca de fracturas, zonas de excesivo desgaste y
otras patologías en el perfil de los mismos. El resultado del análisis se presenta al
operario en un ordenador mediante un interfaz web accesible por red local.
La empresa australiana MRX Technologies desarrolla y comercializa un
sistema similar llamado PCMS (Pantograph Carbon Monitoring System) basado en el
mismo principio que el anterior. La principal diferencia radica en que este último,
mediante un complejo sistema de múltiples cámaras, iluminadores y reflectores, es
capaz de proveer mayor precisión y resolución, así como ciertos datos adicionales,
5 como son los ángulos de inclinación de los frotadores.
El sistema APIS (Automated Pantograph lnspection System) , de la empresa
norteamericana Duostech, utiliza un principio similar. La principal diferencia radica en
la utilización de iluminación infrarroja y en el hecho de que el algoritmo utilizado, en
lugar de aplicar técnicas de reconocimiento de patrones, compara las imágenes
1 O tomadas con otras de referencia almacenadas en una base de datos local. De esta
manera, los defectos se detectan mediante comparaciones con imágenes de
pantógrafos en buen estado. La utilización de cámaras infrarrojas hace los sistemas de
visión artificial más robustos a cambios de iluminación local, aunque siguen siendo
muy vulnerables a la luz solar directa.
15 Los sistemas comentados requieren de complejas instalaciones en entornos de
iluminación controlados. Estas instalaciones constan de varias cámaras e iluminadores
situados todos ellos en diferentes puntos de la instalación ferroviaria (tanto en los
laterales del tren como en su parte superior, en el caso de Pancam) .
En los dos primeros casos, además, se requieren aparatosas pantallas que
20 sirvan de fondo neutro para las imágenes tomadas por las cámaras, que ocupan un
considerable espacio en la instalación, afectando no ya a la vía en la que se realizará
la medición, sino también a cualquier vía adyacente.
El sistema APIS se basa en un principio totalmente diferente, al no proveer
medidas cuantitativas de las magnitudes a medir. Así, se limita a "marcar" pantógrafos
25 en posible mal estado, para que un operador pueda examinar en detalle las imágenes
tomadas de estos y, si procede, el equipo físico.
El desarrollo de estas tecnologías viene motivado por la necesidad de los
operadores ferroviarios de realizar el mantenimiento de los vehículos de la manera
más óptima posible.
30 Los pantógrafos deben revisarse periódicamente para garantizar la seguridad
de operación de los vehículos. En muchos casos, estas operaciones de mantenimiento
se realizan varias veces por semana para todas y cada una de las máquinas en
circulación.
Actualmente la mayoría de estas comprobaciones se realizan mediante
35
inspección manual. El objetivo de la presente invención es un sistema que se encargade inspeccionar los pantógrafos mientras el tren se encuentra en servicio; es decir, sin
necesidad de desviar el tren a una vía especial o inmovilizarlo en un taller de
mantenimiento. Para realizar esta inspección sin detener el tren la principal tecnología
empleada es la visión artificial.
5 Para representar una ventaja competitiva, los sistemas de inspección deben
presentar una fiabilidad elevada y no requerir a su vez de mantenimientos complejos y
costosos. Además, la precisión alcanzada debe cumplir con los requisitos
especificados en la norma técnica de mantenimiento de los trenes a inspeccionar,
realizándose la inspección a la velocidad de paso del tren. Por último, estos sistemas
1O deben poder integrarse fácilmente en vía, adecuándose a las infraestructuras
existentes en lo que a fijación, alimentación y comunicaciones se refiere; o bien deben
resolver estos aspectos de forma autónoma sin requerir infraestructuras adicionales.
El desarrollo de técnicas que permitan la obtención fiable y precisa de un gran
volumen de datos acerca de los componentes de la rodadura a inspeccionar puede
15 permitir la realización de mantenimiento predictivo a estos equipos, suponiendo así un
salto cualitativo importante para estas operaciones.
Referencias bibliográficas:
[1] S. Kumar, P.K. Tiwari, S.B. Chaudhur y , "An optical triangulation method for non-
20 contact profile measurement", IEEE lnternational Conference on Industrial Technology
(2006)
[2] D. C. Brown, "Ciose-range camera calibration", Photogrammetric Engineering 37
(1971) : 855-866.
[31 J. G. Fr y er and D. C. Brown, "Lens distortion for close-range photogrammetr y ",
25 Photogrammetric Engineering and Remete Sensing 52 (1986) : 51-58.
[4] W. Sun, J. R. Cooperstock, "An empirical evaluation offactors influencing camera
calibration accuracy using three publicly available techniques" (2006)
[5] Z. Zhang, "A flexible new technique for camera calibration", IEEE Transactions on
Pattern Analysis and Machine lntelligence 22 (2000) : 1330-1334.
30 [6] P. F. Sturm añd 5. J. Maybank, "On plane-based camera calibration: A general
algorithm, singularities, applications", IEEE Conference on Computer Vision and
Pattern Recognition, 1999.
[7] R. Brunelli, "Template Matching Techniques in Computer Vision: Theor y and
Practice", Wiley, ISBN 978-0-470-51706-2, 2009
35
[8] A. Jain, "Fundamentals of Digital lmage Processing", Englewood Cliffs, NJ:Prentice-Hall, 1986
5 1 O 15 Descripción de la invención La presente invención permite la inspección en vía de componentes de elevado valor añadido para el sector ferroviario, sin necesidad de desviar los trenes a vías especiales o talleres de mantenimiento. Se utilizan técnicas de visión artificial para inspeccionar frotadores de pantógrafos. La presente invención se trata de un equipo que realiza una medición de espesor de la capa de grafito mediante triangulación con luz estructurada a medida que el tren pasa bajo los sensores (i.e. entrando a taller o a una estación) . Posteriormente se compone un modelo en 3D con la información obtenida y se analiza en busca de desgastes excesivos, grietas o impactos. El proceso de exploración tarda unos pocos segundos, estando los resultados en las bases de datos de la empresa de mantenimiento y/o disponibles para los operarios del taller antes incluso de que el tren llegue a detenerse. Los resultados se facilitan en forma de un informe completo, que incluye: ...
Reivindicaciones:
1. Sistema de medición del espesor de frotadores de pantógrafo, donde el
sistema está configurado para realizar la medición del espesor del frotador estando el
5 tren en marcha, caracterizado por que el sistema comprende:
medios de iluminación láser principal (17) configurados para, ante el paso del
frotador (8}, iluminar la cara superior del frotador (8) según un plano (22) paralelo al
mismo para proyectar una línea láser horizontal (25) sobre dicha cara superior;
medios de iluminación láser auxiliares (18, 18') configurados para, ante el paso
1 O del frotador (8}, iluminar oblicuamente al frotador (8) según dos planos transversales
(23, 23') al mismo, para proyectar dos líneas láser auxiliares (26, 26') sobre el frotador
(8) ;
medios de captación de imágenes (20) configurados para, ante el paso del
frotador (8) , capturar al menos una imagen del frotador (8) que incluya las líneas láser
15 auxiliares (26, 26') y al menos la porción de línea láser horizontal (25) comprendida
entre dichas líneas láser auxiliares (26, 26') ;
medios de procesamiento de datos (19) encargados de analizar la al menos
una imagen tomada por los medios de captación de imágenes (20) para, en cada
imagen:
20 -detectar las líneas láser auxiliares (26, 26') ;
- detectar, tomando como referencia la posición de dichas líneas láser
auxiliares (26, 26') , la línea láser horizontal (25) ;
- calcular una línea base (30') empleada como origen para las medidas
del espesor del frotador;
25 -obtener el espesor del frotador a partir de la diferencia en coordenadas
verticales entre la línea láser horizontal (25) y la línea base (30') .
2. Sistema según la reivindicación 1, que comprende medios de detección de
presencia (15, 15') para detectar el paso del frotador (8) .
30
3. Sistema según la reivindicación 2, que comprende:
un armazón metálico (14) para soportar los medios de detección de presencia
(15, 15') , los medios de iluminación (17, 18, 18') y los medios de captación de imágenes
(20) ;
35 una columna metálica (21) que posiciona al armazón metálico (14) a una altura
adecuada sobre la catenaria (9) ;
una jaula metálica para proporcionar aislamiento electromagnético a los
elementos soportados por el armazón metálico (14) .
5 4. Sistema según cualquiera de las reivindicaciones anteriores, donde los
medios de captación de imágenes (20) comprenden una cámara con filtro óptico
sintonizado con la longitud de onda de los iluminadores láser.
5. Sistema según cualquiera de las reivindicaciones anteriores, donde la línea
1 O base (30') es la intersección del plano (22) de iluminación del láser principal (17) con la
cara inferior (13) de la pletina del frotador, y donde los medios de procesamiento de
datos (19) están configurados para calcular dicha línea base (30') a partir de las
posiciones de los puntos inferiores (33, 33') de las líneas láser auxiliares (16, 16') y en
función de la perspectiva de la imagen.
15
6. Procedimiento de medición del espesor de frotadores de pantógrafo,
realizándose la medición del espesor del frotador estando el tren en marcha,
caracterizado por que comprende:
iluminar, ante el paso del frotador (8) , la cara superior del frotador (8) según un
20 plano (22) paralelo al mismo para proyectar una línea láser horizontal (25) sobre dicha
cara superior;
iluminar, ante el paso del frotador (8) , oblicuamente al frotador (8) según dos
planos transversales (23, 23') al mismo, para proyectar dos líneas láser auxiliares
(26, 26') sobre el frotador (8) ;
25 capturar, ante el paso del frotador (8) , al menos una imagen del frotador (8) que
incluya las líneas láser auxiliares (26, 26') y al menos la porción de línea láser
horizontal (25) comprendida entre dichas líneas láser auxiliares (26, 26') ;
analizar la al menos una imagen tomada por los medios de captación de
imágenes (20) para, en cada imagen:
30 -detectar las líneas láser auxiliares (26, 26') ;
- detectar, tomando como referencia la posición de dichas líneas láser
auxiliares (26, 26') , la línea láser horizontal (25) ;
- calcular una línea base (30') empleada como origen para las medidas
del espesor del frotador (1 O) ;
-obtener el espesor del frotador a partir de la diferencia en coordenadas verticales entre la línea láser horizontal (25) y la línea base (30') .7. Procedimiento según la reivindicación 6, que comprende detectar el paso del
frotador (8) .
5
8. Procedimiento según cualquiera de las reivindicaciones 6 a 7, donde la línea
base (30') es la intersección del plano (22) de iluminación del láser principal (17) con la
cara inferior (13) de la pletina del frotador, y donde el cálculo de dicha línea base (30')
se realiza a partir de las posiciones de los puntos inferiores (33, 33') de las líneas láser
1 O auxiliares (16, 16') y en función de la perspectiva de la imagen.
9. Procedimiento según cualquiera de las reivindicaciones 6 a 8, que
comprende un proceso de corrección de las distorsiones de la imagen producidas por
la óptica.
15
1O. Procedimiento según cualquiera de las reivindicaciones 6 a 9, que
comprende un proceso de corrección de la distorsión trapezoidal de la imagen
producida por la perspectiva de la disposición geométrica de los elementos del
sistema.
20
11. Procedimiento según cualquiera de las reivindicaciones 6 a 1O, que
comprende, para la detección de la línea láser horizontal (25) , recortar la imagen para
eliminar la catenaria (9) .
25 12. Procedimiento según cualquiera de las reivindicaciones 6 a 11, que
comprende, para la detección de la línea láser horizontal (25) :
umbralizar la imagen, obteniendo una imagen en blanco y negro, de forma que
los píxeles cuyo valor supere la media de los de su entorno inmediato más un umbral
se saturan mientras que el resto se desaturan;
30 delimitar la imagen umbralizada a un área comprendida entre las líneas láser
auxiliares (26, 26') ;
eliminar, en la imagen delimitada, las líneas blancas que no ocupen
horizontalmente la anchura definida entre las líneas láser auxiliares (26, 26') ,
obteniendo una imagen final con la línea láser horizontal (25) ;13. Procedimiento según la reivindicación 12, que comprende adelgazar la línea láser horizontal (25) mediante el cálculo del centro de gravedad de la curva de intensidades realizado sobre la imagen original sobre la que se aplica como máscara la imagen final con la línea láser horizontal (25) .
14. Procedimiento según cualquiera de las reivindicaciones 6 a 13, que comprende realizar una corrección de la medida del espesor del frotador obtenida en función de la curvatura de la cara inferior (13) de la pletina del frotador.
Patentes similares o relacionadas:
Método de medición de una distancia, del 17 de Junio de 2020, de The Chugoku Electric Power Co., Inc: Un método de medición de una distancia que comprende: instalar un miembro de referencia en una superficie de un primer miembro metálico (P1), e instalar un miembro […]
Sensor de dilatación soldable para superficies curvadas, del 25 de Marzo de 2020, de Hottinger Brüel & Kjaer GmbH: Sensor de dilatación soldable con las siguientes características: a. un sensor de dilatación con dos secciones extremas, que están acopladas […]
Disposición de sensor de dilatación-FBG soldable, del 25 de Marzo de 2020, de HOTTINGER BALDWIN MESSTECHNIK GMBH: Disposición de sensor de dilatación-FBG con un soporte de sensor de chapa de acero y al menos un sensor de dilatación-FBG , en la que - el sensor de dilatación-FBG […]
Sensor de presión de fibra óptica que comprende cavidad y red dentro del núcleo, del 25 de Diciembre de 2019, de SAAB AB: Fibra óptica que comprende un núcleo y, de manera opcional, una cubierta , revestimiento o recubrimiento que rodea dicho núcleo, comprendiendo el núcleo […]
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica, del 9 de Octubre de 2019, de KONINKLIJKE PHILIPS N.V: Un sistema que comprende: un cuerpo de instrumento alargado ; un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor […]
Galga extensiométrica de fibra óptica compensada en temperatura, del 11 de Septiembre de 2019, de THE HONG KONG POLYTECHNIC UNIVERSITY (100.0%): Una galga extensiométrica de fibra óptica compensada en temperatura para medir deformación de una estructura anfitriona , la galga extensiométrica […]
Procedimiento para la determinación de un desperfecto de un vehículo, del 21 de Junio de 2019, de API International AG: Procedimiento para la determinación de un desperfecto de un vehículo mediante una unidad de detección óptica para la detección tridimensional de una superficie […]
 Método para analizar deformaciones en un objeto laminado y sistema acorde, del 29 de Mayo de 2019, de VESTAS WIND SYSTEMS A/S: Método para analizar un objeto laminado , que comprende:
exponer un área de superficie del objeto laminado a una radiación electromagnética coherente;
detectar […]
Método para analizar deformaciones en un objeto laminado y sistema acorde, del 29 de Mayo de 2019, de VESTAS WIND SYSTEMS A/S: Método para analizar un objeto laminado , que comprende:
exponer un área de superficie del objeto laminado a una radiación electromagnética coherente;
detectar […]