Sistema para localización con precisión de un objetivo en tierra mediante una plataforma de vuelo y método de operación asociado.
Sistema de localización de objetivo (1) configurado para determinar la posición de un objetivo (2) en la tierra pormedio de una aeronave (3) sin un dispositivo de telémetro láser,
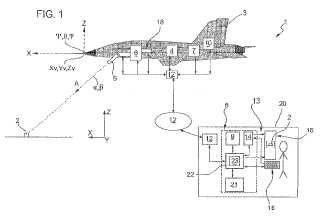
dicho sistema (1) comprende una aeronave (3), porlo menos una cámara (5) montada sobre dicha aeronave (3) y dirigida de acuerdo con su propio eje de rastreo (A),medios de movimiento (6) configurados para regular la posición espacial de dicha cámara (5) con respecto a dichaaeronave (3) de tal manera que dicho eje de rastreo (A) permanece dirigido sobre el objetivo (2) durante el vuelo dela aeronave (3), medios de control (8) para pilotear temporalmente la aeronave (3) a lo largo de un segmento devuelo rectilíneo (TR) por encima del área a monitorear, primer medio de sensor (4) que mide los ángulos de Rumbo(Φ), Campo (θ) y Rodillo (φ) de la aeronave (3) para determinar la altitud de la aeronave (3) en sí misma, segundomedio de sensor para detectar los ángulos de rastreo Panorámicos (α) y de Inclinación (ß) de dicha cámara (5),medios de detección (7) configurados para detectar la posición de dicha aeronave (3), y medios de procesamiento(22) capaces de localizar un objetivo (2) presente en la tierra y enmarcado por dicha cámara (5);dicho sistema (1) se caracteriza porque dichos medios de procesamiento (22) comprenden medios de cálculo (23)configurados para:
- determinar la posición espacial de dicho eje de rastreo (A) en un primer (t1) y segundo tiempos (t2) con base en losángulos de Rumbo (Φ), Campo (θ) y Rodillo (φ) de la aeronave (3), los ángulos Panorámicos (α) y de Inclinación (ß)de dicha cámara (5) y las posiciones de la aeronave (3) en los mismos dos tiempos (t1)(t2);
- calcular durante el vuelo de la aeronave (3) a lo largo de dicho segmento de vuelo rectilíneo (TR), en por lo menosdichos dos tiempos sucesivos (tl)(t2), por lo menos dos puntos de intersección (P1(i))(P2(i)) entre dicho eje de20 rastreo (A) y un plano teórico (PTi) asociado con la tierra y que tiene una altitud inicial actual (QTi);
- variar de forma repetida la altitud (QTi) de dicho plano teórico (PTi) por un valor actual (ΔQT) y calcular, en cadadicha variación de altitud (ΔQT) de dicho plano teórico (PTi), la posición de dichos por lo menos dos puntos deintersección (P1(i))(P2(i)) en el plano teórico (PTi) en sí mismo, hasta que se alcanza una primera condición delocalización con precisión, en la que una primera distancia (Dx) entre los dos puntos de intersección (P1(i)), (P2(i))tiene una distancia calculada menor de un primer umbral preestablecido (SX);
- asignar la altitud (QTi) del plano teórico (PTi) que satisface dicha primera condición de localización con precisión ala posición del objetivo localizado.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IT2007/000740.
Solicitante: SELEX ES S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Piemonte 60 00187 Roma (RM) ITALIA.
Inventor/es: MANETTI,VALERIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
- G01C3/08 G01C […] › G01C 3/00 Medida de distancias en línea de vista; Telémetros ópticos (cintas, cadenas o ruedas para la medida de la longitud G01B 3/00; sistemas de triangulación activos, p. ej. que utilizan la transmisión y reflexión de ondas electromagnéticas que no sean ondas de radio, G01S 17/48). › Utilización de detectores de radiación eléctricos.
- G01S11/12 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 11/00 Sistemas para determinar la distancia o la velocidad que no utilizan la reflexión o la rerradiación (establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia G01S 5/00). › que utilizan ondas electromagnéticas que no sean ondas de radio.
- G01S3/786 G01S […] › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › manteniéndose el estado deseado automáticamente.
- G01S5/16 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2440252_T3.pdf
Fragmento de la descripción:
Sistema para localización con precisión de un objetivo en tierra mediante una plataforma de vuelo y método de operación asociado.
CAMPO TÉCNICO
La presente invención se relaciona con un sistema para localización con precisión de un objetivo en tierra mediante una plataforma de vuelo y método de operación asociado.
En particular, la presente invención se relaciona con un sistema que es capaz de localizar un objetivo por medio de una plataforma de vuelo que corresponde a una aeronave controlada por un piloto o, alternativamente, un denominado UAV (Vehículo Aéreo no Tripulado, por su sigla en inglés) , cuya posición se controla desde una estación de control remoto y a cuyo tratamiento se hace aquí referencia explícita, pero sin ninguna pérdida en generalidad.
TÉCNICA ANTECEDENTE
Como se sabe, los sistemas utilizados actualmente para misiones denominadas RISTA (Reconocimiento, Inteligencia, Vigilancia & Adquisición de Objetivos, por su sigla en inglés) , para localización de un objetivo en un área monitoreada mediante una plataforma de vuelo, normalmente incluyen: una plataforma de vuelo compuesta de una aeronave, una cámara montada sobre la aeronave habilitada para tomar imágenes de la tierra abajo y un dispositivo de movimiento de cámara, que es capaz de ajustar los ángulos de rastreo a cada momento, dentro del espacio de eje de rastreo de cámara.
Los sistemas de localización mencionados anteriormente también comprenden un dispositivo capaz de detectar la posición de la aeronave en cada instante, normalmente consiste de un receptor GPS (Sistema de Posicionamiento Global, por su sigla en inglés) , y un dispositivo de medición que corresponde a un dispositivo telémetro láser, que es capaz de medir la distancia entre la aeronave y el objetivo enmarcado por la cámara.
El sistema también comprende una unidad de procesamiento central que incluye medios de almacenamiento que contienen un mapa cartográfico digital que representa la tierra a vigilar en un sistema de referencia Cartesiano X, Y,
Z, y una unidad de cálculo que es capaz de calcular la posición del objetivo en tierra en función de una serie de parámetros, tales como: la posición real de la aeronave, los ángulos que identifican la altitud de la aeronave con respecto a la vertical local y la dirección de la proa de la aeronave con respecto al norte geográfico, los ángulos de rastreo de la cámara y, por último, la medición de la distancia entre la aeronave y el objetivo enmarcado por la cámara.
En los sistemas descritos anteriormente, se encuentra que el uso del telémetro láser es muy desventajoso, ya que además de afectar fuertemente el costo total de fabricar el sistema de localización, es particularmente pesado y complejo de controlar, provocando por lo tanto un aumento en la complejidad estructural y de fabricación del sistema electrónico dedicado a controlar la plataforma de vuelo cuando esa está en vuelo.
Para este fin, se han elaborado sistemas de localización de objetivo que funcionan sin la ayuda de un dispositivo de telémetro láser, en el que la posición del objetivo se determina sobre la base de la altitud de la tierra indicada en el mapa cartográfico en lugar de la distancia entre la aeronave y el objetivo que se va a detectar. Sin embargo, aunque estos sistemas de localización de objetivo son más baratos, en general, que los sistemas que utilizan un dispositivo de telémetro láser, tienen la desventaja significativa de no ser muy precisos, ya que están implícitamente afectados por un error, que se correlaciona directamente con el error de corte introducido por los datos de altitud de la tierra contenidos en el mapa cartográfico digital.
En el caso en cuestión, las pruebas experimentales han demostrado que el error de altitud resulta en un error de localización en la posición del objetivo de aproximadamente 25-50 m en los casos más favorables, y hasta 200-400 m en casos de corte insuficiente de los datos de altitud contenidos en el mapa cartográfico digital.
El documento EP1783455 describe un sistema de reconocimiento en vuelo que comprende giroscopios que tienen 45 por lo menos dos grados de libertad; una matriz de sensores de luz posicionados sobre los giroscopios para ser dirigidos por los mismos dentro de por lo menos dos grados de libertad; medios de almacenamiento de mapas para almacenar un Mapa de Elevación Digital de un área de interés, dividido en porciones; sistema de navegación inercial para proporcionar en tiempo real, a una unidad de control de giroscopios, datos de navegación y orientación de la aeronave con respecto a un sistema de ejes global predefinido; unidad de selección de Porción para seleccionar,
una a la vez, otra porción de área desde el área de interés, y medios servo para dirigir los giroscopios. El sistema utiliza datos del sistema de navegación inercial y del mapa de elevación digital para calcular en tiempo real la
dirección a las porciones de área seleccionadas, y mantener la dirección durante la integración de luces desde el terreno, y producir las imágenes correspondientes de las porciones de área.
El documento FR2798999 describe un aparato y método para determinar la posición de los objetivos terrestres mediante el uso de un aeroplano. El método de localización de objeto incluye: designar un objeto en tierra en una imagen proporcionada por una cámara en una aeronave; rastrear el objeto mediante reconocimiento de forma en la imagen de la cámara, que se estabiliza de tal manera que la línea de visión permanece indicada en el objeto; una secuencia de operaciones de medición para el ángulo de elevación del objeto con respecto a la aeronave, de la posición de la aeronave y su orientación; y cálculo de la distancia y altitud relativa con la ruta de la secuencia, cada cálculo tiene en cuenta el grupo de mediciones llevadas a cabo previamente mediante un filtro estadístico tal como un filtro Kalman.
El documento US6281970 B1 describe un sistema para detección y localización de incendios utilizando un sensor aerotransportado equipado con un escáner infrarrojo pasivo (IR) . La posición del sensor y altitud se determinan mediante una unidad GPS/RDF o GPS/IMU, y se computa la dirección desde el sensor hasta el punto caliente detectado por IR. A partir de esta información, el sensor resuelve la trigonometría para calcular la ubicación “virtual” del fuego en el plano horizontal de una baliza terrestre. Un error de posición de fuego surge de la diferencia entre la altitud del sensor por encima del suelo del bosque y las diferencias de elevación en el punto caliente de fuego (por ejemplo en terreno montañoso) . Al incorporar los datos de mapa topográficos, es posible proporcionar el error corregido o minimizado en el punto caliente de fuego detectado.
DESCRIPCIÓN DE LA INVENCIÓN
El objeto de la presente invención es por lo tanto incorporar un sistema de localización con precisión de un objetivo por medio de una plataforma de vuelo que, por un lado, está desprovisto del dispositivo de telémetro láser y por lo tanto es económico en fabricación y, por otro lado, garantiza la precisión en la posición del objetivo que tiene un orden de precisión sustancialmente igual que aquel que se puede lograr con los sistemas que utilizan un dispositivo de telémetro láser.
De acuerdo con la presente invención, se incorpora un sistema de localización de objetivo tal como se propone en la reivindicación 1 y preferiblemente, pero no necesariamente, en cualquiera de las reivindicaciones directamente o indirectamente dependientes de la reivindicación 1.
De acuerdo con la presente invención, también se proporciona un método de localización de objetivo, tal como se propone en la reivindicación 7 y preferiblemente, pero no necesariamente, en cualquiera de las reivindicaciones directamente o indirectamente dependientes de la reivindicación 7.
De acuerdo con la presente invención, también se incorpora un ordenador, tal como se propone en la reivindicación 12.
Por último, de acuerdo con la presente invención, se incorpora un producto de software, tal como se propone en la reivindicación 13.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
La presente invención se describirá ahora con referencia a los dibujos adjuntos, que ilustran un ejemplo no limitativo de realización, donde:
- La Figura 1 muestra esquemáticamente un sistema para localizar un objetivo en tierra, incorporado de acuerdo con los principios de la presente invención,
- La Figura 2 es la primera parte de un diagrama de flujo de las operaciones implementadas por el sistema mostrado en la Figura 1 durante su operación,
... [Seguir leyendo]
Reivindicaciones:
1. Sistema de localización de objetivo (1) configurado para determinar la posición de un objetivo (2) en la tierra por medio de una aeronave (3) sin un dispositivo de telémetro láser, dicho sistema (1) comprende una aeronave (3) , por lo menos una cámara (5) montada sobre dicha aeronave (3) y dirigida de acuerdo con su propio eje de rastreo (A) , medios de movimiento (6) configurados para regular la posición espacial de dicha cámara (5) con respecto a dicha aeronave (3) de tal manera que dicho eje de rastreo (A) permanece dirigido sobre el objetivo (2) durante el vuelo de la aeronave (3) , medios de control (8) para pilotear temporalmente la aeronave (3) a lo largo de un segmento de vuelo rectilíneo (TR) por encima del área a monitorear, primer medio de sensor (4) que mide los ángulos de Rumbo (L) , Campo (8) y Rodillo (<) de la aeronave (3) para determinar la altitud de la aeronave (3) en sí misma, segundo medio de sensor para detectar los ángulos de rastreo Panorámicos (a) y de Inclinación ( ) de dicha cámara (5) , medios de detección (7) configurados para detectar la posición de dicha aeronave (3) , y medios de procesamiento (22) capaces de localizar un objetivo (2) presente en la tierra y enmarcado por dicha cámara (5) ;
dicho sistema (1) se caracteriza porque dichos medios de procesamiento (22) comprenden medios de cálculo (23) configurados para:
-determinar la posición espacial de dicho eje de rastreo (A) en un primer (t1) y segundo tiempos (t2) con base en los ángulos de Rumbo (L) , Campo (8) y Rodillo (<) de la aeronave (3) , los ángulos Panorámicos (a) y de Inclinación ( ) de dicha cámara (5) y las posiciones de la aeronave (3) en los mismos dos tiempos (t1) (t2) ;
- calcular durante el vuelo de la aeronave (3) a lo largo de dicho segmento de vuelo rectilíneo (TR) , en por lo menos dichos dos tiempos sucesivos (tl) (t2) , por lo menos dos puntos de intersección (P1 (i) ) (P2 (i) ) entre dicho eje de rastreo (A) y un plano teórico (PTi) asociado con la tierra y que tiene una altitud inicial actual (QTi) ;
- variar de forma repetida la altitud (QTi) de dicho plano teórico (PTi) por un valor actual (LQT) y calcular, en cada dicha variación de altitud (LQT) de dicho plano teórico (PTi) , la posición de dichos por lo menos dos puntos de intersección (P1 (i) ) (P2 (i) ) en el plano teórico (PTi) en sí mismo, hasta que se alcanza una primera condición de localización con precisión, en la que una primera distancia (Dx) entre los dos puntos de intersección (P1 (i) ) , (P2 (i) ) tiene una distancia calculada menor de un primer umbral preestablecido (SX) ;
- asignar la altitud (QTi) del plano teórico (PTi) que satisface dicha primera condición de localización con precisión a la posición del objetivo localizado.
2. Sistema de acuerdo con la reivindicación 1, en el que dichos medios de cálculo (23) se configuran para determinar dicha primera distancia (Dx) : al calcular la distancia entre dos puntos (P1’ (i) , P2’ (i) ) que se obtienen desde la proyección de dicho primer (P1 (i) ) y respectivamente segundo (P2 (i) ) punto de intersección en un plano (PT’) sustancialmente ortogonal a dicho plano teórico (PTi) y que pasa a través de una línea coincidente con el segmento de vuelo rectilíneo (TR) volado por la aeronave (3) .
3. Sistema de acuerdo con las reivindicaciones 1 o 2, que comprende un sistema de rastreo de video (13) configurado para controlar dichos medios de movimiento (6) para mover dicha cámara (5) en el espacio para mantener su eje de rastreo (A) dirigido sobre dicho objetivo (2) .
4. Sistema de acuerdo con cualquiera de las reivindicaciones previas, que comprende medios de memoria (21) que contienen por lo menos un mapa cartográfico digital, en el que cada punto del territorio representado por el mapa cartográfico digital se asocia asociado con una altitud terrestre; dicho plano teórico (PTi) tiene una altitud teórica inicial (QTi) , que indica la altura del plano teórico (PTi) con respecto a un plano de referencia actual (PTO) , posicionado en altitud cero.
5. Sistema de acuerdo con cualquiera de las reivindicaciones previas, en donde dichos medios de cálculo (23) se configuran para medir el ángulo de Rumbo (Li) de dicha aeronave (3) en por lo menos dos tiempos sucesivos (t1’) (t2’) durante el vuelo de la aeronave (3) a lo largo de dicho segmento de vuelo rectilíneo (TR) , y calcular en dichos dos tiempos sucesivos (t1’) (t2’) por lo menos dos puntos de intersección (C1 (i) ) (C2 (i) ) entre dicho eje de rastreo (A) y un plano teórico (PTi) asociado con la tierra y que tiene una altitud actual (QTR) , dichos medios de cálculo (23) se configuran para variar de forma repetida los ángulos de Rumbo (Li) medidos en dichos dos tiempos sucesivos (t1’) , (t2’) por un valor actual (LL) , y calcular la posición de dichos dos puntos de intersección (C1 (i) ) (C2 (i) ) sobre dicho plano teórico actual (PTi) en cada dicha variación (LL) , hasta que se alcanza una segunda condición de localización con precisión, en la que una segunda distancia (Dy) entre dichos dos puntos de intersección (C1 (i) ) (C2 (i) ) tiene una distancia calculada menor que un segundo umbral preestablecido (SY) ; dichos medios de cálculo (23) se configuran para asignar un componente a lo largo de un eje Y de uno de los puntos de intersección (C1 (i) ) (C2 (i) ) que satisfacen dicha segunda condición de localización con precisión a la posición del objetivo localizado a lo largo de dicho eje Y.
6. Sistema de acuerdo con la reivindicación 5, en donde dichos medios de cálculo (23) se configuran para determinar dicha segunda distancia (Dy) al calcular la distancia entre dos puntos (C1’ (i) ) (C2’ (i) ) , que se obtienen desde la proyección de dicho primer punto de intersección (C1 (i) ) y respectivamente segundo punto de intersección (C2 (i) ) en un plano (PV) sustancialmente ortogonal a dicha ruta rectilínea (TR) volada por dicha aeronave (3) .
7. Un método de localización de objetivo para determinar la posición de un objetivo (2) en la tierra sin un dispositivo de telémetro láser, por medio de un sistema (1) que comprende una aeronave (3) , por lo menos una cámara (5) montada sobre dicha aeronave (3) y dirigida de acuerdo con su propio eje de rastreo (A) , medios de movimiento (6) configurados para regular la posición espacial de dicha cámara (5) con respecto a dicha aeronave (3) de tal manera que dicho eje de rastreo (A) permanece dirigido sobre el objetivo (2) durante el vuelo de la aeronave (3) , medios de control (8) para pilotear temporalmente el vuelo de la aeronave (3) a lo largo de un segmento de vuelo rectilíneo (TR) , y medios de procesamiento (22) configurados para localizar la posición de dicho objetivo (2) ; el método comprende:
- medir los ángulos de Rumbo (L) , Campo (8) y Rodillo (<) de la aeronave (3) para determinar la altitud de la aeronave (3) ;
- detectar los ángulos de rastreo Panorámicos (a) y de Inclinación ( ) de dicha cámara (5) y la posición de dicha aeronave (3) ; el método se caracteriza porque comprende:
- determinar la posición espacial de dicho eje de rastreo (A) en un primer (t1) y segundo (t2) tiempos de acuerdo con los ángulos de Rumbo (L) , Campo (8) y Rodillo (<) de dicha aeronave (2) , los ángulos Panorámicos (a) y de Inclinación (<) de dicha cámara (5) y la posición espacial asumida por la aeronave (3) en los mismos dos tiempos (t1) (t2) ;
- calcular (130, 140) , en por lo menos dichos dos tiempos sucesivos (t1) (t2) durante el movimiento de la aeronave
(3) a lo largo de dicho segmento de vuelo rectilíneo (TR) , por lo menos dos puntos de intersección respectivos (P1 (i) ) (P2 (i) ) entre dicho eje de rastreo (A) y un plano teórico (PTi) asociado con la tierra y que tiene una altitud inicial actual (QTi) ;
- variar de forma repetida dicha altitud (QTi) de dicho plano teórico (PTi) por un valor actual (LQT) ;
- calcular, en cada dicha variación (LQT) en altitud del plano teórico (PTi) , la posición de dichos por lo menos dos puntos de intersección (P1 (i) ) (P2 (i) ) en el mismo plano teórico (PTi) , hasta que se alcanza una primera condición de localización con precisión, que se satisface cuando una primera distancia (Dx) entre los dos puntos de intersección (P1 (i) ) (P2 (i) ) tiene una distancia calculada menor que un primer umbral preestablecido SX) ;
- asignar la altitud (QTi) del plano teórico (PTi) que satisface dicha primera condición de localización con precisión a la posición del objetivo localizado (2) .
8. Método de acuerdo con la reivindicación 7, en el que dicha fase de determinar dicha primera distancia (Dx) comprende la fase de calcular una distancia entre dos puntos (P1’ (i) ) (P2’ (i) ) obtenida desde la proyección de dicho primer (P1 (i) ) y respectivamente segundo punto de intersección (P2 (i) ) en un plano (PT’) sustancialmente ortogonal a dicho plano teórico (PTi) y que pasa a través de una línea coincidente con el segmento de vuelo rectilíneo (TR) volado por la aeronave (3) .
9. Método de acuerdo con la reivindicación 7 u 8, en donde dicho sistema (1) comprende medios de memoria (21) que contienen un mapa cartográfico digital en el que cada punto del territorio representado por el mapa cartográfico digital se asocia con una altitud terrestre; el método comprende la fase de establecer dicho plano teórico inicial PTi asociado con el área a monitorear y que tiene una altitud teórica inicial (QTi) , que indica la altura del plano teórico (PTi) con respecto a un plano de referencia actual (PTO) , posicionado en altitud cero.
10. Método de acuerdo con cualquiera de las reivindicaciones 7 a 9, que comprende las fases de:
- medir en por lo menos dos tiempos sucesivos (t1’) (t2’) durante el vuelo de la aeronave (3) a lo largo de dicho segmento de vuelo (TR) , el ángulo de Rumbo (Li1, Li2) de dicha aeronave (3) ,
- calcular durante dichos tiempos sucesivos (t1’) (t2’) , por lo menos dos puntos de intersección (C1 (i) ) (C2 (i) ) entre dicho eje de rastreo (A) y un plano teórico (PTi) asociado con la tierra y que tiene una altitud actual (QTR) ,
- variar de forma repetida los ángulos medidos de Rumbo (Li1, Li2) por un valor actual (LL) ,
- calcular la posición de dichos dos puntos de intersección (C1 (i) ) (C2 (i) ) en dicho plano teórico actual (PTi) en cada dicha variación (LL) , hasta que se alcanza una segunda condición de localización con precisión, en la que una segunda distancia (Dy) entre dichos dos puntos de intersección (C1 (i) ) (C2 (i) ) tiene una distancia calculada menor que un segundo umbral preestablecido (SY) , y
- asignar un componente a lo largo del eje Y de uno de los puntos de intersección (C1 (i) ) (C2 (i) ) que satisfacen dicha segunda condición de localización con precisión a la posición del objetivo localizado a lo largo de dicho eje Y.
11. Método de acuerdo con la reivindicación 10, que comprende la fase de determinar dicha segunda distancia (Dy) : al calcular la distancia entre dos puntos de intersección (C1’ (i) ) (C2’ (i) ) , que se obtienen desde la proyección de dicho primer (C1 (i) ) y respectivamente segundo punto de intersección (C2 (i) ) en un plano (PV) sustancialmente ortogonal a dicha ruta rectilínea (TR) volada por dicha aeronave (3) .
12. Ordenador caracterizado porque implementa un método como se indica en cualquiera de las reivindicaciones 7 a 11.
13. Producto de software que se puede cargar en la memoria de un medio de procesamiento y se diseña para implementar, cuando se ejecuta, el método de acuerdo con cualquiera de las reivindicaciones 7 a 11.
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]