Sistema de reaprovisionamiento de combustible en vuelo asistido.
Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) configurado para aprovisionar decombustible una aeronave de toma (5);
comprendiendo el sistema de reaprovisionamiento de combustible en vueloasistido una aeronave de toma de combustible (5) provista con una sonda (6), una aeronave cisterna (2), y una cesta(4) conectada con la aeronave cisterna (2) mediante una manguera (3) y arrastrada por la aeronave cisterna (2) enuna dirección de desplazamiento (WA) predeterminada;
estando dicho sistema de reaprovisionamiento de combustible en vuelo asistido (1) caracterizado por comprenderun sistema de control de vuelo electrónico (7) que comprende:
- tres módulos de determinación de posición de DGPS / RTK (Differential Global Positioning System / Real TimeKinematic, Sistema Global de Determinación de Posición Diferencial / Cinemática en Tiempo Real) (10) (11) (9)instalados respectivamente en dicha cesta (4), dicha aeronave de toma (5) y dicha aeronave cisterna (2) paradeterminar una primera cantidad que indica una primera distancia (B-C) entre dicha cesta (4) y dicha sonda (6); unasegunda cantidad que indica una segunda distancia (A-B) entre dicha aeronave cisterna (2) y dicha cesta (4); y unatercera cantidad que indica una tercera distancia (A-C) entre dicha aeronave cisterna (2) y dicha sonda (6); uno dedichos tres módulos de determinación de posición de DGPS / RTK (10) (11) (9) comprende un módulo maestro dedeterminación de posición de DGPS / RTK configurado para determinar y transmitir su propia posición absolutainstantánea (PA) y una corrección diferencial (C-RTK); los otros dos módulos de determinación de posición deDGPS / RTK comprenden respectivamente un módulo esclavo de determinación de posición de DGPS / RTKconfigurado para recibir dicha posición absoluta (PA) y dicha corrección diferencial (C-RTK), y para determinar supropia distancia con respecto a dicho módulo maestro de determinación de posición de DGPS / RTK sobre la basede dicha posición absoluta (PA) recibida y dicha corrección diferencial (C-RTK) recibida;
- unos medios de control electrónico (15) configurados para cooperar con dichos tres módulos de determinación deposición (9) (10) (11) para determinar, como una función de dicha primera (B-C), dicha segunda (A-B) y dicha tercera(A-C) distancia, el movimiento necesario de dicha cesta (4) y / o el movimiento necesario de dicha aeronave de toma(5) para acoplar la cesta (4) con la sonda (6);
- unos medios de control (18, 19) montados sobre la cesta (4) y configurados para mover la cesta (4) en una o másdirecciones transversales de forma transversal con respecto a la dirección de desplazamiento (WA);
estando además dichos medios de control electrónico (15) configurados para:
- recibir dichas dos distancias que se calculan a partir de dichos módulos esclavos de determinación de posición deDGPS / RTK;
- calcular la distancia entre dichos módulos esclavos de determinación de posición sobre la base de las dosdistancias calculadas recibidas; estando dichas tres distancias calculadas asociadas respectivamente con dichaprimera (B-C), dicha segunda (A-B), y dicha tercera distancia (A-C);- controlar dichos medios de control (18, 19) sobre la base de dicha primera (B-C), dicha segunda (A-B) y dichatercera (A-C) distancia, con el fin de mover la cesta (4) en una o más direcciones transversales de forma transversalcon respecto a dicha dirección de desplazamiento (WA) para alinear el eje longitudinal de la cesta (4) con el ejelongitudinal de dicha sonda (6);
- determinar una situación de peligro y generar una primera señal de alarma (AL2), que indica que dicha aeronavede toma (5) está acercándose peligrosamente a dicha aeronave cisterna (2), cuando dicha tercera distancia (AC) seencuentra por debajo de un primer umbral predeterminado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10164829.
Solicitante: SELEX ES S.p.A.
Nacionalidad solicitante: Italia.
Dirección: Via Piemonte 60 Roma ITALIA.
Inventor/es: MANETTI,VALERIO, DEGIORGIS,PIERO GIORGIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D39/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › Repostaje en vuelo (llenado o vaciado de depósitos de combustible B64D 37/14).
- G01S17/42 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
PDF original: ES-2437673_T3.pdf
Fragmento de la descripción:
Sistema de reaprovisionamiento de combustible en vuelo asistido La presente invención se refiere a un sistema de reaprovisionamiento de combustible en vuelo de manguera y cesta.
Según se sabe, los sistemas de reaprovisionamiento de combustible en vuelo de manguera y cesta comprenden: una aeronave cisterna equipada con una manguera de reaprovisionamiento de combustible dotada sobre su extremo libre con una cesta; y una aeronave de toma de combustible equipada con una sonda rígida diseñada para conectarse con la cesta para permitir que la aeronave cisterna reaprovisione de combustible la aeronave de toma.
El procedimiento adoptado por los sistemas de reaprovisionamiento de combustible de manguera y cesta convencionales comprende sustancialmente: una etapa de determinación de posición de aeronave cisterna, en la que la aeronave cisterna sigue una trayectoria predeterminada, normalmente una línea recta, a una velocidad constante de 200 a 350 nudos, dependiendo de la aeronave implicada, con el fin de moverse de una forma tan predecible como sea posible; una etapa de aproximación o de atraque, en la que el piloto de la aeronave de toma mueve la aeronave a una zona de recepción para atracar con la aeronave cisterna; una etapa de acoplamiento de cesta-sonda, en la que el piloto de la aeronave de toma controla la aeronave de forma manual para alinear la sonda con la cesta y para mover la aeronave en posición para conectar la sonda con la cesta; una etapa de reaprovisionamiento de combustible, en la que el combustible se transfiere de la aeronave cisterna a la aeronave de toma a través del circuito de reaprovisionamiento de combustible, en particular la cesta-sonda; y una etapa de liberación de cesta-sonda.
El procedimiento anterior comporta numerosos problemas técnicos.
En primer lugar, el acoplamiento de cesta-sonda con éxito, y el tiempo que lleva hacerlo, dependen de diversos factores, tal como: las condiciones atmosféricas; la visibilidad; y el nivel de estrés y la pericia de los pilotos de la aeronave de toma en la realización de la maniobra de atraque / acoplamiento manual.
En segundo lugar, el acoplamiento de cesta-sonda solo tiene éxito cuando la velocidad relativa de las dos aeronaves, a lo largo de los últimos pocos segundos antes del acoplamiento, varía entre 2 y 5 nudos. De hecho, por debajo de 2 nudos, la sonda no puede conectarse con la cesta; mientras que unas velocidades de más de 5 nudos pueden dar como resultado un atraque peligroso de la aeronave cisterna y la de toma.
En los sistemas de reaprovisionamiento de combustible del tipo que se describe, el acoplamiento de cesta-sonda es, por lo tanto, una operación crítica que, además de los márgenes de fallo implicados, es una fuente de estrés intenso para los pilotos que realizan la maniobra, y no permite calcular el tiempo de reaprovisionamiento de combustible, lo que obviamente supone graves problemas cuando toda una flota ha de reaprovisionarse de combustible dentro de un tiempo total máximo que está asociado con la autonomía de combustible de las aeronaves en la flota.
El documento US2005/114023 divulga un método, aparato y sistema que tiene un estimador de varianza mínima de las estimadas de estado habitualmente en realizaciones de navegación en las que un módulo de detección de fallos de sensor y / o de efector está adaptado para ejecutar etapas de prueba residual usando la Prueba Secuencial de Razón de Probabilidad de Wald de Múltiples Hipótesis, la Prueba Secuencial de Razón de Probabilidad de Shir y ayev de Múltiples Hipótesis, la prueba de Chi-Cuadrado y combinaciones de las mismas para determinar la probabilidad de las apariciones de fallos de sensor y / o de accionador y, a continuación de lo anterior, aislar los efectos del uno o más fallos identificados a partir de las estimadas de estado. Además, el documento divulga un sistema de guiado para un reaprovisionamiento de combustible aéreo autónomo sobre la base de unos módulos de determinación de posición de GPS instalados tanto en la cesta como en la aeronave receptora.
El documento WO9807623 divulga un sistema de reaprovisionamiento de combustible en vuelo asistido que realiza una búsqueda y guiado autónomos hacia un punto de encuentro de la aeronave cisterna y la aeronave que ha de reaprovisionarse de combustible por medio de unos receptores de sistema de navegación por satélite.
Un objeto de la presente invención es la provisión de un sistema de reaprovisionamiento de combustible en vuelo diseñado para eliminar los inconvenientes anteriores.
De acuerdo con la presente invención, se proporciona un sistema de reaprovisionamiento de combustible en vuelo asistido según la reivindicación 1 y, preferible aunque no necesariamente, en una cualquiera de las reivindicaciones que dependen directamente o indirectamente de la reivindicación 1.
Una realización no limitante de la presente invención se describirá a modo de ejemplo con referencia a los dibujos adjuntos, en los que:
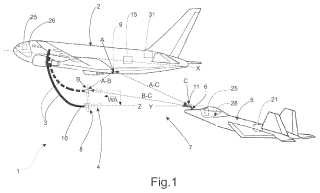
la figura 1 muestra un diagrama esquemático de un sistema de reaprovisionamiento de combustible en vuelo asistido de acuerdo con las enseñanzas de la presente invención;
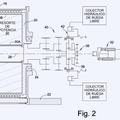
la figura 2 muestra un diagrama esquemático de un sistema de ayuda de acoplamiento de cesta-sonda que forma parte del sistema de reaprovisionamiento de combustible en vuelo asistido en la figura 1;
la figura 3 muestra una vista lateral en sección parcial esquemática, con partes retiradas con fines de claridad, de un conjunto de control de cesta del sistema de la figura 1;
la figura 4 muestra una vista frontal en sección parcial esquemática, con partes retiradas con fines de claridad, del conjunto de control de cesta de la figura 3;
la figura 5 muestra un diagrama esquemático de un ejemplo de una interfaz de usuario del sistema de ayuda de acoplamiento de cesta-sonda de la figura 2;
las figuras 6 y 7 muestran un diagrama de flujo de las operaciones de acoplamiento de cesta-sonda realizadas por el sistema de reaprovisionamiento de combustible en vuelo asistido de la figura 1;
la figura 8 muestra un diagrama de flujo de los cálculos de distancia diferencial realizados por el sistema de ayuda de acoplamiento de cesta-sonda;
las figuras 9 y 10 muestran diagramas esquemáticos de dos variantes del sistema de reaprovisionamiento de combustible en vuelo asistido.
El número 1 en la figura 1 indica, como un todo, un sistema de reaprovisionamiento de combustible en vuelo asistido que comprende una aeronave cisterna de combustible 2 equipada con una manguera de combustible 3, que se extiende a partir de la aeronave cisterna 2 de tal modo que, en vuelo, una porción de extremo de la manguera 3 se coloca sustancialmente en paralelo al eje longitudinal X de la aeronave cisterna 2, y se conecta en su extremo libre con una cesta 4.
El sistema de reaprovisionamiento de combustible en vuelo asistido 1 también comprende una aeronave de toma de combustible 5 equipada con una sonda rígida 6 que, preferible aunque no necesariamente, sobresale a lo largo de un eje longitudinal Z con respecto a la parte frontal del fuselaje de la aeronave de toma 5, y está conformada para acoplarse con la cesta 4 para permitir que la aeronave cisterna 2 suministre a la aeronave de toma 5 la cantidad requerida de combustible.
En el ejemplo de la figura 1 y 2, el sistema de reaprovisionamiento de combustible 1 comprende un sistema de ayuda de acoplamiento de cesta-sonda 7 configurado para determinar una distancia entre la cesta 4 y la sonda 6; una distancia entre la aeronave cisterna 2 y la cesta 4; una distancia entre la aeronave cisterna 2 y la aeronave de toma 5; y el desplazamiento de la cesta 4 y / o de la aeronave de toma 5 necesario para conseguir el acoplamiento de cesta-sonda, como una función de las tres distancias.
En el ejemplo de la figura 1, el sistema de ayuda de acoplamiento de cesta-sonda 7 comprende tres módulos de determinación de posición, uno montado en la aeronave cisterna 2, uno en el interior de la cesta 4, y uno montado en la aeronave 5, preferible aunque no necesariamente en la sonda 6.
En la realización de la figura 1, uno de los tres módulos de determinación de posición comprende un módulo maestro de determinación de posición por satélite diferencial 9 configurado para determinar su propia posición absoluta; y los otros dos módulos de determinación de posición comprenden unos módulos esclavos de determinación de posición por satélite diferencial 10, 11 respectivos, cada uno configurado para determinar su propia distancia con respecto al módulo maestro de determinación de posición por satélite diferencial 9.
En el ejemplo que se muestra, el módulo maestro de determinación... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) configurado para aprovisionar de combustible una aeronave de toma (5) ; comprendiendo el sistema de reaprovisionamiento de combustible en vuelo asistido una aeronave de toma de combustible (5) provista con una sonda (6) , una aeronave cisterna (2) , y una cesta (4) conectada con la aeronave cisterna (2) mediante una manguera (3) y arrastrada por la aeronave cisterna (2) en una dirección de desplazamiento (WA) predeterminada;
estando dicho sistema de reaprovisionamiento de combustible en vuelo asistido (1) caracterizado por comprender un sistema de control de vuelo electrónico (7) que comprende:
- tres módulos de determinación de posición de DGPS / RTK (Differential Global Positioning System / Real Time Kinematic, Sistema Global de Determinación de Posición Diferencial / Cinemática en Tiempo Real) (10) (11) (9) instalados respectivamente en dicha cesta (4) , dicha aeronave de toma (5) y dicha aeronave cisterna (2) para determinar una primera cantidad que indica una primera distancia (B-C) entre dicha cesta (4) y dicha sonda (6) ; una segunda cantidad que indica una segunda distancia (A-B) entre dicha aeronave cisterna (2) y dicha cesta (4) ; y una tercera cantidad que indica una tercera distancia (A-C) entre dicha aeronave cisterna (2) y dicha sonda (6) ; uno de dichos tres módulos de determinación de posición de DGPS / RTK (10) (11) (9) comprende un módulo maestro de determinación de posición de DGPS / RTK configurado para determinar y transmitir su propia posición absoluta instantánea (PA) y una corrección diferencial (C-RTK) ; los otros dos módulos de determinación de posición de DGPS / RTK comprenden respectivamente un módulo esclavo de determinación de posición de DGPS / RTK configurado para recibir dicha posición absoluta (PA) y dicha corrección diferencial (C-RTK) , y para determinar su propia distancia con respecto a dicho módulo maestro de determinación de posición de DGPS / RTK sobre la base de dicha posición absoluta (PA) recibida y dicha corrección diferencial (C-RTK) recibida;
- unos medios de control electrónico (15) configurados para cooperar con dichos tres módulos de determinación de posición (9) (10) (11) para determinar, como una función de dicha primera (B-C) , dicha segunda (A-B) y dicha tercera (A-C) distancia, el movimiento necesario de dicha cesta (4) y / o el movimiento necesario de dicha aeronave de toma
(5) para acoplar la cesta (4) con la sonda (6) ;
- unos medios de control (18, 19) montados sobre la cesta (4) y configurados para mover la cesta (4) en una o más direcciones transversales de forma transversal con respecto a la dirección de desplazamiento (WA) ;
estando además dichos medios de control electrónico (15) configurados para:
- recibir dichas dos distancias que se calculan a partir de dichos módulos esclavos de determinación de posición de DGPS / RTK;
- calcular la distancia entre dichos módulos esclavos de determinación de posición sobre la base de las dos distancias calculadas recibidas; estando dichas tres distancias calculadas asociadas respectivamente con dicha primera (B-C) , dicha segunda (A-B) , y dicha tercera distancia (A-C) ;
- controlar dichos medios de control (18, 19) sobre la base de dicha primera (B-C) , dicha segunda (A-B) y dicha tercera (A-C) distancia, con el fin de mover la cesta (4) en una o más direcciones transversales de forma transversal con respecto a dicha dirección de desplazamiento (WA) para alinear el eje longitudinal de la cesta (4) con el eje longitudinal de dicha sonda (6) ;
- determinar una situación de peligro y generar una primera señal de alarma (AL2) , que indica que dicha aeronave de toma (5) está acercándose peligrosamente a dicha aeronave cisterna (2) , cuando dicha tercera distancia (AC) se encuentra por debajo de un primer umbral predeterminado.
2. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según la reivindicación 1, en el que dicho sistema de control de vuelo electrónico (7) comprende unos medios de control automático electrónico (21) instalados en la aeronave de toma (5) y diseñados para pilotar de manera automática dicha aeronave de toma (5) como una función de dicha primera (B-C) , dicha segunda (A-B) y dicha tercera (A-C) distancia, para alinear dicha sonda (6) con dicha cesta (4) .
3. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según las reivindicaciones 1 o 2, en el que dicho sistema de control de vuelo electrónico (7) comprende al menos una interfaz de usuario (25) instalada en dicha aeronave cisterna (2) y / o dicha aeronave de toma (5) ; estando diseñada dicha interfaz de usuario (25) para proporcionar al usuario la posición instantánea (PA) de dicha aeronave cisterna (2) , y / o la posición instantánea (P1) de dicha cesta (4) , y / o la posición instantánea (P2) de dicha aeronave de toma (5) como una función de dicha primera (B-C) , dicha segunda (A-B) y dicha tercera (A-C) distancia.
4. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según las reivindicaciones 2 y 3, en el que dichos medios de control electrónico (15) están configurados para cooperar con dichos medios de control automático electrónico (21) para mover dicha aeronave de toma (5) a una distancia más grande que, o igual a, una distancia de seguridad predeterminada con respecto a dicha aeronave cisterna (2) como una función de dicha primera señal de alarma (AL2) .
5. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según la reivindicación 4, en el que, al recibir dicha primera señal de alarma (AL2) , cada una de dichas interfaces de usuario (25) está configurada para enviar al piloto un mensaje de alarma que indica que dicha aeronave de toma (5) está acercándose peligrosamente a dicha aeronave cisterna (2) .
6. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según cualquiera de las reivindicaciones previas, en el que dicho sistema de control de vuelo electrónico (7) está configurado para generar una segunda señal de alarma (AL1) , que indica que dicha cesta (4) está acercándose peligrosamente a dicha aeronave cisterna (2) , cuando dicha segunda distancia (A-B) se encuentra por debajo de un segundo umbral predeterminado.
7. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según las reivindicaciones 2 y 6, en el que dichos medios de control electrónico (15) están configurados para cooperar con dichos medios de control automático electrónico (21) para mover dicha cesta (4) de manera automática en dichas direcciones transversales, por medio de dichos medios de control (18, 19) , a una distancia más grande que, o igual a, una distancia de seguridad predeterminada con respecto a dicha aeronave cisterna (2) como una función de dicha segunda señal de alarma (AL1) .
8. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según las reivindicaciones 3 y 7, en el que dichas interfaces de usuario (25) están configuradas para recibir dicha segunda señal de alarma (AL1) y suministrar al piloto un mensaje de alarma que indica que dicha cesta (4) está acercándose peligrosamente a dicha aeronave cisterna (2) .
9. Un sistema de reaprovisionamiento de combustible en vuelo asistido (1) según una cualquiera de las reivindicaciones previas 2 a 8, en el que dicho sistema de control de vuelo electrónico (7) está configurado para:
- calcular el movimiento o movimientos, y la velocidad, necesarios de la aeronave de toma (5) para mover esta hasta una posición de atraque, como una función de la tercera distancia (AC) , la velocidad (VA) de dicha aeronave cisterna
(2) y la velocidad (V2) de dicha aeronave de toma (5) que se miden por un módulo maestro (9) y un módulo esclavo
(11) de determinación de posición;
- pilotar dicha aeronave de toma (5) por medio de dichos medios de control automático electrónico (21) como una función de dicho movimiento o movimientos, y dicha velocidad, determinados;
- procesar la información de velocidad, distancia y rumbo suministrada de manera continua por unos módulos de determinación de posición por satélite diferencial (9) (10) (11) , para generar una señal de control (SCOM) que contiene una información en relación con el movimiento vertical / horizontal necesario de la cesta (4) y una información en relación con el movimiento vertical / horizontal necesario de dicha aeronave de toma (5) para conseguir el acoplamiento de cesta-sonda;
- controlar el movimiento de dicha cesta (4) , o los movimientos de dicha aeronave de toma (5) por medio de unos medios de control automático electrónico (21) , como una función de los movimientos que están contenidos en la señal de control (SCOM) ;
- determinar, como una función de la primera distancia (BC) si dicha cesta (4) y dicha sonda (6) están alineadas;
- una vez que dicha cesta (4) y dicha sonda (6) están alineadas, determinar los ajustes necesarios a la velocidad (V2) de la aeronave de toma (5) para conseguir un acoplamiento de cesta-sonda como una función de la velocidad (VA) de la aeronave cisterna (2) , la velocidad (V1) de la cesta (4) , la velocidad (V2) de la aeronave de toma (5) , y dicha primera distancia (B-C) .
10. Un sistema de reaprovisionamiento de combustible en vuelo asistido según la reivindicación 9, en el que dicho sistema de control de vuelo electrónico (7) está configurado para transmitir una señal (SCA) que contiene unas instrucciones para ajustar la velocidad (V2) de la aeronave de toma (5) a los medios de control automático electrónico (21) que procede a mover la aeronave de toma (5) hacia delante de manera completamente automática, haciendo los ajustes de velocidad que están contenidos en dicha señal (SCA) .
Patentes similares o relacionadas:
Método y sistema de acoplamiento de aeronave, del 10 de Julio de 2019, de BAE SYSTEMS PLC: Un método para acoplar físicamente una primera aeronave y una segunda aeronave, la primera aeronave es una aeronave en vuelo, la segunda aeronave es una […]
Punta con detección de carga de boquilla y funcionalidad de comunicación inalámbrica para brazo extensible de repostaje, del 19 de Junio de 2019, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un sistema de comunicación inalámbrica y de detección (WSCC) operativo junto con una aeronave repostada y una aeronave de repostaje, comprendiendo el sistema: una unidad […]
Sistema de control de un brazo de repostaje, del 27 de Marzo de 2019, de THE BOEING COMPANY: Un aparato para mover un brazo de repostaje en un avion cisterna , que comprende: un dispositivo de control que esta configurado para producir una […]
Sistema de detección de estado de conexión de un tubo para el trasvase de combustible, del 22 de Marzo de 2019, de Airbus Defence and Space SA: Boquilla para un tubo telescópico empleado en el reabastecimiento y trasvase de combustible en vuelo en un avión cisterna, dicha boquilla comprendiendo […]
 Dispositivo tensor para elevador de pluma de repostaje de aeronave, del 22 de Octubre de 2018, de MOOG INC.: Un aparato para aplicar tensión a un cable , cuando está conectado a una pluma de repostaje de aeronave, comprendiendo el aparato:
un árbol […]
Dispositivo tensor para elevador de pluma de repostaje de aeronave, del 22 de Octubre de 2018, de MOOG INC.: Un aparato para aplicar tensión a un cable , cuando está conectado a una pluma de repostaje de aeronave, comprendiendo el aparato:
un árbol […]
Sistema de reabastecimiento de combustible en vuelo de aeronaves, del 17 de Octubre de 2018, de Airbus Operations Limited: Un sistema de reabastecimiento de combustible en vuelo de aeronaves que incluye una pluralidad de tanques de combustible , conectados de manera […]
Método y sistema de indicación para reabastecimiento en vuelo, del 13 de Septiembre de 2018, de Airbus Defence and Space SA: Sistema de indicación para el reabastecimiento en vuelo que comprende: - una pantalla adaptada para ser transportada por una aeronave cisterna […]
Sistema doble 3D para obtener una imagen aumentada del sector de interés de la escena de trabajo en las operaciones de control basadas en imágenes 3D, del 8 de Febrero de 2018, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: 1. Sistema doble 3D para obtener una imagen aumentada del sector de interés de la escena de trabajo en operaciones de control basadas en imágenes […]