Sistema de control de la trayectoria de un proyectil.
Un proyectil estabilizado a rotación, que comprende:
un cuerpo (44) de proyectil,
inducido a rotar en un primer sentido alrededor de un eje longitudinal del proyectil; un paquete o módulo de guiado (41); y
una sección de control (30), conectada o unida de modo rotativo con el cuerpo de proyectil para su rotación con 5 respecto al cuerpo de proyectil alrededor del eje longitudinal del cuerpo de proyectil, de tal manera que la sección de control comprende:
una primera superficie aerodinámica (42), que se extiende desde un exterior de la sección de control para aplicar par a la sección de control alrededor del eje longitudinal del proyectil, en un sentido opuesto al sentido de rotación del cuerpo de proyectil;
un freno de balanceo disipativo (62), que actúa entre el cuerpo de proyectil y la sección de control;
de tal manera que el freno se aplica entre la sección de control y el cuerpo de proyectil de modo que el par aplicado por el freno equilibra o contrarresta el par aplicado por la primera superficie aerodinámica con el fin de controlar la rotación de la sección de control con respecto a un marco o sistema de referencia; caracterizado por que el freno es un freno de rozamiento accionado magnéticamente o un freno proporcional de fluido magneto-reológico.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2006/034980.
Solicitante: GENERAL DYNAMICS ORDNANCE AND TACTICAL SYSTEMS.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 11399 16TH COURT NORTH, SUITE 200 ST. PETERSBURG FL 33716 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MORRIS,JOSEPH P, SMITH,DOUGLAS L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F42B10/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 10/00 Medios para variar, p. ej. para mejorar, las propiedades aerodinámicas de los proyectiles; Disposiciones instaladas en los proyectiles para la estabilización, el pilotaje, el frenado de la caída, la reducción o el aumento del alcance (F42B 6/00 tiene prioridad; proyectiles subcalibrados provistos de calzos F42B 14/00). › utilizando aletas fijas (F42B 10/22 tiene prioridad).
- F42B10/26 F42B 10/00 […] › por rotación (F42B 10/04, F42B 10/12, F42B 10/14, F42B 10/24, F42B 14/02 tienen prioridad).
- F42B10/54 F42B 10/00 […] › Medios para frenar la rotación de un proyectil.
- F42B10/64 F42B 10/00 […] › de aletas de pilotaje.
PDF original: ES-2398968_T3.pdf
Fragmento de la descripción:
Sistema de control de la trayectoria de un proyectil.
Campo de la invención El campo se refiere al control de la trayectoria de proyectiles para un proyectil o cohete que tiene un sistema de guiado.
Antecedentes Se conoce la estabilización de un proyectil haciendo rotar el proyectil a lo largo de un eje longitudinal mientras está en vuelo. Se conoce también la práctica de dotar un proyectil de un sistema de control capaz de dirigir la trayectoria del proyectil en algún grado durante el vuelo del proyectil. Un experto de la técnica constatará que el sistema de control podría hacerse más simple y/o más efectivo si el sistema de control pudiera revertirse en su rotación con respecto al cuerpo del proyectil. De acuerdo con ello, se conoce la práctica de revertir la rotación de un sistema de control de proyectil utilizando un motor eléctrico.
Las Patentes de los EE.UU. Nos. 4.565.340, de Bains, y 6.981.672, de Clancy et al., describen proyectiles con sistemas de guiado que utilizan un motor o generador eléctrico para revertir la rotación del sistema de guiado. Las Patentes de los EE.UU. Nos. 5.379.968 y 5.425.514, de Grosso, preconizan un proyectil en el que un sistema de control accionado por un cohete es revertido en su rotación por medio de un motor eléctrico.
Se conocen también otros métodos de control de un proyectil en rotación. Por ejemplo, la Patente de los EE.UU. Nº 5.647.558, de Linick, divulga un sistema para guiar un proyectil en rotación utilizando un motor de impulso con toberas repartidas radialmente, y la Patente de los EE.UU. Nº 6.135.387, de Seidel et al., describe un proyectil que es estabilizado en su rotación durante una primera parte de su vuelo y es entonces ralentizado y estabilizado mediante aletas durante una segunda parte de su vuelo.
Ninguna de estas referencias tiene sistemas capaces de revertir la rotación de un paquete o módulo de guiado sin el uso de un motor eléctrico.
El documento US 2005/0056723 A1 divulga un proyectil de acuerdo con el preámbulo de la reivindicación 1, así como un método de acuerdo con el preámbulo de la reivindicación 9.
El documento US 5.393.012 divulga un misil que tiene una primera porción rotativa que porta superficies de control y una porción de cuerpo principal rotativa que porta un embrague accionado por bobina o solenoide para frenar la rotación de la primera porción con respecto a la segunda.
El documento US 2002/0195522 A1 divulga un aeroplano que tiene una parte frontal rotativa que porta aletas en virtud de las cuales un freno de rozamiento accionado hidráulicamente controla el ángulo de balanceo de la parte frontal o delantera con respecto al aeroplano.
Sumario de la invención Un proyectil de acuerdo con la invención se define por la reivindicación 1 y un método de acuerdo con la invención se define por la reivindicación 9.
Una ventaja de utilizar un sistema de frenado disipativo es el peso reducido y el consumo de energía muy bajo para la reversión de la rotación de la sección de guiado, en comparación con el uso de un motor / generador eléctrico, el cual requiere una armadura, arrollamientos, imanes, etc. Otra ventaja es que las superficies aerodinámicas asimétricas que se utilizan para las superficies de control no requieren dispositivos de accionamiento de control con el fin de modificar la dirección del proyectil. Otra ventaja es que un sistema de control que utiliza superficies aerodinámicas fijas, tales como bordas, y un sistema de frenado, es capaz de hacer rotar las superficies de control de la trayectoria a una velocidad de rotación predeterminada que puede ser menor o mayor que la velocidad de rotación del cuerpo de un sistema armamentístico. A la velocidad de rotación predeterminada, las aletas no alteran sustancialmente la dirección del proyectil; sin embargo, el sistema de control puede ser revertido rápidamente en su rotación con respecto a la velocidad de rotación predeterminada para el propósito de la corrección del curso. Un equilibrio entre el sistema de frenado disipativo y el par proporcionado por las bordas es capaz de mantener una velocidad de rotación de las superficies de control de manera que sea sustancialmente menor que la velocidad de rotación del proyectil estabilizado en su rotación, con lo que se reduce la energía y el tiempo necesarios para revertir la rotación de las superficies de control para el propósito de la corrección del curso. Aún otra ventaja es la capacidad para mantener toda la electrónica de control dentro del propio sistema armamentístico, al tiempo que la velocidad de rotación de un sistema de control de trayectoria en contrarrotación se determina utilizando tecnología de detección existente y futura que sea capaz de determinar la velocidad de rotación y la orientación relativas entre las superficies de control y el sistema armamentístico. En un ejemplo, esto permite el control de la trayectoria de un sistema armamentístico que no rota, y el sistema armamentístico que no rota puede incluir dos tramos o secciones de contrarrotación que equilibran los pares de frenado y de reversión de la rotación del sistema de control de la trayectoria.
Ha de comprenderse que tanto la descripción general anterior como la siguiente descripción detallada se proporcionan tan solo como ejemplo y a título explicativo, y no son restrictivas de la invención según se reivindica.
Breve descripción de los dibujos Los dibujos que se acompañan, los cuales se han incorporado a esta memoria y constituyen una parte de la misma, ilustran realizaciones de la invención y, junto con la descripción, sirven para explicar los principios de la invención. La invención no se limita a los ejemplos y realizaciones ilustrados por los dibujos.
La Figura 1 ilustra una realización del sistema de control de la trayectoria de un proyectil.
La Figura 2 ilustra una realización adicional de la invención, tal y como se utiliza conjuntamente con una bala de mortero.
La Figura 3 ilustra aún otra realización de la invención, tal y como se utiliza en combinación con un cohete.
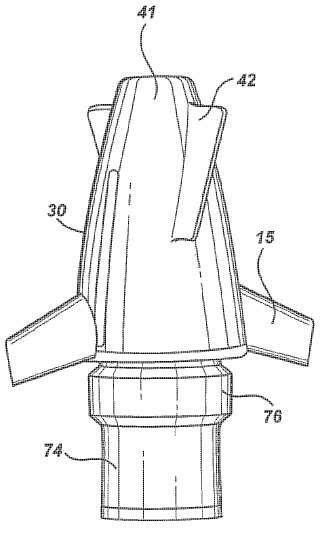
La Figura 4 ilustra el sistema de control de la Figura 1, montado en un proyectil.
La Figura 5 ilustra una realización del sistema de control, que tiene aletas y superficies aerodinámicas fijadas externamente en el paquete o módulo de guiado.
La Figura 6 ilustra una realización del sistema de control, que muestra medios de control y estructuras internas del paquete de guiado.
Las Figuras 7A y 7B ilustran otra realización del sistema de control de la trayectoria de un proyectil, en una configuración de collar, con el guiado y la alimentación de energía externos a la sección de control.
Las Figuras 8A y 8B ilustran una realización adicional de un sistema de control de trayectoria con una configuración de collar doble, con el guiado y la alimentación de energía externos a la sección de control.
Descripción detallada de realizaciones preferidas de la invención La siguiente descripción está destinada a aportar una comprensión exhaustiva de la invención al proporcionar un cierto número de realizaciones y detalles específicos que implican un sistema de control de la trayectoria de un proyectil. Se comprende, sin embargo, que la invención no está limitada por estas realizaciones y detalles específicos, que se proporcionan únicamente a título de ejemplo. Se comprende, de manera adicional, que una persona que posea conocimientos ordinarios de la técnica, a la luz de sistemas y métodos conocidos, apreciará el uso de la invención para sus propósitos y beneficios a que está destinada, en cualquier número de realizaciones alternativas.
A lo largo de toda esta memoria, se utiliza la expresión “sistema de referencia” en asociación con realizaciones de la invención. “Marco de referencia” se refiere a cualquier sistema de coordenadas o marco de referencia apropiado con respecto al cual puede medirse el movimiento o la rotación de un proyectil. Por ejemplo, el sistema de referencia puede ser un marco o sistema inercial fijo a la Tierra, aunque es posible utilizar cualquier sistema de referencia conocido.
Realizaciones de la presente invención incluyen un aparato y un método para controlar la trayectoria de un proyectil. Haciendo referencia a las Figuras 2-4 como ejemplos, el proyectil incluye un cuerpo 44 de proyectil y un sistema de control. El sistema de control incluye un tramo o sección de control 30, desacoplada a rotación con respecto al cuerpo 44 de proyectil alrededor de un eje de balanceo, y un paquete o módulo de guiado 41. La sección de control 30 incluye medios de control, tales como superficies aerodinámicas 15. El módulo de guiado... [Seguir leyendo]
Reivindicaciones:
1. Un proyectil estabilizado a rotación, que comprende:
un cuerpo (44) de proyectil, inducido a rotar en un primer sentido alrededor de un eje longitudinal del proyectil;
un paquete o módulo de guiado (41) ; y
una sección de control (30) , conectada o unida de modo rotativo con el cuerpo de proyectil para su rotación con respecto al cuerpo de proyectil alrededor del eje longitudinal del cuerpo de proyectil, de tal manera que la sección de control comprende:
una primera superficie aerodinámica (42) , que se extiende desde un exterior de la sección de control para aplicar par a la sección de control alrededor del eje longitudinal del proyectil, en un sentido opuesto al sentido de rotación del cuerpo de proyectil;
un freno de balanceo disipativo (62) , que actúa entre el cuerpo de proyectil y la sección de control;
de tal manera que el freno se aplica entre la sección de control y el cuerpo de proyectil de modo que el par aplicado por el freno equilibra o contrarresta el par aplicado por la primera superficie aerodinámica con el fin de controlar la rotación de la sección de control con respecto a un marco o sistema de referencia; caracterizado por que
el freno es un freno de rozamiento accionado magnéticamente o un freno proporcional de fluido magnetoreológico.
2. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, de tal manera que la sección de control comprende, adicionalmente, una segunda superficie aerodinámica (15) , capaz de producir sustentación en una dirección transversal al eje longitudinal del proyectil.
3. El proyectil estabilizado a rotación de acuerdo con la reivindicación 2, en el cual la segunda superficie aerodinámica produce sustentación únicamente cuando la rotación de la sección de control con respecto al sistema de referencia es de aproximadamente 0 (cero) Hz.
4. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, en el cual el cuerpo de proyectil tiene una gran inercia rotacional con respecto a la sección de control.
5. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, en el cual el paquete o módulo de guiado comprende al menos un sistema seleccionado de entre el grupo consistente en: un sistema basado en el Sistema de Localización Global, un sistema de navegación inercial, un láser semiactivo y un sistema de guiado por radiofrecuencia.
6. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, en el cual al menos una porción del módulo de guiado está colocada dentro de la sección de control.
7. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, en el cual al menos una porción del módulo de guiado está colocada dentro del cuerpo de proyectil, fuera de la sección de control.
8. El proyectil estabilizado a rotación de acuerdo con la reivindicación 1, que comprende adicionalmente un elemento de espoleta, de tal manera que la sección de control está colocada entre el elemento de espoleta y el cuerpo del proyectil.
9. Un método para controlar la trayectoria de un proyectil durante el vuelo, de tal manera que el proyectil tiene un cuerpo de proyectil con un eje longitudinal y una sección de control susceptible de hacerse rotar con respecto al cuerpo del proyectil, de modo que el método comprende:
lanzar el proyectil;
hacer rotar la sección de control con respecto al cuerpo del proyectil mediante la aplicación de un par a la sección de control para hacer rotar la sección de control alrededor del eje longitudinal del proyectil sin el uso de un motor eléctrico;
aplicar un freno entre la sección de control y el cuerpo del proyectil con el fin de ralentizar la rotación de la sección de control hasta 0 (cero) Hz con respecto a un marco o sistema de referencia;
orientar la sección de control con respecto al sistema de referencia; y
aplicar una fuerza lateral a la sección de control con el fin de alterar la trayectoria del proyectil, caracterizado por que el freno es un freno de rozamiento accionado magnéticamente o un freno proporcional de fluido magnetoreológico.
10. El método de acuerdo con la reivindicación 9, en el cual el proyectil comprende un paquete o módulo de guiado y el método comprende, de manera adicional, orientar la sección de control con respecto al sistema de referencia en respuesta a información proporcionada por el módulo de guiado.
11. El método de acuerdo con la reivindicación 10, que comprende adicionalmente reorientar la sección de control con respecto al sistema de referencia en respuesta a información adicional proporcionada por el módulo de guiado.
12. El método de acuerdo con la reivindicación 10, que comprende adicionalmente volver a hacer rotar la sección de control con respecto al sistema de referencia, al reducir la fuerza de frenado entre la sección de control y el cuerpo del proyectil.
13. El método de acuerdo con la reivindicación 10, en el cual aplicar un par a la sección de control para hacer rotar la sección de control alrededor del eje longitudinal del proyectil sin el uso de un motor eléctrico, comprende:
proporcionar una primera superficie aerodinámica que se extiende desde un exterior de la sección de control, a fin de aplicar par a la sección de control alrededor del eje longitudinal del proyectil.
14. El método de acuerdo con la reivindicación 13, en el cual orientar la sección de control con respecto al sistema 15 de referencia comprende:
equilibrar o contrarrestar el par de freno con el par proporcionado por la primera superficie aerodinámica, a fin de colocar la sección de control en un ángulo de rotación apropiado con respecto al sistema de referencia.
15. El método de acuerdo con la reivindicación 14, en el cual aplicar una fuerza lateral a la sección de control comprende proporcionar una segunda superficie aerodinámica en la sección de control, capaz de producir 20 sustentación en una dirección transversal al eje longitudinal del proyectil.
Patentes similares o relacionadas:
Dispositivo de frenado en rotación de una envuelta de una carga útil, y proyectil giroestabilizado equipado con tal dispositivo, del 23 de Abril de 2019, de NEXTER MUNITIONS: Dispositivo de frenado en rotacion de una envuelta cilindrica de una carga util eyectada a partir de un proyectil giroestabilizado, dispositivo […]
Proyectil que puede guiarse estabilizado rotacionalmente y método para guiar el mismo, del 15 de Noviembre de 2017, de BAE SYSTEMS BOFORS AB: Proyectil estabilizado rotacionalmente para su lanzamiento desde un cañón, que tiene una capacidad de planeo y una capacidad de guiado mejoradas durante […]
PROYECTIL DE ALCANCE LIMITADO., del 16 de Octubre de 2005, de PRIMEX TECHNOLOGIES, INC.: Un proyectil estabilizado por giro que comprende: - una parte de morro ojival ; - una parte posterior ; y - una parte media dispuesta entre […]
Ala plegable de dos partes para colas de misiles, del 8 de Enero de 2020, de MBDA Deutschland GmbH: Ala plegable para una cola de misil , que comprende: una primera parte de ala con un borde delantero de ala y un primer borde de junta […]
Sistema de guiado de proyectil terrestre, del 17 de Abril de 2019, de Leigh Aerosystems Corporation: Un sistema de unidad de guiado para un proyectil lanzado desde el suelo, que comprende: un proyectil lanzado desde el suelo que tiene un eje longitudinal […]
Sistema de bloqueo y desbloqueo con opción de liberación reversible para su uso ventajoso en sistemas de accionamiento (actuadores), del 3 de Abril de 2019, de MBDA Deutschland GmbH: Sistema de bloqueo y desbloqueo con liberación reversible, con - al menos un elemento de bloqueo / desbloqueo que se puede mover entre una posición de bloqueo y una […]
Dispositivo de guía de bajo coste para proyectil y método de operación, del 12 de Febrero de 2019, de BAE Systems Rokar International Ltd: Un montaje de guía adaptado para ser conectado a un proyectil que comprende: una unidad principal trasera adaptada para ser conectada por […]
Sistema de timón de misil, del 6 de Junio de 2018, de Diehl Defence GmbH & Co. KG: Sistema de timón de misil con una carcasa de timón , un árbol de timón alojado giratorio en la carcasa de timón , una pala de timón fijada […]