Robot de dirección.
Un robot de dirección para girar el volante de un vehículo (1) mediante control robótico,
comprendiendo el robot:
• un volante (2) para control manual del vehículo y
• medios (12) para sujetar dicho volante del robot al volante del vehículo en una pluralidad de puntos alrededor delos mismos para trasladar la rotación del volante del robot al volante del vehículo,
caracterizado porque el robot incluye además un motor abierto en el centro (6) que tiene un rotor anular (5) sujetocon el volante del robot y un estator anular (7), adaptado para anclarlo a fin de evitar su rotación, para accionamientodel volante mediante control robótico;
porque el volante del robot (2) está abierto en el centro y
porque los medios de sujeción (12) están abiertos (14) en el centro del volante del robot y de la pluralidad de puntosde sujeción.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2010/001203.
Solicitante: Anthony Best Dynamics Limited.
Nacionalidad solicitante: Reino Unido.
Dirección: Holt Road Bradford on Avon, Wiltshire BA15 1AJ REINO UNIDO.
Inventor/es: BEST, ANTHONY, NEADS, STEPHEN JOHN, HUBBARD,MATTHEW JAMES.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D1/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › Mando de la dirección, es decir, medios para producir un cambio en la dirección del vehículo.
PDF original: ES-2441246_T3.pdf
Descripción:
Robot de dirección.
La presente invención se refiere a un robot de dirección y, en particular, a un robot de dirección para girar el volante de un vehículo mediante control robótico Nuestro robot de dirección conocido comprende:
• un refuerzo de columna de dirección, adaptado para fijarlo a una columna de dirección;
• un rotor de un motor para dirección robótica, estando sujeto el rotor con el refuerzo de columna para girar la columna;
• un volante manual sujeto con el rotor y
• un estator respecto al que el rotor está montado, de manera que puede rotar, para girar el rotor para dirección 15 robótica.
El inconveniente de este robot es que su instalación en un vehículo es lenta e incómoda. No sólo se debe extraer el volante existente, sino que también se deben desconectar los controles montados en el volante. En algunas instalaciones, en las que no hay instalado un airbag de volante, se ha intentando salvar estas dificultades proporcionando un adaptador que se sujeta en el aro del volante y al que se puede acoplar el robot de dirección.
Cuando el volante original tiene instalado un airbag su extracción se debe realizar con especial cuidado. Además, el conductor deberá probar el coche sin el airbag. Asimismo, la extracción del airbag de algunos coches puede hacer que el sistema de control electrónico del coche limite el funcionamiento del coche.
Bajo ningún concepto se puede instalar nuestro robot de dirección conocido en un volante equipado con airbag con el adaptador anterior para volantes sin airbag. Es peligroso, ya que se corre el riesgo de que el airbag empuje todo el motor hacia el conductor.
El documento EP1617199, a nombre de Kurt Staehle, enseña un robot de dirección para girar un volante de un vehículo mediante control robótico que incluye un elemento en el robot que se puede conectar al volante del vehículo para trasladar la rotación al volante del vehículo, para dirigir el vehículo. No obstante, dicho robot de dirección no se puede instalar en vehículos provistos de un airbag de volante, ya que es probable que la activación del airbag afecte negativamente a la conexión por fricción entre el robot y el volante y, por lo tanto, que empuje el
robot hacia el conductor.
El objetivo de la presente invención es proporcionar un robot de dirección mejorado.
Según la invención se proporciona un robot de dirección para girar el volante de un vehículo mediante control 40 robótico, comprendiendo el robot:
• un volante para control manual del vehículo y
• medios para sujetar dicho volante del robot al volante del vehículo en una pluralidad de puntos alrededor de los mismos para trasladar la rotación del volante del robot al volante del vehículo,
caracterizado porque el robot incluye además un motor abierto en el centro que tiene un rotor anular sujeto con el volante del robot y un estator anular, adaptado para anclarlo a fin de evitar su rotación, para accionamiento del volante mediante control robótico; porque el volante del robot está abierto en el centro y porque los medios de sujeción están abiertos en el centro del volante del robot y de la pluralidad de puntos de 50 sujeción.
Preferentemente, los medios de sujeción incluyen:
• una pluralidad de accesorios de sujeción para sujetar el rotor al volante de un vehículo en dichos puntos;
• un anillo que interconecta los accesorios de sujeción, en los que los medio de sujeción están abiertos en el centro.
Como consecuencia de que los tres componentes principales del robot, y el robot propiamente dicho, estén abiertos en el centro se puede acceder sin problemas a los controles montados en el volante del vehículo y/o es posible el funcionamiento normal de un airbag montado en el volante del vehículo.
Preferentemente, la sujeción está provista de medios para ajustar la concentricidad del volante del robot con el volante del vehículo.
Normalmente, el robot incluirá un codificador anular para transmitir datos relativos al movimiento angular del rotor respecto al estator.
Además, por lo general, el robot de dirección estará provisto de medios para medir el par que ejerce el motor. 10 Convenientemente, están dispuestos, en forma de una respectiva célula de carga, en cada par de brazos que conecta el estator a un anclaje.
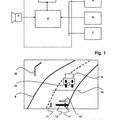
Para ayudar a entender la invención, a continuación se describirá una forma de realización específica de la misma a modo de ejemplo y haciendo referencia los dibujos adjuntos, en los que:
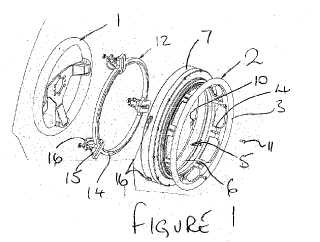
la Figura 1 es una vista en despiece ordenado de un robot de dirección de la invención; la Figura 2 es una vista en perspectiva del robot de dirección y la Figura 3 es una vista transversal a través de un motor de dirección del robot de dirección.
Haciendo referencia a los dibujos, un robot de dirección para acoplamiento al volante de un vehículo 1 tiene su 20 propio volante 2 que comprende, básicamente, un aro 3 y una serie de piezas separadoras espaciadas circunferencialmente 4. Éstas están acopladas a un rotor anular 5 de un motor anular 6. Éste tiene un estator anular
7. Un cojinete de rodillos anular 8 está dispuesto entre el estator y el rotor. Instalada en el lateral delantero (en uso) del rotor hay una placa de montaje anular 9 que tiene tres lengüetas 10 que se extienden ligeramente hacia dentro para recibir pernos de montaje 11.
Una sujeción 12 formada de un anillo 14 que tiene alrededor tres orejetas radiales con ranura espaciadas por igual
15. Las orejetas proporcionan acoplamientos para tres accesorios de sujeción 16 con los que la fijación se puede acoplar temporalmente al volante del vehículo 1. Dado que éste puede no tener un aro realmente circular, puede que el acoplamiento de la sujeción con la columna de dirección del vehículo en cuestión no sea concéntrico. El ajuste de la concentricidad se puede conseguir por medio de las lengüetas 10, de los pernos 11 y de las orejetas 15.
El estator tiene un par de orejetas de reacción de par 16 que pueden reaccionar al par de dirección que ejerce el motor para efectuar una maniobra de dirección durante las pruebas. Reaccionan mediante un par de varillas de reacción 17, que incluyen sensores de carga 18, por medio de un ensamblaje de reacción 19 adaptado para apoyarlo entre el suelo del vehículo y el parabrisas de un modo conocido. Un codificador anular 20 está dispuesto dentro del motor del que un controlador robótico (no se muestra) recibe los datos de ángulo del volante.
Se observará en la Figura 2, si bien la misma muestra un volante convencional 1, que el robot de dirección no oculta el volante. Esto se debe a la construcción abierta en el centro del robot de dirección, con lo que los controles 40 montados en el volante, tales como, control crucero y, en particular, un airbag montado en el volante, pueden funcionar / se pueden hacer funcionar de manera normal.
Reivindicaciones:
1. Un robot de dirección para girar el volante de un vehículo (1) mediante control robótico,
comprendiendo el robot: 5 • un volante (2) para control manual del vehículo y
• medios (12) para sujetar dicho volante del robot al volante del vehículo en una pluralidad de puntos alrededor de los mismos para trasladar la rotación del volante del robot al volante del vehículo, caracterizado porque el robot incluye además un motor abierto en el centro (6) que tiene un rotor anular (5) sujeto con el volante del robot y un estator anular (7) , adaptado para anclarlo a fin de evitar su rotación, para accionamiento del volante mediante control robótico; porque el volante del robot (2) está abierto en el centro y porque los medios de sujeción (12) están abiertos (14) en el centro del volante del robot y de la pluralidad de puntos de sujeción.
2. Un robot de dirección según la reivindicación 1, en el que los medios de sujeción (12) incluyen una pluralidad de accesorios de sujeción (16) para sujetar el rotor al volante de un vehículo en dichos puntos.
3. Un robot de dirección según la reivindicación 2, en el que los medios de sujeción (12) incluyen un anillo (14) que interconecta los accesorios de sujeción. 20
4. Un robot de dirección según la reivindicación 1, la reivindicación 2 o la reivindicación 3, en el que los medios de sujeción (12) están provistos de medios (10, 11, 15) para ajustar la concentricidad del volante del robot
(2) con el volante del vehículo (1) .
5. Un robot de dirección según cualquiera de las reivindicaciones precedentes, que incluye un cojinete de rodillos anular entre el rotor anular y el estator anular.
6. Un robot de dirección según cualquiera de las reivindicaciones precedentes, que incluye un codificador
anular (20) para transmitir datos relativos al movimiento angular del rotor respecto al estator. 30
7. Un robot de dirección según cualquiera de las reivindicaciones precedentes, que incluye medios (18) para medir el par que ejerce el motor.
8. Un robot de dirección según la reivindicación 7, en el que los medios de medición de par son una 35 célula de carga respectiva (18) en cada par de brazos que conecta el estator a un anclaje.
Patentes similares o relacionadas:
Dispositivo de señalamiento de la dirección del sol, del 24 de Abril de 2017, de UNIVERSIDAD DE EXTREMADURA: Dispositivo de señalamiento de la dirección del Sol, que comprende: Una primera pieza (1a) configurada para posicionarse sobre una superficie horizontal, donde […]
Máquina para cortar un material de espuma expandida, del 11 de Enero de 2017, de Fecken-Kirfel GmbH & Co. KG: Máquina para cortar material de espuma expandida con una cuchilla sinfín en forma de cinta que presenta un filo de cuchilla (11b) delantero afilado y un […]
Sistema de control de vehículo para controlar la dirección del vehículo, del 21 de Septiembre de 2016, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de control para controlar la dirección de un aparato de conducción, en el que el sistema está caracterizado por: un dispositivo de proyección […]
 Bloque de mando de columna de dirección de un vehículo que comprende una interfaz de ensamblaje por apriete para la fijación de una manivela de mando y manivela de mando asociada, del 16 de Marzo de 2016, de PEUGEOT CITROEN AUTOMOBILES SA: Bloque de mando de columna de dirección de un vehículo que comprende una interfaz de ensamblaje para la fijación de una manivela de mando al citado bloque, […]
Bloque de mando de columna de dirección de un vehículo que comprende una interfaz de ensamblaje por apriete para la fijación de una manivela de mando y manivela de mando asociada, del 16 de Marzo de 2016, de PEUGEOT CITROEN AUTOMOBILES SA: Bloque de mando de columna de dirección de un vehículo que comprende una interfaz de ensamblaje para la fijación de una manivela de mando al citado bloque, […]
 Vehículo de conducción bidireccional, del 25 de Junio de 2015, de PRIETO AGUSTI, Carlos: 1. Vehículo de conducción bidireccional, tal como un turismo, furgoneta o similar para uso militar o espacial, que dotado de un conjunto principal de medios de guiado […]
Vehículo de conducción bidireccional, del 25 de Junio de 2015, de PRIETO AGUSTI, Carlos: 1. Vehículo de conducción bidireccional, tal como un turismo, furgoneta o similar para uso militar o espacial, que dotado de un conjunto principal de medios de guiado […]
 Accionamiento y control universal de los mecanismos de dirección de vehículos móviles, del 20 de Agosto de 2014, de Exelis Inc. (100.0%): Un sistema de accionamiento y control para un mecanismo de dirección de un vehículo móvil, el sistema comprende:
un motor que incluye un eje de transmisión que es rotatorio […]
Accionamiento y control universal de los mecanismos de dirección de vehículos móviles, del 20 de Agosto de 2014, de Exelis Inc. (100.0%): Un sistema de accionamiento y control para un mecanismo de dirección de un vehículo móvil, el sistema comprende:
un motor que incluye un eje de transmisión que es rotatorio […]
USO DE DERIVADOS DE NITRILO COMO MEDICAMENTO., del 16 de Marzo de 2007, de FLOW HOLDINGS SAGL: Uso de un compuesto de fórmula (I): (Ver fórmula) en la que: A es un anillo de 6 miembros que contiene opcionalmente un doble enlace, y que contiene opcionalmente […]
 DISPOSITIVO DE VISION NOCTURNA, del 1 de Marzo de 2009, de ROBERT BOSCH GMBH: Dispositivo de visión nocturna para vehículos, con, al menos, una cámara de visión nocturna , una unidad de control y una unidad indicadora […]
DISPOSITIVO DE VISION NOCTURNA, del 1 de Marzo de 2009, de ROBERT BOSCH GMBH: Dispositivo de visión nocturna para vehículos, con, al menos, una cámara de visión nocturna , una unidad de control y una unidad indicadora […]