Método para optimizar mapas de calibrado para un algoritmo de estimación de una cantidad de control de un motor de combustión interna.
Método para optimizar los mapas de calibrado (Mn) usados en un algoritmo para estimar una cantidad de controlde un motor de combustión interna (Pctr) indicativa del par de torsión del motor,
que comprende:
- medir la cantidad de control (Pctrm);
- estimar la cantidad de control (Pctrs); y
- optimizar cada mapa de calibrado (Mn) basándose en la cantidad de control medida (Pctrm) y la cantidad decontrol estimada (Pctrs);
en el que cada mapa de calibrado (Mn) comprende una pluralidad de valores de calibrado (Pclb) de la cantidad decontrol estimada (Pctrs) y
optimizar cada mapa de calibrado (Mn) comprende:
- optimizar al menos uno de dicha pluralidad de valores de calibrado (Pclb);
- distribuir dichos valores de calibrado optimizados (Pclb-ott) en dicho mapa de calibrado (Mn) basándose en uncriterio preestablecido:
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07425782.
Solicitante: FIAT GROUP AUTOMOBILES S.P.A.
Nacionalidad solicitante: Italia.
Dirección: CORSO GIOVANNI AGNELLI, 200 10135 TORINO (TO) ITALIA.
Inventor/es: RIEGEL,ALESSANDRO, SACCO,DARIO, GAROFALO FABIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F02D41/24 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F02 MOTORES DE COMBUSTION; PLANTAS MOTRICES DE GASES CALIENTES O DE PRODUCTOS DE COMBUSTION. › F02D CONTROL DE LOS MOTORES DE COMBUSTION (accesorios para el control automático de la velocidad en vehículos, que actúan sobre una sola subunidad del vehículo B60K 31/00; control conjunto de subunidades del vehículo de diferente tipo o diferente función, sistemas de control de la propulsión de vehículos de carretera para propósitos distintos que el control de una sola subunidad B60W; válvulas de funcionamiento cíclico para los motores de combustión F01L; control de la lubrificación de los motores de combustión F01M; refrigeración de los motores de combustión interna F01P; alimentación de los motores de combustión con mezclas combustibles o constituyentes de las mismas, p. ej. carburadores, bombas de inyección, F02M; arranque de los motores de combustión F02N; control del encendido F02P; control de las plantas motrices de turbinas de gas, de las plantas motrices por propulsión a reacción o de las plantas motrices de productos de la combustión, ver las clases relativas a estas plantas). › F02D 41/00 Control eléctrico de la alimentación de mezcla combustible o de sus constituyentes (F02D 43/00 tiene prioridad). › caracterizado por la utilización de medios digitales.
PDF original: ES-2423949_T3.pdf
Fragmento de la descripción:
Método para optimizar mapas de calibrado para un algoritmo de estimación de una cantidad de control de un motor de combustión interna La presente invención se refiere a un método para optimizar mapas de calibrado para un algoritmo de estimación de una cantidad de control de un motor de combustión interna.
Como se sabe, las unidades de control de un motor de vehículo electrónico moderno implementan una pluralidad de algoritmos que, cuando el motor está en funcionamiento, estiman las cantidades del motor basándose en que la unidad de control electrónica controla el funcionamiento del motor.
Estos algoritmos generalmente funcionan usando cantidades de entrada, del tipo de motor por ejemplo, medidas generalmente por sensores cuando el motor está en funcionamiento, y determinan experimentalmente mapas de calibrado que describen la tendencia de la cantidad estimada por el algoritmo, como una función de las cantidades de las que depende.
Como norma, antes de almacenarlos en la unidad de control electrónica, los algoritmos se calibran usando los mapas mencionados anteriormente.
Por ejemplo, el algoritmo para estimar el par de torsión instantáneo suministrado por el motor, normalmente usa el número de revoluciones del motor RPM y/o la posición del pedal acelerador como cantidades de entrada, ambas de estas detectadas por los sensores adecuados, y uno o más mapas de calibrado de algoritmo que describe la tendencia del par de torsión suministrado como una función del número de revoluciones del motor RPM y/o la posición del pedal acelerador, valores con los que el algoritmo calcula cada valor del par de torsión estimado.
En particular, los mapas de calibrado del algoritmo se definen midiendo experimentalmente, en un banco de pruebas del motor o por rodadura en carretera para vehículos, las cantidades de motor que serán estimadas por el algoritmo, como una función de las variables de las que este depende, por ejemplo el par de torsión suministrado por el motor puede medirse como una función del número de revoluciones RPM.
Realizando las mediciones de las cantidades especificadas en los mapas de calibrado y el calibrado de los algoritmos de la unidad de control son operaciones que requieren tiempos bastante largos, son particularmente onerosas y tienen una proporción significativa sobre los costes de desarrollo de las unidades de control de vehículo. Adicionalmente, la necesidad de implementar algoritmos cada vez más complejos en las unidades de control para realizar los cálculos en base a las cantidades suministradas por una pluralidad de mapas hace que el proceso de calibrar los algoritmos, que consiste en la definición de valores del mapa, sea aún más largo y complicado.
Para simplificar el procedimiento de calibrado de los algoritmos, se conoce por ejemplo lo siguiente: el uso de fórmulas de aproximación que describen la física del fenómeno a representar, el uso de lenguajes de programación específicos necesarios para poder usar fórmulas algebraicas mediante las cuales pueden calcularse los valores de parámetro óptimos o la descomposición de los algoritmos en algoritmos más sencillos y el calibrado de cada uno de ellos usando los datos adquiridos específicamente. Por ejemplo, si el par de torsión suministrado por el motor depende del producto de la salida de dos mapas de calibrado, normalmente se miden las cantidades físicas representativas de cada uno de los dos mapas y después cada mapa se calibra independientemente.
Sin embargo, estas soluciones tienen diversos inconvenientes incluyendo:
-la necesidad de realizar mediciones específicas para el calibrado del algoritmo,
-la necesidad de realizar las mediciones en condiciones ambientales y/o del motor especiales,
-el uso de sensores adicionales para la adquisición de todas las cantidades de entrada y salida de los mapas,
-la propagación de los errores de medición en el procedimiento de calibrado,
-la mala precisión de las fórmulas simplificadas utilizadas para describir el fenómeno físico,
-la imprecisión y dificultad de los lenguajes de programación específicos usadas para implementar el algoritmo.
El documento WO2005/103472 desvela un aparato de gestión de motor para un motor de combustión interna de un vehículo incluyendo un microprocesador que funciona sobre los mecanismos de ajuste del vehículo. El vehículo tiene
un sensor de par de torsión para detectar el par de torsión generado por el motor y los mecanismos de ajuste ajustan valores paramétricos relacionados con el par de torsión. El circuito de memoria es accesible por el microprocesador. El circuito de memoria almacena datos que representan al menos un conjunto de valores paramétricos y un intervalo de valores de par de torsión correspondiente a los valores paramétricos respectivos en el conjunto. Un conjunto de instrucciones son ejecutables por el microprocesador de manera que el microprocesador recupera cíclicamente un valor de par de torsión en tiempo real desde el sensor de par de torsión y actualiza la memoria si el valor de par de torsión recuperado es mayor que un valor de par de torsión almacenado correspondiente a un valor paramétrico actual. El microprocesador ajusta el valor paramétrico actual si el valor de par de torsión recuperado es menor que el valor de par de torsión almacenado.
De esta manera, hay una necesidad de reducir el número de mediciones experimentales necesarias para obtener los mapas al mínimo imprescindible y de implementar un método de optimización para los mapas de calibrado de los algoritmos que al menos supere parcialmente los inconvenientes de los métodos conocidos.
De acuerdo con la presente invención, se proporciona un método para optimizar mapas de calibrado para un algoritmo de estimación de una cantidad de control de un motor de combustión interna, como se define en las reivindicaciones adjuntas.
Para una mejor comprensión de la presente invención, se describirá ahora una realización preferida, meramente a modo de ejemplo no limitante y con referencia a los dibujos adjuntos, donde:
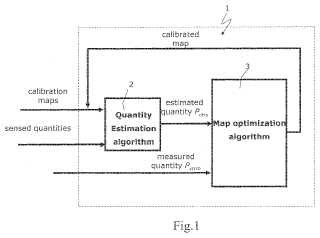
• La Figura 1 muestra un diagrama de bloques del principio del método de optimización del mapa de calibrado de la invención,
• La Figura 2 muestra un diagrama de flujo del método de optimización del método de optimización del mapa de calibrado de la invención,
• Las Figuras 3 y 5 muestran diagramas de flujo más detallados del método de optimización del mapa de calibrado de la invención, y
• La Figura 4 muestra un ejemplo de la estructura del mapa de calibrado obtenido de acuerdo con el método de la invención.
En la Figura 1, el número de referencia 1 indica, en su totalidad, una unidad electrónica de procesamiento de datos, por ejemplo un ordenador, configurado para implementar el método de optimización del mapa de calibrado de la invención.
A grandes rasgos, como se muestra en el diagrama de bloques del principio en la Figura 1, el método de la invención incluye:
• almacenar los mapas de calibrado de al menos un algoritmo de estimación 2 para una cantidad de control Pctr, del tipo de motor, tal como el par de torsión suministrado por el motor, por ejemplo, en la unidad de procesamiento 1,
• estimar la cantidad de control Pctr, mediante el algoritmo 2, en base a los mapas de calibrado y las cantidades de entrada detectadas por los sensores y de los cuales depende la cantidad de control Pctr a estimar,
• medir experimentalmente la cantidad de control Pctrm, e
• implementar un algoritmo de calibrado 3 para el algoritmo 2 mediante la optimización de los mapas de calibrado del algoritmo 2, tal como para hacer que la cantidad Pctrs estimada por el algoritmo 2 sea tan aproximada a la cantidad Pctrm medida como sea posible.
Por ejemplo, siempre con referencia a la Figura 1, el método de la invención puede usarse para calibrar el algoritmo de estimación para el par de torsión suministrado por el motor, implementado por la unidad de control electrónico para el control del motor mediante la optimización de los mapas de calibrado para el par de torsión estimado por dicho algoritmo, estando estos almacenados también en la unidad de control electrónica y siendo usados por el algoritmo para realizar la estimación del par de torsión.
En particular, como se muestra en el diagrama de flujo en la Figura 2, en una fase inicial del método, bloque 4, se adquieren los parámetros característicos de cada mapa de calibrado almacenado, más específicamente:
• los valores de las cantidades de entrada Pi del mapa y los valores de calibrado correspondientes Pclb asociados con... [Seguir leyendo]
Reivindicaciones:
1. Método para optimizar los mapas de calibrado (Mn) usados en un algoritmo para estimar una cantidad de control de un motor de combustión interna (Pctr) indicativa del par de torsión del motor, que comprende:
- medir la cantidad de control (Pctrm) ;
- estimar la cantidad de control (Pctrs) ; y - optimizar cada mapa de calibrado (Mn) basándose en la cantidad de control medida (Pctrm) y la cantidad de control estimada (Pctrs) ;
en el que cada mapa de calibrado (Mn) comprende una pluralidad de valores de calibrado (Pclb) de la cantidad de control estimada (Pctrs) y optimizar cada mapa de calibrado (Mn) comprende:
- optimizar al menos uno de dicha pluralidad de valores de calibrado (Pclb) ;
- distribuir dichos valores de calibrado optimizados (Pclb-ott) en dicho mapa de calibrado (Mn) basándose en un criterio preestablecido:
y en el que optimizar un valor de calibrado (Pclb) comprende:
- determinar la cantidad de control estimada (Pctrs) basándose en la cantidad de control medida (Pctrm) y el valor de calibrado (Pclb) ;
- calcular una primera desviación típica (SQM1) entre la cantidad de control medida (Pctrm) y la cantidad de control estimada (Pctrs) ;
- determinar un primer valor de calibrado corregido (Pclb+F) basándose en un factor de corrección (F) ;
- determinar la cantidad de control estimada (Pctrs) basándose en la cantidad de control medida (Pctrm) y el primer valor de calibrado corregido (Pclb+F) ;
- calcular una segunda desviación típica (SQM2) entre la cantidad de control medida (Pctrm) y la cantidad de control estimada (Pctrs) basándose en la cantidad de control medida (Pctrm) y el primer valor de calibrado corregido (Pclb+F) ;
- determinar un segundo valor de calibrado corregido (Pclb-F) basándose en el factor de corrección (F) ,
- determinar la cantidad de control estimada (Pctrs) basándose en la cantidad de control medida (Pctrm) y el segundo valor de calibrado corregido (Pclb-F) ;
- calcular una tercera desviación típica (SQM3) entre la cantidad de control medida (Pctrm) y la cantidad de control estimada (Pctrs) basándose en la cantidad de control medida (Pctrm) y el segundo valor de calibrado corregido (Pclb+F) ;
- comparar la primera (SQM1) , segunda (SQM2) y tercera (SQM3) desviaciones típicas entre sí y con un valor umbral preestablecido; y - optimizar el valor de calibrado (Pclb) basándose en dicha comparación;
estando dicho método caracterizado por que:
cuando la desviación típica más pequeña (SPQMmin) de dichas desviaciones típicas (SQM1, SQM2, SQM3) es mayor que un valor umbral preestablecido, optimizar dicho valor calibrado (Pclb) basándose en dicha comparación comprende:
- determinar un primer valor de calibrado mínimo (Pclb2) , que está definido como el punto más bajo de una función de tipo parabólico que pasa a través de dicha primera, segunda y tercera desviaciones típicas (SQM1, SQM2, SQM3) ;
- determinar un segundo valor de calibrado mínimo (Pclb3) , que está definido como el punto más bajo de una función de tipo parabólico que pasa a través de dicha primera (SQM1) segunda (SQM2) y tercera (SQM3) desviaciones típicas y dicho primer valor de calibrado (Pclb2) ;
- determinar un valor algebraico mínimo de una función que pasa a través de dicha primera (SQM1) , segunda (SQM2) y tercera (SQM3) desviaciones típicas y dicho primer (Pclb2) y segundo (Pclb3) valores mínimos, y que modela dicha desviación típica más pequeña (SQMmin) ; y
-sustituir dicho valor de calibrado (Pclb) en dicho mapa de calibrado (Mn) con un valor de calibrado óptimo (Pclb-ott) que está localizado en un punto intermedio entre dicho valor de calibrado (Pclb) y dicho valor algebraico
mínimo.
2. Método de acuerdo con la reivindicación 1, en el que el factor de calibrado (F) se determina basándose en un número entero (K) dentro del intervalo preestablecido de números enteros y una variación mínima preestablecida (De) del valor de calibrado (Pclb) .
3. Método de acuerdo con la reivindicación 2, en el que el factor de calibrado (F) se determina basándose en el producto de dicho número entero (K) dentro de un intervalo preestablecido de números enteros y dicha variación mínima preestablecida (De) de dicho valor de calibrado (Pclb) .
4. Método de acuerdo con una cualquiera de las reivindicaciones 1 a 3, en el que:
- dicho primer valor de calibrado corregido (Pclb+F) se determina sumando dicho factor (F) de corrección a dicho valor de calibrado (Pclb) , y
- dicho segundo valor de calibrado corregido (Pclb-F) se determina restando dicho factor de corrección (F) de dicho valor de calibrado (Pclb) .
5. Método de acuerdo con la reivindicación 4, en el que cuando dicha desviación típica más pequeña (SPQMmin) está por debajo de dicho valor umbral preestablecido, optimizar dicho valor de calibrado (Pclb) basándose en dicha comparación comprende:
- establecer en el mapa de calibrado (Mn) un valor de calibrado óptimo (Pclb-ott) elegido entre dicho valor de calibrado (Pclb) , dicho primer valor de calibrado corregido (Pclb+F) y dicho segundo valor de calibrado corregido (Pclb-F) y para el que la desviación típica (SQM) es más cercana a dicha desviación típica más pequeña (SQMmin) .
6. Método de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho valor algebraico mínimo se determina basándose en un algoritmo de "Levenberg Marquardt".
7. Método de acuerdo con cualquiera de las reivindicaciones anteriores, en el que distribuir dicha pluralidad de valores de calibrado optimizados (Pclb-ott) en dicho mapa (Mn) comprende:
- calcular un factor de extensión (STR) de acuerdo con la fórmula:
donde:
- X es un valor de una cantidad de entrada (Pi) de dicho mapa,
- Y es un valor de calibrado (Pclb) correspondiente a dicho valor X de dicha cantidad de entrada (Pi) , e
- i es un índice que asocia un valor X de la cantidad de entrada (Pi) con el valor de calibrado optimizado correspondiente (Pclb-ott) ,
- añadir una cantidad igual a η*STR/2 a cada valor de calibrado optimizado (Pclb-ott) ,
donde: η es un factor de extensión entre un valor mínimo de cero, correspondiente a que no hay extensión, y un valor máximo de 1, correspondiente a la extensión máxima, y
- restar una cantidad igual a η*STR/4 de los valores adyacentes (Pclb-1, Pclb+1) de dicho valor de calibrado optimizado (Pclb-ott) .
8. Producto de software que puede cargarse en una memoria de un procesador digital, comprendiendo dicho producto de software porciones de código de software capaces de implementar el método de acuerdo con cualquiera de las reivindicaciones 1 a 7, donde dicho producto de software se ejecuta en dicho procesador digital.
Patentes similares o relacionadas:
Procedimiento para determinar la composición del combustible utilizado para el funcionamiento de un motor de combustión interna, del 17 de Junio de 2020, de Vitesco Technologies GmbH: Procedimiento para determinar la composición del combustible utilizado para el funcionamiento normal de un motor de combustión interna, - en el que se miden oscilaciones […]
 Sistema para controlar un motor de combustión interna, del 30 de Octubre de 2019, de FPT Industrial S.p.A: Sistema de control de un motor (Eng) de combustión interna, comprendiendo el sistema de control:
- medios (STOP) de detención para detener automáticamente […]
Sistema para controlar un motor de combustión interna, del 30 de Octubre de 2019, de FPT Industrial S.p.A: Sistema de control de un motor (Eng) de combustión interna, comprendiendo el sistema de control:
- medios (STOP) de detención para detener automáticamente […]
Sistema y procedimiento de modificación remota del funcionamiento de un vehículo, del 16 de Octubre de 2019, de Deep Science, LLC: Un sistema para controlar las emisiones de vehículos en un área geográfica, comprendiendo el sistema un sistema de control de motor para un vehículo que tiene […]
Método y aparato para medir y controlar la tasa de EGR en un motor de combustión, del 16 de Octubre de 2019, de FPT Motorenforschung AG: Método para medir y controlar una tasa de EGR en un sistema de motor de combustión, el sistema comprende al menos un enfriador de EGR, una válvula de […]
Procedimiento para la recirculación de gas de escape, del 11 de Septiembre de 2019, de DEUTZ AKTIENGESELLSCHAFT: Procedimiento para la recirculación de gas de escape (AGR), en especial en motores de combustión, para la reducción de la emisión de NOx, controlándose […]
Dispositivo para controlar la relación aire/combustible de un motor de combustión interna de múltiples cilindros, del 7 de Agosto de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un sistema de control de la relación aire-combustible de un motor de combustión interna de múltiples cilindros provisto, como medio de control de la cantidad de aire de […]
Sistema de control de carburación para motores de vehículos aéreos no tripulados y motor para vehículo aéreo no tripulado, del 11 de Abril de 2019, de Alpha Unmanned Systems S.L: Sistema de control de carburación para motores de vehículos aéreos no tripulados y motor para vehículo aéreo no tripulado. Sistema de control […]
Unidad de motor, del 27 de Febrero de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Unidad de motor que comprende: un cuerpo principal de motor que forma al menos una cámara de combustión; un elemento de paso de admisión que conecta un orificio de […]