MÉTODO PARA MANIPULAR MUESTRAS MICROSCÓPICAS Y MEDIR LAS FUERZAS QUE ACTÚAN SOBRE ELLAS.
Método para manipular muestras microscópicas y medir las fuerzas que actúan sobre ellas.
Comprende polarizar un haz láser en una dirección que es substancialmente diferente a la dirección del índice de refracción extraordinario de un modulador espacial de luz difractivo que modula el haz láser polarizado para generar un patrón de trampas ópticas holográficas que permite manipular una pluralidad de muestras microscópicas; crear una trampa óptica, distinta del patrón de trampas holográficas, para una muestra microscópica distinta usando la componente del haz polarizado que es ortogonal a la dirección del índice de refracción extraordinario; separar por polarización la luz dispersada por el patrón de trampas holográficas y por la trampa óptica distinta; captar la imagen de la luz dispersada por la trampa óptica distinta con un detector; y medir las fuerzas ópticas que actúan sobre la muestra microscópica distinta a partir de las señales proporcionadas por el detector.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201130783.
Solicitante: UNIVERSITAT DE BARCELONA.
Nacionalidad solicitante: España.
Inventor/es: MONTES USATEGUI,MARIO, FARRÉ FLAQUER,ARNAU, MARTÍN BADOSA,Estela, MAS SOLER,Josep.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01L1/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 1/00 Medida de fuerzas o tensiones, en general (medida de la fuerza producida por un choque G01L 5/00). › por utilización de radiaciones (ondas o partículas), p. ej. rayos X, neutrones (G01L 1/24 tiene prioridad).
Fragmento de la descripción:
Método para manipular muestras microscópicas y medir las fuerzas que
actúan sobre ellas
La invención está relacionada con pinzas ópticas, y más concretamente con
5 un método para manipular muestras microscópicas y también para medir las
fuerzas que se ejercen sobre ellas, que comprende las etapas de generar un
haz láser y modular el haz láser mediante un modulador espacial difractivo,
con el fin de generar un patrón de trampas holográficas para manipular una
pluralidad de muestras microscópicas
10
ESTADO DE LA TÉCNICA
Las pinzas ópticas usan luz para manipular muestras microscópicas mediante
la creación de una trampa óptica para partículas pequeñas. La trampa óptica
15 se crea en un punto en el que un haz láser está altamente focal izado. La
presión de radiación es capaz de atrapar partículas dieléctricas porque el
perfil transversal del haz crece hacia su centro (la luz es más brillante en el
centro que en los bordes del haz) , por lo cual hay un fuerte gradiente del
campo eléctrico que atrae a las partículas dieléctricas al centro del haz y
2 o puede compensar la fuerza que actúa sobre las partículas en la dirección de
propagación de la luz (la llamada fuerza de dispersión, que puede actuar en
sentidos opuestos, dependiendo de si la luz es reflejada o refractada por la
partícula) . La fuerza de dispersión y la de gradiente son proporcionales a la
intensidad de la luz pero, como se ha comentado, la fuerza de gradiente
2 5 actúa en la dirección del gradiente de intensidad mientras la fuerza de
dispersión actúa en la dirección de la luz incidente.
El principio básico de las pinzas ópticas es la transferencia de momento
asociada con la luz que cambia de dirección. La luz lleva un momento que es
3 o proporcional a su energía y apunta en la dirección de propagación. Cualquier
cambio en la dirección de la luz, por reflexión o refracción, resulta en un
cambio del momento de la luz. Si un objeto desvía la luz, cambiando su
momento, la conservación del momento requiere que el objeto deba sufrir un
cambio de momento igual y opuesto. Esto da lugar a una fuerza actuando
3 5 sobre el objeto.
Con las pinzas ópticas, se pueden detectar y medir pequeños
desplazamientos de una partícula, lo que permite medir la fuerza ejercida
sobre la partícula. Los métodos estándar para medir fuerzas en trampas
ópticas convencionales únicas se basan en la relación lineal entre la fuerza
ejercida (F) y la posición de la muestra en la trampa (x) , F =-kx. En esta
5 aproximación armónica, que es válida para pequeños desplazamientos
respecto al centro, la trampa actúa como un muelle, con una constante
elástica k, denominada normalmente rigidez ("stiffness" en inglés) de la
trampa. Entre los diferentes métodos de detección precisa de la posición, la
interferometría en el plano focal ("BFP, back focal plane" en inglés) ha
1 o conseguido una gran aceptación porque proporciona tanto un ancho de
banda temporal grande como una alta resolución espacial, y es fácil de
implementar. La rigidez se determina analizando el espectro de potencia del
movimiento browniano de una microesfera atrapada. Un sensor de posición
lee la intensidad de las interferencias entre el láser y la luz dispersada por la
15 muestra atrapada, que está relacionada con el desplazamiento x cuando el
sensor se sitúa en un plano conjugado del plano focal del condensador o de
la lente que recoge la luz del láser y de la muestra.
Las pinzas ópticas se han usado mucho como una herramienta poderosa
2 o para asir y ejercer fuerzas precisas sobre muestras microscópicas, y han
encontrado aplicación en numerosos campos de la ciencia, desde la física de
colides hasta la biología celular y molecular. En un sistema convencional de
pinzas ópticas, un haz láser altamente focal izado constituye una trampa
óptica única. En los últimos diez años, el uso de hologramas representados
2 5 en un modulador espacial de luz antes de la focalización ha permitido la
generación de patrones de trampas 30 programables. Estas pinzas ópticas
holográficas han aumentado enormemente la capacidad de manipulación de
la técnica.
3 o La patente US 6055106 describe la disposición de un elemento óptico
difractivo ("OOE, diffractive optical element" en inglés) en un plano conjugado
de la pupila de entrada de la lente objetivo usada para focal izar el haz láser.
El haz de entrada incidente sobre el OOE se divide en un haz de salida
estructurado característico de la naturaleza del OOE. El OOE puede incluir
3 5 hologramas generados por ordenador que dividen el haz de entrada en un
patrón 30, para formar una disposición tridimensional de trampas ópticas. ElOOE puede ser una matriz de cristal líquido de fase que sufre cambios
grabados con patrones holográficos generados por ordenador.
Sin embargo, las aplicaciones de las pinzas ópticas holográficas son
restringidas debido a la imposibilidad de medir con precisión la fuerza ejercida
5 cuando se usa más de una trampa porque, cuando se generan múltiples
trampas con las pinzas ópticas holográficas, la señal recibida por el
fotodetector contiene información mezclada de la luz dispersada por más de
una muestra atrapada, y a partir de ella no se pueden extraer las posiciones
individuales.
10
Existen técnicas para calibrar más de una trampa que consisten en captar
imágenes de toda la muestra con una cámara y seguir el movimiento de cada
objeto individualmente. Sin embargo, las cámaras convencionales tienen una
resolución temporal limitada para ser utilizadas en el análisis del espectro de
15 potencia, que es, por tanto, substituido por otros métodos de medida menos
precisos. Recientemente se han usado cámaras de alta velocidad con ancho
de banda comparable al de los fotodetectores, aunque tienen menos
resolución que éstos y son muy caras.
2 o EXPLICACIÓN DE LA INVENCIÓN
Es objeto de la presente invención proporcionar un método para manipular
una pluralidad de muestras microscópicas que permite a la vez una medida
precisa y económica de la fuerza ejercida por las pinzas ópticas. El método
2 5 compatibiliza la manipulación de muestras microscópicas con pinzas ópticas
holográficas con la medida precisa de fuerza.
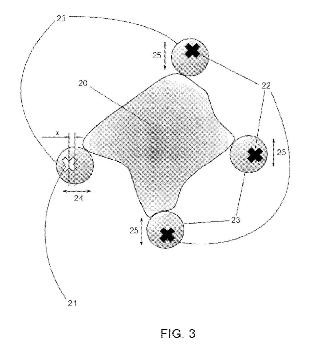
La invención incluye la generación de trampas ópticas holográficas con
polarizaciones ortogonales, como se detalla a continuación. En el sistema de
3 o detección de posiciones para medida de fuerzas, un poi a rizador selecciona la
luz de una única partícula atrapada, mientras la luz de todas las otras
muestras atrapadas se anula. Esto permite la manipulación múltiple mientras
una de las trampas actúa como un sensor de fuerza, usando un método
preciso como la interferometría por BFP y el análisis del espectro de potencia.
35
Las trampas ópticas se generan mediante un modulador espacial de luz
difractivo, a través del cual la luz se propaga con diferente índice derefracción (ordinario o extraordinario) dependiendo de la polarización de la luz
incidente. Los inventores han señalado que, mientras la componente
propagada en la dirección del índice de refracción extraordinario es modulada
por el modulador espacial de luz difractivo, la componente ortogonal en
5 dirección del índice de refracción ordinario se mantiene nomodulada después
de atravesar el dispositivo.
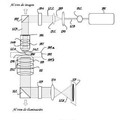
De acuerdo con un aspecto de la invención, el método además comprende
las siguientes etapas:
1 o polarizar el haz láser incidente en una dirección que sea substancialmente
diferente a la dirección del índice de refracción extraordinario del modulador
espacial de luz difractivo (este paso se hace antes de la modulación del haz
láser) ;
crear una trampa óptica, distinta del patrón de trampas ópticas holográficas
15 generadas gracias a dicha modulación, para una muestra microscópica
distinta utilizando la componente del haz polarizado que es ortogonal a la
dirección del índice de refracción extraordinario del modulador espacial de luz
difractivo y que, de ese modo, no esté modulada (ésta es la trampa que actúa
como un sensor de fuerza) ;
2 o separar la polarización de la luz dispersada por el patrón de trampas ópticas
holográficas y por la trampa óptica distinta;
captar la imagen de la luz dispersada por la trampa óptica distinta con un
detector después de ser separada por polarización; y
medir las fuerzas ópticas que actúan sobre...
Reivindicaciones:
1. Método para manipular muestras microscópicas y medir las fuerzas que
actúan sobre ellas, que comprende las etapas de generar un haz láser y
5 modular el haz láser mediante un modulador espacial de luz difractivo para
generar un patrón de trampas ópticas holográficas para manipular una
pluralidad de muestras microscópicas; caracterizado porque además
comprende las etapas de: polarizar el haz láser incidente en una dirección
que es substancialmente diferente a la dirección del índice de refracción
1 o extraordinario del modulador espacial de luz difractivo, antes de la etapa de
modulación; crear una trampa óptica, distinta del patrón de trampas ópticas
holográficas, para una muestra microscópica distinta usando la componente
del haz polarizado que es ortogonal a la dirección del índice de refracción
extraordinario del modulador espacial de luz difractivo y que, de ese modo, no
15 esté modulada; separar por polarización la luz dispersada por el patrón de
trampas ópticas holográficas y por la trampa óptica distinta; captar la imagen
de la luz dispersada por la trampa óptica distinta con un detector después de
ser separada por polarización; y medir las fuerzas ópticas que actúan sobre la
muestra microscópica distinta a partir de las señales proporcionadas por el
2 o detector.
2. Método según la reivindicación 1, donde el modulador espacial de luz
difractivo es un dispositivo de cristal líquido nemático alineado paralelamente,
como un dispositivo de cristal líquido sobre silicio, LCoS.
25
3. Método según cualquiera de las reivindicaciones 1 o 2, donde el haz láser
incidente está linealmente polarizado y su dirección se puede seleccionar
mediante una lámina de media onda situada antes del modulador espacial de
luz difractivo.
30
4. Método según la reivindicación 3, donde la dirección de polarización
seleccionable del haz láser está inclinad.
30. 60° respecto a la dirección del
índice de refracción extraordinario.
35 5. Método según cualquiera de las reivindicaciones anteriores, donde la luz
dispersada por el patrón de trampas ópticas holográficas y la trampa óptica
distinta se recoge con una lente condensadora.
6. Método según cualquiera de las reivindicaciones anteriores, donde el detector es un fotodetector de posiciones.
5 7. Método según la reivindicación 6, donde el fotodetector de posiciones es un detector de cuatro cuadrantes o un sensor de posiciones de efecto lateral.
10 8. Método según cualquiera de las reivindicaciones 1 a 5, donde el detector es una cámara. 9. Método según cualquiera de las reivindicaciones anteriores, donde el movimiento de la muestra microscópica distinta en la trampa óptica distinta se analiza mediante interferometría en el plano focal.
15 1O. Método según cualquiera de las reivindicaciones anteriores, donde la separación por polarización se realiza mediante un polarizador lineal.
2 o 11. Método según cualquier de las reivindicaciones 1 o 1 O, donde la separación por polarización y la detección están integradas en un único dispositivo
12. Método según cualquiera de las reivindicaciones anteriores, que además comprende la etapa de corregir las aberraciones de la trampa óptica distinta.
2 5 13. Método según cualquiera de las reivindicaciones anteriores, donde el modulador espacial de luz difractivo se sitúa en una plataforma móvil que permite mover la trampa distinta no modulada en el plano de la muestra.
3 o 14. Método según cualquiera de las reivindicaciones anteriores, donde la medida de las fuerzas ópticas se hace directamente a partir de cambios en el momento de la luz.
35 15. Método según cualquiera de las reivindicaciones 1 a 13, donde la medida de las fuerzas ópticas se hace indirectamente mediante la medida de posiciones.
Patentes similares o relacionadas:
 Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
Método para determinar la temperatura neutra de piezas de trabajo alargadas, del 25 de Septiembre de 2019, de Goldschmidt Thermit GmbH: Método para calcular la temperatura neutra o el estado libre de tensión de un tramo de carril , en donde el tramo de carril está sometido a tensión longitudinal […]
 Procedimiento para detectar tensiones termomecánicas variables en el tiempo y/o gradientes de tensión a través del espesor de las paredes de cuerpos metálicos, del 28 de Agosto de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para detectar tensiones termomecánicas y/o gradientes de tensión, variables en el tiempo, a través del espesor de las paredes de cuerpos metálicos , en particular […]
Procedimiento para detectar tensiones termomecánicas variables en el tiempo y/o gradientes de tensión a través del espesor de las paredes de cuerpos metálicos, del 28 de Agosto de 2019, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para detectar tensiones termomecánicas y/o gradientes de tensión, variables en el tiempo, a través del espesor de las paredes de cuerpos metálicos , en particular […]
Sonda para identificación de elemento de fijación y medición de carga ultrasónica, del 3 de Diciembre de 2018, de INNOVATION PLUS, L.L.C.: Un aparato para su uso con un elemento de fijación que tiene un transductor ultrasónico acoplado al elemento de fijación y una marca de […]
Análisis de elementos de soporte de carga, del 12 de Noviembre de 2018, de Pfeifer Seil- und Hebetechnik GmbH: Procedimiento de análisis de un elemento de soporte de carga de una estructura arquitectónica, comprendiendo el procedimiento proporcionar el elemento de soporte […]
 Procedimiento para la corrección de la influencia de líneas de transmisión de señal sobre cambios del tiempo de tránsito de señal en mediciones por ultrasonidos, del 20 de Enero de 2016, de AMG Intellifast GmbH: Procedimiento para la corrección de la influencia de líneas de transmisión de señal y aparatos electrónicos de medición en los cambios […]
Procedimiento para la corrección de la influencia de líneas de transmisión de señal sobre cambios del tiempo de tránsito de señal en mediciones por ultrasonidos, del 20 de Enero de 2016, de AMG Intellifast GmbH: Procedimiento para la corrección de la influencia de líneas de transmisión de señal y aparatos electrónicos de medición en los cambios […]
 METODO Y APARATO DE MEDIDA DE LAS FUERZAS OPTICAS QUE ACTUAN SOBRE UNA PARTICULA, del 20 de Septiembre de 2012, de UNIVERSIDAD DE BARCELONA: Método y aparato de medida de las fuerzas ópticas que actúan sobre una partícula.
Aparato y método para medir las fuerzas ópticas que actúan […]
METODO Y APARATO DE MEDIDA DE LAS FUERZAS OPTICAS QUE ACTUAN SOBRE UNA PARTICULA, del 20 de Septiembre de 2012, de UNIVERSIDAD DE BARCELONA: Método y aparato de medida de las fuerzas ópticas que actúan sobre una partícula.
Aparato y método para medir las fuerzas ópticas que actúan […]
CIRCUITO EXCITADOR/DETECTOR ULTRASONICO PARA APRETAR UN FIJADOR AUTOMATIZADO., del 16 de Junio de 1998, de INGERSOLL-RAND COMPANY: SE PRESENTA UN CIRCUITO EXCITADOR/DETECTOR DE SEÑALES ULTRASONICAS, EL CUAL SE PUEDE ADAPTAR PARA QUE REALICE UNA SERIE DE FUNCIONES DE APRIETE […]
 PROCEDIMIENTO PARA ESTABLECER EL ESFUERZO SUFRIDO POR ALABES DE UNA TURBINA DURANTE EL FUNCIONAMIENTO, ASI COMO DISPOSITIVO CORRESPONDIENTE PARA LLEVAR A CABO EL PROCEDIMIENTO, del 1 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para establecer los esfuerzo sufridos por álabes de paleta dispuestos en una turbina con un eje de rotor montado giratoriamente en […]
PROCEDIMIENTO PARA ESTABLECER EL ESFUERZO SUFRIDO POR ALABES DE UNA TURBINA DURANTE EL FUNCIONAMIENTO, ASI COMO DISPOSITIVO CORRESPONDIENTE PARA LLEVAR A CABO EL PROCEDIMIENTO, del 1 de Noviembre de 2007, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para establecer los esfuerzo sufridos por álabes de paleta dispuestos en una turbina con un eje de rotor montado giratoriamente en […]