MÁQUINA PARA LA INSPECCIÓN Y CLASIFICACIÓN DE FRUTOS Y MÉTODO PARA INSPECCIONAR Y CLASIFICAR FRUTOS QUE UTILIZA DICHA MÁQUINA.
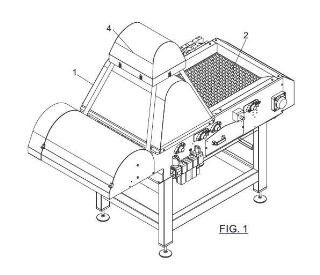
Máquina para la inspección y clasificación de frutos, que tiene conectada a un sistema de control una unidad de inspección (1) y medios de expulsión (3) que expulsan los frutos inspeccionados por la unidad de inspección (1) que no cumplen con ciertas condiciones prefijadas por el sistema de control.
Los medios de transporte de los productos tienen una pluralidad de rodillos (7) giratorios que hacen girar a los frutos que transportan al mismo tiempo que avanzan, proporcionando múltiples vistas de dichos frutos al sistema de visión artificial (4), y un tramo final para la caída de los frutos con una superficie curva con radio variable decreciente. La presente invención adicionalmente consiste en un método para inspeccionar y clasificar frutos que hace girar éstos durante su transporte e inspección y limita la aceleración de su salida de la máquina mediante una superficie curva de radio decreciente.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2010/003423.
Solicitante: MULTISCAN TECHNOLOGIES, S.L.
Nacionalidad solicitante: España.
Inventor/es: SOLER ESTEBAN,ALVARO, VAN OLMEN,Simon Hendrik.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A23N15/00 NECESIDADES CORRIENTES DE LA VIDA. › A23 ALIMENTOS O PRODUCTOS ALIMENTICIOS; SU TRATAMIENTO, NO CUBIERTO POR OTRAS CLASES. › A23N MAQUINAS O APARATOS PARA TRATAR LAS COSECHAS DE FRUTAS, VEGETALES O BULBOS DE FLOR A GRANEL, NO PREVISTOS EN OTRO LUGAR; PELADO DE FRUTAS O VERDURAS A GRANEL; APARATOS PARA LA PREPARACION DE ALIMENTOS PARA ANIMALES (máquinas para cortar la paja o el forraje A01F 29/00; disgregación, p.ej. trituración, B02C; separación, p.ej. corte, división, recortado, B26B, B26D). › Máquinas o aparatos destinados a otros tratamientos de frutas o verduras para las necesidades del hombre; Máquinas o aparatos para desmochar o pelar los bulbos de flor.
- B07C5/34 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B07 SEPARACION DE SOLIDOS; CLASIFICACION. › B07C CLASIFICACION POSTAL; CLASIFICACION DE OBJETOS INDIVIDUALES O DE UN MATERIAL A GRANEL MANIPULABLE PIEZA POR PIEZA COMO OBJETOS INDIVIDUALES (especialmente adaptada a un fin determinado previsto en otra clase, ver la clase apropiada, p. ej. A43D 33/06, B23Q 7/12). › B07C 5/00 Clasificación según una característica o una particularidad de los objetos o del material a clasificar, p. ej. clasificación controlada por un dispositivo que detecta o mide esta característica o particularidad; Clasificación con ayuda de dispositivos manuales, p. ej. sistemas de agujas (clasificación exclusivamente manual B07C 7/00; separación de diferentes sólidos unos de otros por cribado, tamizado o utilización de corrientes de gas, u otra separación por vía seca para materiales a granel B07B; selección de monedas G07D). › Clasificación en función de otras propiedades particulares.
Fragmento de la descripción:
Máquina para la inspección y clasificación de frutos y método para inspeccionar y clasificar frutos que utiliza dicha máquina
CAMPO TÉCNICO DE LA INVENCIÓN
La presente invención pertenece al campo técnico de las máquinas de inspección y clasificación de objetos, concretamente a las máquinas de inspección y clasificación de frutos y pequeños productos comestibles, y más concretamente a las máquinas que transportan los frutos hasta una unidad de inspección y las retiran de ésta, expulsando a los frutos que no cumplen ciertas condiciones prefijadas por un sistema de control, con lo que se realiza una clasificación de los frutos.
ANTECEDENTES DE LA INVENCIÓN
Hasta ahora se ha utilizado un gran número de aparatos para la inspección y clasificación de pequeños objetos, concretamente frutos y pequeños productos comestibles, basados en el transporte por medios continuos, tales como cintas, cadenas o bandas transportadoras, de los frutos a inspeccionar, hasta una sección en la que se realiza la inspección de éstos. Esta inspección, dependiendo del caso, puede consistir en diferentes análisis, tales como análisis de tamaños, formas, defectos existentes, o una clasificación o separación de los frutos en base al tamaño, forma, etc.
Ejemplos de estos aparatos para la inspección de frutos son los aparatos para la clasificación automática de productos agrícolas tales como frutos, con un transportador de rodillos que basculan para distribuir los productos a diferentes trayectos auxiliares, y un puesto de medición.
Otros están formados por un tren de tratamiento y manipulación de frutos y vegetales que también tiene un transportador de preselección que por medio de rodillos deriva los productos hacia diferentes puestos. Otro transportador calibrador desestima las unidades demasiado pequeñas o grandes.
Estas máquinas presentan el inconveniente de no realizar análisis ni selecciones muy detalladas ni precisas, no detectando pequeñas variaciones de forma ni defectos apreciables visualmente.
Para solucionar estos problemas, en la actualidad existen máquinas clasificadoras que mediante cámaras inspeccionan artículos pequeños que se desplazan en una cinta transportadora, pero presentan el problema de ofrecer un número de vistas del producto muy limitado, a no ser que se instalen muchas cámaras para poder obtener muchas vistas de los artículos, lo que incrementa el coste del sistema de inspección, así como el de montaje de éste. Además hay que tener en cuenta, que instalar cámaras por debajo de la máquina para obtener vistas inferiores del producto supone un problema de suciedad constante en dichas cámaras. Concretamente, ciertos sistemas hacen avanzar y girar a los productos mediante rodillos por debajo de un sistema de visión, lo que proporciona múltiples vistas al sistema de visión. Este sistema presenta un problema cuando el producto a inspeccionar es muy pequeño, porque los huecos entre los rodillos deben ser muy pequeños, y, o bien no permiten una expulsión de los productos desde el interior a través de dichos huecos, o si la permiten, al ser los productos tan pequeños, la expulsión de cada uno de los productos afecta a los productos cercanos, quedando desplazados, o incluso siendo expulsados productos que no deberían serlo. Para evitar estos problemas, la expulsión se debe hacer desde el exterior, por lo que se tiene que hacer justo cuando los productos abandonan el tren de rodillos, en el aire, pero esto tiene el inconveniente de que se presenta un problema de inestabilidad en la salida debido a la aceleración sufrida por los productos al pasar de un tramo recto del transportador a uno curvo. Esta aceleración puntual conlleva cambios en la trayectoria normal de salida de los productos del transportador, lo cual imposibilita su expulsión precisa, al no estar en el lugar estimado en el instante de tiempo estimado.
Era por tanto deseable un sistema que consiguiera una inspección y clasificación eficiente de frutos y pequeños productos, evitando los inconvenientes existentes en los anteriores sistemas del estado de la técnica.
DESCRIPCIÓN DE LA INVENCIÓN
La presente invención resuelve los problemas existentes en el estado de la técnica mediante una máquina para la inspección y clasificación de frutos, que está formada principalmente por una unidad de inspección de los frutos conectada a un sistema de control, unos medios de transporte que los llevan hasta la unidad de inspección y los sacan de ésta una vez realizada, y unos medios de expulsión situados al final de los medios de transporte que expulsan de la máquina los frutos que una vez inspeccionados por la unidad de inspección no cumplen con ciertas condiciones prefijadas por el sistema de control, es decir, clasifican los productos en base a ciertas condiciones prefijadas por el sistema de control.
La unidad de inspección tiene un sistema de visión artificial que está formado por al menos una cámara. Como se ha indicado anteriormente, la unidad de inspección está conectada a un sistema de control, el cual controla todo el funcionamiento de la máquina. Este sistema de control recibe la imagen tomada por la unidad de inspección, y de acuerdo con varios parámetros prefijados que tiene almacenados decide si entregar el fruto a unos medios receptores de éste, o expulsarlo por no cumplir determinados requisitos, como por ejemplo tener un tamaño dentro de un rango, o una forma determinada, o ciertas características en su apariencia externa, etc.
Los medios de transporte tienen un tramo inicial que conduce los frutos hasta la unidad de inspección, y un tramo final que los saca de ésta, y que los conduce a medios receptores por diferentes salidas, dependiendo de las características del fruto que han sido inspeccionadas en la unidad de inspección.
En la presente invención los medios de transporte consisten en una cinta transportadora formada por una pluralidad de rodillos giratorios, los cuales hacen girar a los frutos que transportan en las cunas, o espacios entre rodillos, al mismo tiempo que estos productos avanzan, proporcionando de esta forma múltiples vistas de los frutos al sistema de visión artificial, sin la necesidad de que dicho sistema de visión disponga de diferentes cámaras en distintas posiciones para tomar las diferentes vistas. Así, si se desea, con una única cámara, se obtendrían diferentes vistas de los frutos a inspeccionar.
Preferentemente, los rodillos de esta cinta transportadora tienen velocidad de giro variable, y diferentes velocidades de giro en diferentes tramos de la cinta, que ayuda al posicionamiento de los frutos cuando es necesario, esto es, sobre todo en la unidad de inspección, para que los frutos entren en ella en diferentes posiciones determinadas para su inspección y que ofrezcan diferentes vistas al sistema de visión artificial. Además, la velocidad de giro variable de los rodillos proporciona la posibilidad de adaptar y ajustar el giro de los rodillos en función del tamaño del fruto a inspeccionar. Otra de las ventajas que presenta la velocidad de giro variable de los rodillos es poder posicionar ciertos frutos, dependiendo de su configuración, para una mejor inspección de éstos. Por ejemplo, cuando se inspeccionan cerezas es conveniente poder posicionar el pedúnculo de éstas hacia atrás antes de que entren en la unidad de inspección, y luego poder girar las cerezas 180º hacia delante en la unidad de inspección, sin que el pedúnculo les obligue a cambiar de cuna o alojamiento entre rodillos. Adicionalmente, la velocidad de giro variable permite hacer girar el producto con mayor velocidad en la zona de alimentación de producto que en el resto, con lo que se consigue una mejor distribución del producto sobre la cinta, favoreciendo el posicionamiento de una unidad en cada cuna o espacio entre rodillos.
En la máquina objeto de la presente invención, el tramo final de los medios de transporte tiene al final de éste una superficie curva para que los frutos caigan de estos medios de transporte y salgan de la máquina, una vez inspeccionados. Esta constitución, en la que la superficie curva es de radio constante origina una inestabilidad en la salida de los productos, que supone una trayectoria de salida desigual. Esta inestabilidad se produce al pasar del tramo recto de los medios de transporte al tramo curvo, y se debe a que el radio que describe el centro de masas de los productos en el tramo curvo es mayor que el radio que describe la superficie interna de los medios de transporte en dicho tramo. Esta diferencia de radios hace que se transmita al producto un incremento repentino de velocidad, que origina una aceleración puntual elevada que desestabiliza la salida de los productos....
Reivindicaciones:
1. Máquina para la inspección y clasificación de frutos, que comprende
-una unidad de inspección (1) que inspecciona los frutos, conectada a un sistema de control, que comprende un sistema de visión artificial (4) , el cual comprende a su vez al menos una cámara (5)
-medios de transporte (2) , los cuales transportan los frutos mediante un tramo inicial hasta la unidad de inspección (1) , y los sacan de ésta mediante un tramo final cuando la inspección ha sido realizada, y
-medios de expulsión (3) dispuestos en el tramo final de los medios de transporte (2) , y conectados al sistema de control, los cuales expulsan de la máquina los frutos inspeccionados por la unidad de inspección (1) que no cumplen con ciertas condiciones prefijadas por dicho sistema de control,
dicha máquina para la inspección y clasificación de frutos caracterizada por que
-los medios de transporte (2) comprenden una cinta transportadora formada por una pluralidad de rodillos (7) giratorios que hacen girar a los frutos que transportan al mismo tiempo que avanzan, proporcionando múltiples vistas de dichos frutos al sistema de visión artificial (4) ,
-y por que el tramo final de los medios de transporte (2) comprende al final de éste una superficie curva para la caída de los frutos de dichos medios de transporte (2) y su salida de la máquina, teniendo dicha superficie curva un radio variable decreciente a lo largo de una porción que discurre entre su inicio y al menos hasta el punto en el que los frutos transportados caen de los medios de transporte (2) .
2. Máquina para la inspección y clasificación de frutos, según la reivindicación 1, caracterizada por que los medios de transporte (2) comprenden una pluralidad de tramos con diferentes velocidades de giro de los rodillos (7) .
3. Máquina para la inspección y clasificación de frutos, según cualquiera de las reivindicaciones anteriores, caracterizada por que comprende una pluralidad de duchas limpiadoras dispuestas a lo largo del tramo inicial de los medios de transporte (2) para la limpieza de los frutos antes de que sean inspeccionados en la unidad de inspección (1) .
4. Máquina para la inspección y clasificación de frutos, según cualquiera de las reivindicaciones anteriores, caracterizada por que
-el sistema de visión artificial (4) comprende al menos un emisor láser (6)
-y por que la cámara (5) toma la imagen del perfil del láser emitido por el emisor láser (6) y se refleja sobre los frutos a inspeccionar.
5. Máquina para la inspección y clasificación de frutos, según la reivindicación anterior, caracterizada por que
-el emisor láser (6) permanece fijo,
-y por que el perfil del láser emitido por el emisor láser (6) y reflejado sobre los frutos a inspeccionar es una línea,
siendo la imagen tomada por la cámara (5) una acumulación de perfiles consecutivos del láser emitido por el emisor láser (6) y reflejados sobre las diferentes partes de los frutos desplazados por los medios de transporte (2) .
6. Máquina para la inspección y clasificación de frutos, según la reivindicación 4, caracterizada por que una única cámara (5) toma imágenes de los frutos e imágenes de los perfiles emitidos por el emisor láser (6) .
7. Máquina para la inspección y clasificación de frutos, según cualquiera de las reivindicaciones anteriores, caracterizada por que la unidad de inspección (1) comprende una pluralidad de sistemas de iluminación pulsados, que proporcionan iluminación con distinto espectro, tomando una única cámara (5) imágenes en diferentes espectros.
8. Máquina para la inspección y clasificación de frutos, según la reivindicación anterior, caracterizada por que al menos uno de los sistemas de iluminación es un emisor láser (6) .
9. Máquina para la inspección y clasificación de frutos, según cualquiera de las reivindicaciones anteriores, caracterizada por que los medios de expulsión (3) comprenden al menos un dispositivo soplante (8) de aire a presión que expulsa los frutos en base a las condiciones prefijadas por el sistema de control.
10. Máquina para la inspección y clasificación de frutos, según la reivindicación anterior, caracterizada por que al menos un dispositivo soplante (8) está dispuesto bajo los medios de transporte (2) , realizándose la expulsión de los frutos que no cumplen con las condiciones prefijadas.
11. Máquina para la inspección y clasificación de frutos, según la reivindicación 9, caracterizada por que al menos un dispositivo soplante (8) está dispuesto fuera de los medios de transporte (2) , realizándose la expulsión de los frutos en base a las condiciones prefijadas una vez que abandonan los medios de transporte (2) por la superficie curva (9) de su tramo final.
12. Método para inspeccionar y clasificar frutos que utiliza la máquina de las reivindicaciones 1 a 11, que comprende
-transportar los frutos en continuo hasta la unidad de inspección (1) mediante medios de transporte (2) ,
-inspeccionar los frutos en continuo en la unidad de inspección (1) , mediante el sistema de visión artificial (4) de dicha unidad de inspección (1) ,
-y transportar los frutos en continuo desde la unidad de inspección (1) hasta una salida de la máquina para su recogida,
dicho método para inspeccionar y clasificar frutos caracterizado por
-hacer girar a los productos durante su transporte e inspección mediante rodillos (7) de los medios de
transporte (2) , proporcionando múltiples vistas de los frutos al sistema de visión artificial (4) de la unidad de 15 inspección (1) ,
-por limitar la aceleración de salida de los frutos a un límite prefijado mediante una superficie curva de radio variable decreciente a lo largo de una porción entre el inicio de la superficie curva y al menos hasta el punto en el que los frutos transportados caen de los medios de transporte (2) ,
-y por expulsar en continuo los frutos inspeccionados por la unidad de inspección (1) en base a ciertas 20 condiciones prefijadas por el sistema de control.
Patentes similares o relacionadas:
Procedimiento y aparato para la inspección no destructiva de frutas que tienen un eje de simetría rotacional, del 15 de Julio de 2020, de MICROTEC, S.R.L: Un procedimiento para la inspección no destructiva de una fruta que tiene un eje de simetría rotacional, que comprende los pasos de: […]
Inspección óptica de recipientes, del 6 de Mayo de 2020, de OWENS-BROCKWAY GLASS CONTAINER INC.: Un aparato para inspeccionar una boca (M) de un recipiente (C) que tiene una base (B) con una picada (P) opuesta a la boca del recipiente, incluyendo dicho aparato: […]
Dispositivo y procedimiento para inspeccionar recipientes, del 8 de Abril de 2020, de Syntegon Technology GmbH: Dispositivo para inspeccionar recipientes , que comprende al menos un módulo de inspección para inspeccionar recipientes , al […]
MÉTODO Y SISTEMA PARA DETERMINAR LA FABRICACIÓN DE UN ENVASE DE VIDRIO CON SU NÚMERO DE MOLDE, del 26 de Marzo de 2020, de Vitro, S.A.B. de C.V: La presente invención se relaciona con método y sistema para determinar la fabricación de un envase de vidrio con su número de molde. El método consiste en establecer […]
SISTEMA Y MÉTODO DE SEPARACIÓN DE ACERO/MAGNETITA, PARA SOLUCIONAR DE MANERA INTEGRAL LA PROBLEMÁTICA ASOCIADA A LOS GRANDES ACOPIOS DE MINERAL DE MAGNETITA MEZCLADAS CON SCRAP DE BOLAS DE ACERO, PROVENIENTES DE PROCESOS DE BENEFICIO DE LA GRAN MINERÍA, del 19 de Marzo de 2020, de JOHN SUN: La presente invención se relaciona con un sistema y método de separación de acero/magnetita. El sistema comprende al menos buzón de alimentación , […]
Un procedimiento y aparato de clasificación de neumáticos, del 4 de Marzo de 2020, de Black Bear Carbon B.V: Un procedimiento de clasificación de neumáticos basado en sus componentes, caracterizado porque dichos neumáticos se clasifican en base a su […]
Dispositivo de selección de rechazos, del 23 de Enero de 2020, de JOSE BORRELL, S.A.: Dispositivo de selección de rechazos, en un conjunto de frutos secos desplazados sobre una cinta que comprende un elemento de soporte con una zona central […]
Sistema para distribución, empaquetado automático y devolución de productos editoriales, del 20 de Noviembre de 2019, de Klotzner, Stefan: Sistema para la distribución, empaquetado automático y devolución de productos editoriales que comprende: - un módulo de entrada ; - una báscula; […]