Lógica de control para un sistema de hélice.
Un sistema de control (20) que comprende:
un subsistema lógico de control del motor (24);
y
un subsistema lógico de control de la hélice (22) en comunicación con dicho subsistema lógico de control delmotor (24),
caracterizado porque dicho subsistema lógico de control de la hélice (22) tiene entradas para las señalesdel ángulo de la pala y del Angulo de la Palanca de Potencia y porque está configurado en uso para definir unmapa de Modo de Control de la Hélice (PCM) con una pluralidad de celdas de Modo de Control de la Hélice,en el que un mapa PCM está operativo para:
determinar el ángulo de pala mínimo permitido para el gobierno de la velocidad marcha adelante; y
determinar el ángulo de pala máximo permitido para el gobierno de la velocidad marcha atrás,
en el que cada una de dichas pluralidades de celdas de Modo de Control de la Hélice relaciona un Angulo dela Palanca de Potencia con un ángulo de la pala para determinar el estado de gobierno de la héliceseleccionado de uno de los siguientes:
gobierno marcha adelante activo;
gobierno marcha atrás activo; ó
gobierno desconectado
mediante la combinación de el Angulo de la Palanca de Potencia, el ángulo de la pala de la hélice, elmínimo ángulo de la pala permitido para gobernar la velocidad marcha adelante y el máximo ángulode la pala permitido para gobernar la velocidad marcha atrás, y
en el que cada una de dichas celdas de Modo de Control de la Hélice comunica una señal de solicitud depotencia mínima a la hélice para dicho sistema lógico de control del motor.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06255854.
Solicitante: HAMILTON SUNDSTRAND CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: ONE HAMILTON ROAD WINDSOR LOCKS, CT 06096-1010 ESTADOS UNIDOS DE AMERICA.
Inventor/es: DANIELSON, DAVID, R.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64C11/30 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64C AEROPLANOS; HELICOPTEROS (vehículos de colchón de aire B60V). › B64C 11/00 Hélices, p. ej. carenadas; Características comunes a hélices y rotores para giroaviones (rotores especialmente adaptados para giroaviones B64C 27/32). › Mecanismos de cambio del paso de pala.
- B64C11/34 B64C 11/00 […] › automáticos.
PDF original: ES-2401972_T3.pdf
Fragmento de la descripción:
Lógica de control para un sistema de hélice.
ANTECEDENTES DE LA INVENCIÓN La invención presente trata de un sistema de control de una hélice, y más en particular de la lógica de control de paso que controla la transición del gobierno de marcha adelante a marcha atrás.
Las hélices de paso variable se emplean en muchos tipos diferentes de aeroplanos que tienen propulsores que van desde motores de pistón a turbinas de gas. El control de hélice convencional requiere conocer cuando se desactiva el regulador de velocidad de la hélice y cuando el sentido de regulación se debe invertir para proporcionar una operación con empuje marcha atrás.
La transición desde la regulación en marcha adelante a marcha atrás requiere del paso por una zona conocida como el valle de la curva Cp (coeficiente de potencia de la hélice versus ángulo de las palas de la hélice para un ratio de avance dado) en el que la regulación no es posible. En el lado derecho de la curva Cp (donde la curva tiene una pendiente positiva) , el regulador de velocidad debe incrementar el ángulo de las palas de la hélice a medida que se incrementa la potencia de entrada para mantener una velocidad fija. En el lado izquierdo de la curva Cp (donde la pendiente es negativa) , el regulador debe hacer lo opuesto – reducir el ángulo de las palas para neutralizar el aumento de la potencia y mantener la velocidad de la hélice.
La activación y desactivación de la lógica de regulación junto con la modificación del sentido de la lógica de regulación ha sido realizada convencionalmente en forma de bucle abierto mediante el ajuste de constantes, temporizadores, o límites de régimen para permitir el paso del ángulo de las palas de la hélice desde el lado derecho de la curva Cp al lado izquierdo a medida que la hélice entra en el rango de empuje marcha atrás. Se requieren también constantes, temporizadores, y / o límites de régimen similares para permitir que la hélice abandone la zona de empuje a la marcha atrás y pase a lado derecho de la curva Cp donde se produce de nuevo empuje positivo. Este ajuste convencional de bucle abierto proporciona un sistema de control con transiciones efectivas hacia y desde la marcha atrás. Sin embargo, los sistemas convencionales están optimizados típicamente únicamente para un subconjunto de condiciones posibles de operación del aeroplano y poseen típicamente unos parámetros mínimos de ajuste de control para otras velocidades o altitudes de operación de manera que el sistema de la hélice puede producir niveles inaceptables de sobreempuje o infraempuje para la velocidad de la hélice cuando no está operando en las condiciones de operación óptimas del aeroplano.
De acuerdo con lo anterior, es deseable proporcionar un sistema de control de la hélice que optimice el rendimiento de la hélice para todas las condiciones de vuelo.
El documento EP0392968 A2 describe un control del paso de la hélice y de la regulación de la velocidad durante las transiciones mientras el aeroplano está en modo en tierra. El control del paso de la hélice es tal que el régimen de cambio de la potencia absorbida por la hélice no excede del régimen de cambio de la potencia entregada por el motor.
El documento EP0436231 A2 describe un aparato de control de paso para una hélice de paso variable en el que el ángulo de paso de la hélice está controlado para maximizar la fuerza de empuje que actúa sobre el aparato.
SUMARIO DE LA INVENCIÓN Un sistema lógico de control de paso de la hélice de acuerdo con la invención presente incluye en general un subsistema de lógica de control de la hélice que comunica con un subsistema de lógica de control del motor. La invención está caracterizada porque dichos subsistema de lógica de control de la hélice tiene entradas para las señales del ángulo de la pala y del Angulo de la Palanca de Potencia y por estar configurados durante el uso para definir un mapa de Modo de Control de la Hélice (PCM) con una pluralidad de celdas de Modo de Control de la Hélice, en el que el mapa PCM se puede operar para: determinar un ángulo de pala mínimo permitido para la regulación de la velocidad marcha adelante; y determinar un ángulo de pala máximo permitido para regular la velocidad marcha atrás, en el que cada uno de dicho conjunto de celdas de Modo de Control de la Hélice se relaciona un Angulo de la Palanca de Potencia con un ángulo de la pala para determinar un estado de regulación de la hélice seleccionado de entre uno de los siguientes: regulación marcha adelante activa; regulación marcha atrás activa; o regulación desactivada, mediante la combinación del Angulo de la Palanca de Potencia, ángulo de la pala de la hélice, el ángulo de pala mínimo permitido para la regulación de la velocidad marcha adelante y el máximo ángulo de pala permitido para la regulación de la velocidad marcha atrás, y en el que cada una de dichas celdas del Modo de Control de la Hélice comunica una señal de solicitud de potencia mínima de la hélice a dicho sistema de lógica de control del motor.
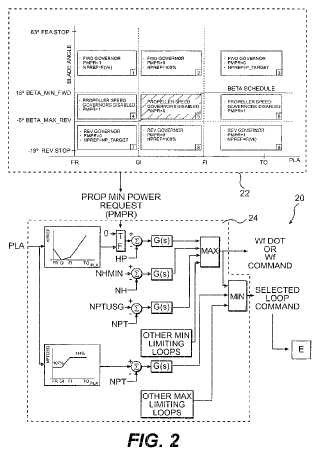
Una solicitud de empuje del piloto se introduce en el sistema como una entrada de Angulo de la Palanca de Potencia (PLA) . La señal PLA está relacionada con las condiciones de operación como por ejemplo Atrás Toda (FR) ; Punto Muerto en Tierra (GI) ; Punto Muerto en Vuelo (FI) ; y Despegue (TO) . En base a las condiciones de operación del a hélice y a la señal PLA, el subsistema de lógica de control de la hélice determina un Modo de Control de la Hélice (PCM) que determina el estado adecuado de regulación de la hélice.
El subsistema de lógica de control de la hélice se utiliza en conjunción con el subsistema de lógica del sistema de control del motor para proporcionar una transición optimizada de la regulación de velocidad desde marcha adelante a marcha atrás en todas las condiciones de operación. Mediante la creación de un mapa PCM el ángulo de las palas con el coeficiente de potencia mínimo de la hélice basado en las condiciones de operación (número Mach y velocidad de la hélice) , se determina el ángulo de la pala mínimo permitido para la regulación de la velocidad marcha adelante y el ángulo de la pala máximo permitido para la regulación de la velocidad marcha atrás. Mediante la combinación del ángulo de la pala de la hélice actual, los ángulos máximo y mínimo para la regulación de la velocidad, la señal PLA, de termina el estado y el sentido de la regulación de velocidad de la hélice. En base a estas entradas, se genera un mapa de búsqueda PCM para encontrar la celda PCM asociada y configurar el sistema de la hélice para los algoritmos de control adecuados para todas las condiciones de operación y todas las acciones de la tripulación de vuelo.
Además de operar en todas las condiciones, la invención presente mantiene un control de la velocidad de la hélice de bucle cerrado durante el máximo tiempo posible mientras que los métodos tradicionales controlan la hélice de una manera en bucle abierto. El método de control de operación en bucle cerrado permite que la regulación de la velocidad de la hélice permanezca activa durante un mayor porcentaje de tiempo. Esto sirve para minimizar la magnitud de las sobrevelocidades de la hélice y / o subvelocidades de la hélice que podrían ocurrir de otra manera durante las transiciones hacia y desde la marcha atrás.
La invención presente por lo tanto proporciona un sistema de control de la hélice que tiene un rendimiento de la hélice optimizado en todo el rango de vuelo.
BREVE DESCRIPCION DE LOS DIBUJOS Las diferentes características y ventajas de esta invención se aclararán para aquellos versados en la técnica mediante la descripción detallada que sigue de las realizaciones preferidas. Los dibujos que acompañan la descripción detallada pueden ser descritos brevemente como sigue:
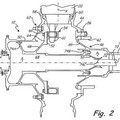
La Figura 1 es una vista en perspectiva general de una realización de un motor turbopropulsado por una turbina de gas de ejemplo para ser utilizado con la invención presente;
La Figura 2 es un diagrama de bloques esquemático de una lógica de control de la hélice que tiene una lógica de control de la hélice y una lógica de control del motor;
La Figura 3 es una representación gráfica de una curva Cp (coeficiente de potencia de la hélice versus ángulo de la pala de la hélice para un ratio de avance dado) ;
La Figura 4 es un diagrama de bloques esquemático del sistema lógico de control del paso de la hélice; y
La Figura 5A es una representación gráfica de un ejemplo de un vuelo de un aparato que representa gráficamente los parámetros de control del paso de la hélice;
La Figura 5B es una representación gráfica de PCMs para el ejemplo... [Seguir leyendo]
Reivindicaciones:
1. Un sistema de control (20) que comprende:
un subsistema lógico de control del motor (24) ; y un subsistema lógico de control de la hélice (22) en comunicación con dicho subsistema lógico de control del motor (24) , caracterizado porque dicho subsistema lógico de control de la hélice (22) tiene entradas para las señales del ángulo de la pala y del Angulo de la Palanca de Potencia y porque está configurado en uso para definir un mapa de Modo de Control de la Hélice (PCM) con una pluralidad de celdas de Modo de Control de la Hélice, en el que un mapa PCM está operativo para:
determinar el ángulo de pala mínimo permitido para el gobierno de la velocidad marcha adelante; y determinar el ángulo de pala máximo permitido para el gobierno de la velocidad marcha atrás,
en el que cada una de dichas pluralidades de celdas de Modo de Control de la Hélice relaciona un Angulo de la Palanca de Potencia con un ángulo de la pala para determinar el estado de gobierno de la hélice seleccionado de uno de los siguientes:
gobierno marcha adelante activo; gobierno marcha atrás activo; ó gobierno desconectado mediante la combinación de el Angulo de la Palanca de Potencia, el ángulo de la pala de la hélice, el mínimo ángulo de la pala permitido para gobernar la velocidad marcha adelante y el máximo ángulo de la pala permitido para gobernar la velocidad marcha atrás, y
en el que cada una de dichas celdas de Modo de Control de la Hélice comunica una señal de solicitud de potencia mínima a la hélice para dicho sistema lógico de control del motor.
2. El sistema como se describe en la reivindicación 1, en el que dicho subsistema lógico de control de la hélice (22) es un sistema de bucle cerrado.
3. Un método para cambiar entre gobierno marcha adelante y gobierno marcha atrás de un sistema de hélice que comprende los pasos de:
(1) crear un mapa de Modo de Control de la Hélice de un ángulo de la pala de la hélice con el coeficiente de potencia mínima de la hélice en base a las condiciones de operación;
(2) determinar el mínimo ángulo de la pala permitido para el gobierno de la velocidad marcha adelante a partir de dicho paso (1) ;
(3) determinar un ángulo de la pala máximo permitido para el gobierno de la velocidad marcha atrás a partir de dicho paso (1) ;
(4) determinar un ángulo de la palanca de potencia;
(5) determinar un ángulo de la pala de la hélice; y
(6) determinar el estado de gobierno de la hélice seleccionado de uno de los siguientes:
- gobierno marcha adelante activo;
- gobierno marcha atrás activo ; ó
- gobierno desconectado,
mediante la combinación del ángulo de la palanca de potencia, del ángulo de la pala de la hélice, del mínimo ángulo de la pala permitido para el gobierno de la velocidad marcha adelante y del máximo ángulo de la pala permitido para el gobierno de la velocidad marcha atrás;
(7) determinar una señal de solicitud de potencia mínima a la hélice buscando una celda de Modo de Control de la Hélice; y
(8) comunicar la señal de solicitud de potencia mínima de la hélice a un sistema lógico de control del motor.
4. Un método como el descrito en la reivindicación 3, en el que dicho paso (6) comprende además buscar una celda de Modo de Control de la Hélice en el mapa de Modo de Control de la Hélice en respuesta a dichos pasos (4) y (5) .
5. Un método como el escrito en la reivindicación 4, que comprende además los pasos de:
determinar una velocidad de la hélice de referencia buscando la celda de Modo de Control de la Hélice en el mapa de Modo de Control de la Hélice; y comunicar la velocidad de la hélice de referencia al subsistema lógico del control del motor (24) .
Patentes similares o relacionadas:
Medición de distancia de vuelo de ida, del 16 de Octubre de 2019, de LM Wind Power International Technology II ApS: Un sistema de monitoreo de alcance, comprendiendo el sistema: una primera antena configurada para ubicarse en una primera ubicación; una segunda antena […]
Palas de hélice accionadas por aleación de memoria de forma y conjuntos de hélice accionados por aleación de memoria de forma, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un conjunto de hélice , que comprende: un buje de hélice ; una pluralidad de palas de hélice (202a-202d, 702a-702d), unida cada una al buje de hélice, y […]
Rotor abierto contrarrotatorio (RACR), del 14 de Diciembre de 2016, de HAMILTON SUNDSTRAND CORPORATION: Un procedimiento para controlar un rotor abierto contrarrotatorio (RACR) que comprende: la medida de una velocidad de un primer rotor para obtener una velocidad medida […]
Procedimiento y aparato para hacer funcionar una hélice de aeronave, del 17 de Agosto de 2016, de BAE SYSTEMS PLC: Un procedimiento para hacer funcionar una hélice de aeronave, moviéndose la hélice a través de un fluido, comprendiendo el procedimiento: medir […]
Rotor abierto contra-rotatorio (CROR), del 6 de Julio de 2016, de HAMILTON SUNDSTRAND CORPORATION: Un método para controlar un rotor abierto contra-rotatorio (CROR) que comprende los pasos de: acoplar mecánicamente, con una leva u otro acoplamiento mecánico, […]
 Mecanismo de accionamiento del grado de inclinación de las palas, del 8 de Enero de 2014, de HAMILTON SUNDSTRAND CORPORATION: Un mecanismo de accionamiento del grado de inclinación de las palas para una multitud de palas de hélice sujeto en un cubo de palas, comprendiendo […]
Mecanismo de accionamiento del grado de inclinación de las palas, del 8 de Enero de 2014, de HAMILTON SUNDSTRAND CORPORATION: Un mecanismo de accionamiento del grado de inclinación de las palas para una multitud de palas de hélice sujeto en un cubo de palas, comprendiendo […]
 Sistema de hélices contrarrotativas que disponen de un dispositivo de puesta en bandera de las palas de las hélices, del 7 de Marzo de 2012, de SNECMA: Sistema de hélices contrarrotativas para turbo-máquina de aeronave, incluyendo una primera y unasegunda hélices centradas en un eje longitudinal […]
Sistema de hélices contrarrotativas que disponen de un dispositivo de puesta en bandera de las palas de las hélices, del 7 de Marzo de 2012, de SNECMA: Sistema de hélices contrarrotativas para turbo-máquina de aeronave, incluyendo una primera y unasegunda hélices centradas en un eje longitudinal […]
SISTEMA DE ACCIONAMIENTO DE ENCLAVAMIENTO DE PASO DE HÉLICE CONTROLADA, del 16 de Febrero de 2012, de HAMILTON SUNDSTRAND CORPORATION: Un sistema propulsor que comprende: un circuito (PCc) de presión de paso grueso que suministra una presión de paso grueso; un circuito […]