Dispositivo para la detección de vehículos en una superficie de tráfico.
Dispositivo (1) para la detección de vehículos (2) en una superficie de tráfico (3),
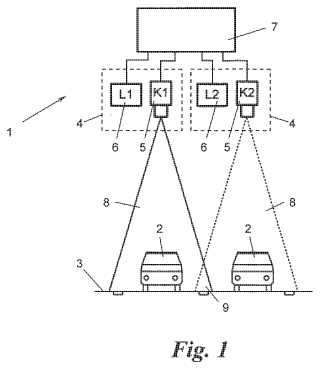
caracterizado por al menosdos cámaras de tiempo de vuelo (5) que interactúan con correspondientes emisores luminosos (6) para generardiferentes imágenes de distancia (E(t)) de la superficie de tráfico (3), estando conectadas las cámaras a undispositivo de evaluación común (7) para la detección de vehículos (2) en las imágenes de distancia (E(t)) y estandodispuestas por encima de la superficie de tráfico, estando diseñados los emisores luminosos (6) para emitir una luzdiferente, detectable sólo por la cámara de tiempo de vuelo (5) correspondiente en cada caso, y presentando lascámaras de tiempo de vuelo (5) respectivamente campos visuales rectangulares (8) que están dispuestos giradosalrededor de sus ejes visuales respecto a la orientación original en la que los lados más largos del campo visualrectangular están orientados en paralelo a la dirección de circulación de la superficie de tráfico.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09450189.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: ÖHRENEDER,CHRISTIAN, RAMOSER,HERBERT, HOCHSTÖGER,STEFAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio (G01S 17/66 tiene prioridad).
- G01S17/06 G01S 17/00 […] › Sistemas que determinan los datos de posición de un blanco.
- G01S17/89 G01S 17/00 […] › para la cartografía o la formación de imágenes.
- G01S7/48 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › de sistemas de acuerdo con el grupo G01S 17/00.
- G08G1/015 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › con disposiciones para distinguir dos o más tipos de vehículos, p. ej. distinción entre automóviles y ciclos.
- G08G1/04 G08G 1/00 […] › que utilizan detectores ópticos o ultrasónicos.
PDF original: ES-2401668_T3.pdf
Fragmento de la descripción:
Dispositivo para la detección de vehículos en una superficie de tráfico.
La presente invención se refiere a un dispositivo para la detección de vehículos en una superficie de tráfico según el preámbulo de la reivindicación 1.
En el sector de la ingeniería del tráfico es una tarea recurrente reconocer y clasificar vehículos u objetos generales en una superficie de tráfico y seguir el desarrollo de sus movimientos. Estas informaciones se usan, por ejemplo, en los sistemas de peaje para comprobar el cumplimiento del pago del peaje. Sin embargo, el reconocimiento y la clasificación de vehículos u objetos son necesarios también para detectar accidentes o elaborar estadísticas de tráfico.
Un método conocido para el reconocimiento, el seguimiento y la clasificación de objetos es el uso de escáneres láser. Los escáneres láser se montan por encima o a los lados de la calzada y detectan los objetos durante el paso. Una desventaja de esta solución radica en que los escáneres láser exploran los objetos sólo en un plano y, por tanto, la detección completa de los objetos es posible sólo en combinación con el movimiento de los vehículos. La medición se ve afectada si los objetos no se mueven uniformemente a través de la zona de exploración. Así, por ejemplo, es imposible medir la longitud del objeto o sólo es posible de manera inexacta. Este procedimiento no resulta adecuado en particular al producirse congestiones de tráfico o situaciones de "stop and go" (parada y arranque) .
Otra solución conocida consiste en detectar los objetos con ayuda de cámaras estéreo. En el caso de este procedimiento, los objetos se detectan con al menos dos cámaras desde diferentes direcciones de observación. A partir de la posición geométrica de los puntos correspondientes en las imágenes captadas por las cámaras se puede calcular la posición de los puntos en el espacio tridimensional. La desventaja radica en que para calcular la distancia hay que localizar los puntos correspondientes en las distintas imágenes, lo que implica un coste de cálculo considerable. Además, el cálculo es fiable sólo en puntos de objeto con cambios locales en el contenido de la imagen (textura) . En las superficies con un color considerablemente uniforme no es posible una medición fiable, de modo que los valores de distancia no se pueden medir en una trama densa, sino sólo en zonas especiales de la imagen.
Por último, es conocida también la detección de objetos con cámaras. Sin embargo, la imagen sola no permite inferir con exactitud la posición del objeto en el espacio tridimensional. Además, la medición de los objetos y la determinación de la velocidad son inexactas.
Un dispositivo del tipo mencionado al inicio es conocido por el documento DE20200800078U1 que describe una cámara "time of flight" (tiempo de vuelo, TOF) que está integrada en un semáforo y se identifica también como cámara sensor de mezcla fotónica (photonic mixing device, PMD) . Las cámaras TOF representan un nuevo género de sensores de imágenes en 3D que miden por píxeles el tiempo de propagación de la luz de un emisor luminoso asignado de posiciones conocidas, y a tal efecto, el emisor luminoso y el receptor TOF deben estar sincronizados también de manera correspondiente. El tiempo de propagación de la señal se mide en un píxel TOF generalmente mediante una medición de interferencia de fases entre la señal luminosa recibida y una señal de modulación del emisor luminoso que se ha enviado al píxel como señal de referencia. En relación con el funcionamiento conocido de las cámaras TOF se remite, por ejemplo, a R. Schwarte et al., “A new active 3D-vision system based on RFmodulation interferometr y of incoherent light”, Photonics east-intelligent systems and advanced manufacturing, Proceedings of the SPIE, volumen 2588, Filadelfia, 1995.
El dispositivo conocido por el documento DE202008007078U1 no es capaz de cubrir un campo visual grande con una resolución suficiente, por ejemplo, toda la anchura de una vía de varios carriles. La invención tiene el objetivo de crear un dispositivo para la detección de vehículos en una superficie de tráfico que elimine las desventajas del estado de la técnica conocido y posibilite una detección exacta y segura tanto de vehículos en movimiento como de vehículos estacionados en una superficie de tráfico grande.
Este objetivo se consigue según la invención mediante un dispositivo con las características de la reivindicación 1.
El uso de una combinación de al menos dos cámaras TOF permite cubrir completamente, con la resolución deseada, un campo visual muy grande, por ejemplo, toda la anchura de una vía de varios carriles. Además, con los mismos componentes se pueden monitorizar, sin costes adicionales de procesamiento de imágenes, tanto el tráfico estacionado, por ejemplo, en aparcamientos situados en el campo visual de la cámara TOF, como el tráfico rodado, por ejemplo, en carriles situados en el mismo campo visual. Una anchura de detección mayor en correspondencia con la diagonal visual, por ejemplo, en dirección transversal de la vía, y simultáneamente también una longitud de detección mayor en la dirección longitudinal de la vía, se pueden conseguir porque las cámaras de tiempo de vuelo están dispuestas giradas alrededor de sus ejes visuales en cada caso respecto a la dirección de circulación de la superficie de tráfico, así como porque los campos visuales de las cámaras TOF son rectangulares y el giro se realiza en dirección de su diagonal visual; el giro impide a la vez que, por ejemplo, los cantos de un objeto en paralelo a la vía estén situados en paralelo a la trama de píxeles, siendo posible así reconocer los cantos con mayor exactitud, como se explica detalladamente más adelante.
La invención se basa en el conocimiento de que para conseguir una zona de cobertura grande, los emisores luminosos se han de disponer de manera repartida a fin de poder iluminar toda la superficie de tráfico. En este caso puede surgir el problema de que las componentes de luz de los distintos emisores luminosos se mezclen, por ejemplo, debido a los conos luminosos que se solapan o debido a los efectos de reflexión o dispersión en objetos situados en el campo visual. Sin embargo, para el correcto funcionamiento de las cámaras TOF es necesario conocer exactamente el lugar de emisión de la luz recibida. La separación de las componentes de luz de los emisores luminosos individuales posibilita una asignación exacta de la luz recibida a un punto determinado de salida de la luz.
Como es conocido en la técnica, la separación de las componentes de luz de los emisores luminosos individuales se puede conseguir de distintos modos. Así, por ejemplo, el documento US7405812B1 describe en general un procedimiento para impedir la interferencia mutua de cámaras TOF muy contiguas al modularse los emisores luminosos respectivamente con una componente de ruido adicional o al manejarse con frecuencias de modulación seudoaleatorias alternas (frecuency hopping, salto de frecuencia) . En una primera realización conveniente de la invención, los emisores luminosos emiten luz de longitudes de onda diferentes. Alternativamente, los emisores luminosos están sincronizados entre sí y con las cámaras de tiempo de vuelo y emiten luz a estas cámaras de manera alterna. Por último, los emisores luminosos pueden emitir luz de amplitud modulada con diferente patrón de modulación, preferentemente con diferentes códigos seudoaleatorios, de modo que las cámaras TOF pueden diferenciar las componentes de luz de los emisores luminosos por medio de su patrón de modulación.
Se prevé preferentemente que los campos visuales de las cámaras de tiempo de vuelo se solapen parcialmente. Esto permite detectar correctamente los objetos situados en la zona de transición entre dos cámaras TOF, por ejemplo, los vehículos que cambian de carril.
Es especialmente favorable que las cámaras TOF giradas alrededor de su eje visual se usen de manera que los campos visuales de dos cámaras de tiempo de vuelo contiguas con campos visuales rectangulares se solapen en la zona de las esquinas, siendo posible así combinar las ventajas de una anchura de cobertura ampliada con las ventajas de una detección múltiple de objetos en la zona de solapamiento.
Según otra característica preferida de la invención se prevé que el eje visual de al menos una cámara de tiempo de vuelo esté dirigido de manera inclinada desde arriba o desde el lateral hacia la superficie de tráfico en la dirección de circulación de la superficie de tráfico o contraria a ésta. Esto permite detectar antes los objetos y realizar su seguimiento en una zona más larga, aumentado la exactitud de la detección... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo (1) para la detección de vehículos (2) en una superficie de tráfico (3) , caracterizado por al menos dos cámaras de tiempo de vuelo (5) que interactúan con correspondientes emisores luminosos (6) para generar diferentes imágenes de distancia (E (t) ) de la superficie de tráfico (3) , estando conectadas las cámaras a un dispositivo de evaluación común (7) para la detección de vehículos (2) en las imágenes de distancia (E (t) ) y estando dispuestas por encima de la superficie de tráfico, estando diseñados los emisores luminosos (6) para emitir una luz diferente, detectable sólo por la cámara de tiempo de vuelo (5) correspondiente en cada caso, y presentando las cámaras de tiempo de vuelo (5) respectivamente campos visuales rectangulares (8) que están dispuestos girados alrededor de sus ejes visuales respecto a la orientación original en la que los lados más largos del campo visual rectangular están orientados en paralelo a la dirección de circulación de la superficie de tráfico.
2. Dispositivo según la reivindicación 1, caracterizado porque las cámaras de tiempo de vuelo (5) tienen ejes visuales desplazados en paralelo entre sí.
3. Dispositivo según la reivindicación 1 ó 2, caracterizado porque los campos visuales (8) de las cámaras de tiempo de vuelo (5) se solapan parcialmente.
4. Dispositivo según la reivindicación 3, caracterizado porque los campos visuales (8) de dos cámaras de tiempo de vuelo (5) contiguas con campos visuales rectangulares se solapan en la zona de las esquinas.
5. Dispositivo según una de las reivindicaciones 1 a 4, caracterizado porque el eje visual de al menos una cámara de tiempo de vuelo (5) está dirigido de manera inclinada desde arriba o desde el lateral hacia la superficie de tráfico (3) .
6. Dispositivo según una de las reivindicaciones 1 a 5, caracterizado porque al menos una cámara de tiempo de vuelo (5) está diseñada adicionalmente para generar una imagen de intensidad (I (t) ) de la superficie de tráfico (3) y porque el dispositivo de evaluación (7) está diseñado para evaluar en combinación las imágenes de distancia e intensidad (E (t) ) , I (t) ) de la superficie de tráfico (3) con el fin de detectar vehículos (2) en la superficie de tráfico (3) .
7. Dispositivo según una de las reivindicaciones 1 a 6, caracterizado porque al menos una cámara de tiempo de vuelo (5) está diseñada para grabar imágenes de distancia y, dado el caso, imágenes de intensidad (E (t) ) , (I (t) ) consecutivas, y porque el dispositivo de evaluación (7) está diseñado para reconocer nuevamente los objetos (2) detectados en imágenes consecutivas con el fin de detectar su movimiento y a partir del mismo generar parámetros de movimiento y/o señalizaciones.
8. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque el dispositivo de evaluación (7) está diseñado para determinar parámetros de movimiento de los vehículos a partir de las imágenes de distancia (E (t) ) .
9. Dispositivo según una de las reivindicaciones 1 a 8, caracterizado porque el dispositivo de evaluación (7) está diseñado para medir y/o clasificar los vehículos detectados (2) .
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden 5 excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción DE20200800078U1 [0006] US7405812B1 [0011] 10 DE202008007078U1 [0007] EP1454164A [0045] Literatura no patente citada en la descripción
R. SCHWARTE et al. A new activ.
3. vision system based on RF-modulation interferometr y of
incoherent light. Photonics east-intelligent systems and advanced manufacturing, Proceedings of the SPIE, 1995, volumen 2588 [0006]
Patentes similares o relacionadas:
Método de reconstrucción de imágenes basado en modelo, del 6 de Mayo de 2020, de ECOLE POLYTECHNIQUE FEDERALE DE LAUSANNE (EPFL): Un método de reconstrucción de imágenes de ondas de pulso que comprende: • transmitir un conjunto de ondas de pulso a un objeto […]
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Sistema y método de alerta de amenaza de láser, del 4 de Marzo de 2020, de ELBIT SYSTEMS LTD.: Un sistema de alerta de amenaza de láser, configurado para detectar la presencia de una radiación de láser transmitida por una fuente […]
Procedimiento para determinar una disposición de al menos dos sensores y red de sensores, del 2 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para determinar una disposición de al menos dos sensores entre sí, en el que se detecta un objeto en movimiento por medio de […]
Sensor para detectar y localizar fuentes de radiación láser, del 17 de Julio de 2019, de HENSOLDT Sensors GmbH: Sensor para detectar y localizar fuentes de radiación láser con - un detector sensible a la radiación dispuesto en el campo de la imagen de una óptica […]
Aparato y método para determinar elementos de referencia de un entorno, del 12 de Junio de 2019, de BALYO: Un método para determinar elementos de referencia de un entorno para asociar un mapa predeterminado con un mapa del entorno en tiempo real, comprendiendo el método […]
Procedimiento para la detección de radiación láser pulsada, así como avisador de láser productor de imágenes, del 15 de Mayo de 2019, de HENSOLDT Sensors GmbH: Procedimiento para la detección de radiación láser pulsada con resolución bidimensional de la dirección de incidencia, caracterizado […]
Conjunto de sensores ópticos, del 11 de Marzo de 2019, de HENSOLDT Sensors GmbH: Conjunto de sensores ópticos que comprende varios sensores (D1, D2) para la detección de ondas electromagnéticas y una abertura común asignada a los sensores (D1, D2), previéndose […]