Garra para capturar y transportar productos alimenticios.
Garra para capturar y transportar productos alimenticios, que comprende una pluralidad de brazos (1),
comprendiendo cada brazo (1) un extremo principal (10) y cooperando los extremos principales (10) entre sí para capturar un producto (2), quedando el producto (2) capturado por la presión ejercida entre los extremos principales (10), y estando al menos uno de los brazos (1) adaptado para pivotar con respecto a un punto de giro correspondiente para que los extremos principales (10) atrapen o aprisionen el producto (2), caracterizada porque el pivotamiento para capturar o agarrar el producto (2) se realiza mediante un fluido que actúa sobre el brazo (1) que está adaptado para pivotar, comprendiendo la garra una estructura soporte (3) a la que están unidos los brazos (1), estando el brazo (1) que está adaptado para pivotar unido a la estructura soporte (3) con posibilidad de pivotar y correspondiéndose el punto de unión entre dicho brazo (1) y la estructura soporte (3) con el punto de giro correspondiente, y una cámara (4) dispuesta sobre la estructura soporte (3) y en contacto con el extremo distal (11) de al menos el brazo (1) que está adaptado para pivotar con respecto al punto de giro correspondiente, introduciéndose el fluido en la cámara (4) para empujar al extremo distal (11) que provoca que la cámara (4) se expanda, empujando la cámara (4) el extremo distal (11) cuando se expande, provocando que el brazo (1) correspondiente pivote con respecto al punto de giro para capturar o agarrar el producto (2).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11382146.
Solicitante: Ulma Packaging Technological Center, S.Coop.
Nacionalidad solicitante: España.
Inventor/es: WEBER, MARKUS, WALTER,OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/90 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para coger o dejar los artículos o los materiales.
PDF original: ES-2428969_T3.pdf
Fragmento de la descripción:
Garra para capturar y transportar productos alimenticios SECTOR DE LA TÉCNICA
La presente invención se relaciona con garras para capturar y transportar productos alimenticios, y más concretamente con garras para capturar y transportar productos alimenticios adaptadas para ser empleadas en procesos de envasado.
ESTADO ANTERIOR DE LA TÉCNICA
En el estado de la técnica son ampliamente conocidas y empleadas garras para capturar y transportar productos de diferentes características, entre los que se incluyen por ejemplo los productos alimenticios.
Este tipo de garras comprenden una pluralidad de brazos, que se abren y/o cierran a modo de pinzas para capturar
o liberar un producto. Cada brazo comprende un extremo principal y cuando la garra se cierra para capturar un producto ambos extremos principales se acercan entre sí aprisionando entre ambos el producto. Se conocen además diferentes maneras de provocar el cierre y apertura de los brazos.
En el documento US 20040207222 A1 se divulga una garra con dos brazos, pivotando ambos brazos con respecto a un eje de giro correspondiente para abrirse o cerrarse, provocándose el giro por el desplazamiento rectilíneo de una pieza actuadora.
En el documento US 6666489 B2 se divulga una garra con dos brazos en el que uno de los brazos pivota con respecto a un eje de giro para que la garra capture o libere un producto, permaneciendo el otro brazo en una posición fija. El pivotamiento del brazo se realiza mediante un cilindro, con el desplazamiento de su vástago.
DE 3504100 C2 divulga una garra que comprende una pluralidad de brazos separados que están pivotan separados unos de otros. Se actúa sobre un elemento de expansión mediante un medio de presión, que permite la expansión de los brazos.
EXPOSICIÓN DE LA INVENCIÓN
El objeto de la invención es el de proporcionar una garra para capturar y transportar productos alimenticios, tal y como se describe en las reivindicaciones.
La garra para capturar y transportar productos alimenticios de la invención comprende una pluralidad de brazos. Cada brazo comprende un extremo principal, y todos los extremos principales cooperan entre sí para capturar un producto a modo de pinza, estando al menos uno de los brazos adaptado para pivotar con respecto a un punto de giro correspondiente para que los extremos principales capturen el producto.
El pivotado para capturar o coger el producto se realiza mediante un fluido que actúa sobre el brazo que está adaptado para pivotar. De esta manera se puede regular de una manera fácil y eficiente la presión ejercida sobre el producto por la garra, controlando la cantidad y/o la presión del fluido que actúa sobre el brazo, asegurando una correcta sujeción del producto que evite su liberación accidental y una excesiva sujeción que podría causar daños no deseados sobre el producto.
Estas y otras ventajas y características de la invención se harán evidentes a la vista de las figuras y de la descripción detallada de la invención.
DESCRIPCIÓN DE LOS DIBUJOS
La figura 1 muestra una vista en perspectiva de una primera realización de la garra de la invención.
La figura 2 muestra la garra según la realización de la figura 1, sin una cubierta y con un brazo en una posición abierta.
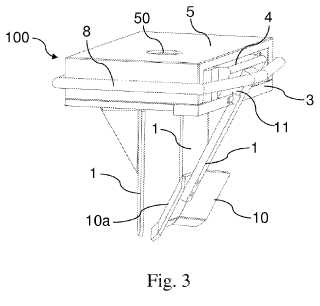
La figura 3 muestra la garra según la realización de la figura 1, sin una cubierta y con un brazo en una posición cerrada.
La figura 4 muestra una vista en perspectiva de una segunda realización de la garra de la invención.
La figura 5 muestra la garra según la realización de la figura 4, sin una tapa y con los brazos en una posición abierta.
La figura 6 muestra la garra según la realización de la figura 4, sin una tapa y con los brazos en una posición cerrada.
EXPOSICIÓN DETALLADA DE LA INVENCIÓN
En las figuras 1 a 4 se muestra una primera realización de la garra 100 para capturar y transportar productos alimenticios de la invención, que está diseñada para capturar objetos con una forma uniforme como por ejemplo salchichas. En las figuras 5 a 7 se muestra una segunda realización de la garra 100 para capturar y transportar productos alimenticios de la invención, que está diseñada para capturar objetos con una forma no uniforme, como por ejemplo alas o pechugas de pollo.
En ambas realizaciones, la garra 100 comprende una pluralidad de brazos 1 que cooperan entre sí para capturar el producto, a modo de pinzas. Cada brazo 1 comprende un extremo principal 10 y el producto es atrapado entre todos los extremos principales 10 de los brazos 1 de la garra 100, cooperando así todos los extremos principales 10 entre sí para capturar un producto. Para realizar la captura al menos uno de los brazos 1 está adaptado para pivotar con respecto a un punto de giro, provocándose que el extremo principal 10 de dicho brazo 1 se aproxime o acerque a los demás extremos principales 10 de los diferentes brazos 1, quedando así el producto atrapado o aprisionado entre dichos brazos 1.
En ambas realizaciones la garra 100 comprende unos medios de actuación para provocar, cuando se quiere capturar un producto, que un fluido empuje un extremo distal 11 opuesto al extremo principal 10 del brazo 1 (o de los brazos 1) que puede pivotar, provocando así que el brazo 1 pivote con respecto al punto de giro acercándose entre sí los extremos principales 10 de los diferentes brazos 1.
En ambas realizaciones la garra 100 comprende una estructura soporte 3 a la que están unidos los brazos 1, y una cámara 4 dispuesta sobre la estructura soporte 3 donde se introduce el fluido que empuja el extremo distal 11 de todo brazo 1 que puede pivotar, expandiéndose la cámara 4 cuando se introduce el fluido en su interior. Todo brazo 1 que puede pivotar está unido a un lateral de la estructura soporte 3 con posibilidad de pivotar, correspondiéndose el punto de unión entre dicho brazo 1 y la estructura soporte 3 con el punto de giro. El extremo principal 10 está por debajo de la estructura soporte 3 mientras que el extremo distal 11 está por encima de la estructura soporte 3. De esta manera la cámara 4 está en contacto con el extremo distal 11, y cuando debido a la introducción del fluido la cámara 4 se expande, dicha cámara 4 empuja al extremo distal 11 provocando que el brazo 1 correspondiente pivote con respecto al punto de giro.
En ambas realizaciones, la garra 100 comprende unos medios elásticos 8 para provocar que todo brazo 1 que ha pivotado debido al fluido vuelva a su posición original una vez evacuado dicho fluido de la cámara 4, y para mantener los brazos 1 en su posición original mientras no haya fluido en la cámara 4, que pueden corresponderse con una goma o un elemento equivalente por ejemplo. Los medios elásticos 8 rodean al menos parcialmente la cámara 4, y el extremo distal 11 de todo brazo 1 que puede pivotar está dispuesto entre los medios elásticos 8 y la cámara 4. Así, cuando se introduce un fluido en la cámara 4 ésta se expande y ejerce una fuerza contra el extremo distal 11 mayor que la realizada por los medios elásticos 8 provocando que el brazo 1 pivote, mientras que cuando se evacúa el fluido los medios elásticos 8 ejercen una fuerza en dirección contraria para recuperar su forma original provocando que dicho brazo 1 pivote en el sentido contrario volviendo a su posición original.
Al introducir el fluido en la cámara 4 para provocar que los brazos 1 capturen un producto, cuando uno de los brazos 1 contacta con el producto el fluido se distribuye en el interior de la cámara 4 de tal manera que cuando todos los brazos 1 contactan con el producto lo hacen ejerciendo una misma presión sobre dicho producto, proporcionándose una sujeción del producto homogénea y segura.
En la primera realización, al ser uniforme la forma del producto que se va a capturar, se pueden disponer los brazos 1 necesarios de una forma determinada que depende del producto a capturar y no es necesario que todos los brazos 1 puedan pivotar, pudiendo comprender la garra 100 únicamente un brazo 1 que puede pivotar. Los brazos 1 que no pueden pivotar están fijados a la estructura soporte 3. En la figura 2 se muestra la primera realización de la garra 100 con dicho brazo 1 en una posición abierta donde no ha pivotado, y en la figura 3 se muestra la primera realización de la garra 100 con el brazo 1 en una posición cerrada donde ha pivotado para capturar un producto. Además, para ayudar a capturar el producto, el extremo principal 10 de al menos uno de los brazos 1 puede comprender una forma adecuada para que el producto quede correctamente sujeto por los brazos 1, forma que depende del producto a capturar, comprendiendo así dicho extremo principal 10 una... [Seguir leyendo]
Reivindicaciones:
1. Garra para capturar y transportar productos alimenticios, que comprende una pluralidad de brazos (1) , comprendiendo cada brazo (1) un extremo principal (10) y cooperando los extremos principales (10) entre sí para capturar un producto (2) , quedando el producto (2) capturado por la presión ejercida entre los extremos principales (10) , y estando al menos uno de los brazos (1) adaptado para pivotar con respecto a un punto de giro correspondiente para que los extremos principales (10) atrapen o aprisionen el producto (2) , caracterizada porque el pivotamiento para capturar o agarrar el producto (2) se realiza mediante un fluido que actúa sobre el brazo (1) que está adaptado para pivotar, comprendiendo la garra una estructura soporte (3) a la que están unidos los brazos (1) , estando el brazo (1) que está adaptado para pivotar unido a la estructura soporte (3) con posibilidad de pivotar y correspondiéndose el punto de unión entre dicho brazo (1) y la estructura soporte (3) con el punto de giro correspondiente, y una cámara (4) dispuesta sobre la estructura soporte (3) y en contacto con el extremo distal (11) de al menos el brazo (1) que está adaptado para pivotar con respecto al punto de giro correspondiente, introduciéndose el fluido en la cámara (4) para empujar al extremo distal (11) que provoca que la cámara (4) se expanda, empujando la cámara (4) el extremo distal (11) cuando se expande, provocando que el brazo (1) correspondiente pivote con respecto al punto de giro para capturar o agarrar el producto (2) .
2. Garra según la reivindicación 1, que comprende unos medios elásticos (8) para provocar el pivotamiento del brazo (1) a su posición original una vez se evacúa el fluido de la cámara (4) y para mantener el brazo (1) en su posición original la ausencia de fluido en la cámara (4) , cubriendo los medios elásticos (8) el extremo distal (11) de al menos el brazo (1) adaptado para pivotar, estando dicho extremo distal (11) dispuesto entre los medios elásticos (8) y la cámara (4) .
3. Garra según las reivindicaciones 1 o 2, en donde la cámara (4) se extiende por todo el perímetro de la estructura soporte (3) .
4. Garra según cualquiera de las reivindicaciones 1 a 3, en donde la cámara (4) es sustancialmente circular.
5. Garra según la cualquiera de la reivindicaciones 1 a 4, que comprende una tapa (5) fijada a la estructura soporte (3) , estando la cámara (4) dispuesta y delimitada entre la estructura soporte (3) y la tapa (4) .
6. Garra según la reivindicación 5, en donde la cámara (4) comprende una válvula a través de la cual se introduce o evacúa el fluido en su interior, la tapa (5) comprende un orificio pasante (50) , y los medios de actuación comprenden un conducto que atraviesa el orificio pasante (50) de la tapa (5) y que está conectado a la válvula, introduciéndose el fluido hasta la cámara a través del conducto (7) y la válvula.
7. Garra según las reivindicaciones 5 o 6, en donde la tapa (5) comprende un alojamiento en una superficie enfrentada a la estructura soporte (3) para alojar la cámara (4) .
8. Garra según las reivindicaciones 5 o 6, en donde la estructura soporte (3) comprende un alojamiento en una superficie enfrentada a la tapa (5) para alojar la cámara (4) .
9. Garra según cualquiera de las reivindicaciones 5 a 8, en donde la tapa (5) cubre la cámara (4) y comprende una ventana (51) a través de la cual se puede expandir la cámara (4) cuando se introduce fluido en su interior.
10. Garra según cualquiera de las reivindicaciones anteriores, en donde el extremo principal (10) del brazo (1) que puede pivotar es flexible y comprende una superficie de contacto (10a) con el producto mayor que el resto de extremos principales (10) .
11. Garra según cualquiera de las reivindicaciones 1 a 8, en donde todos los brazos (1) están adaptados para pivotar con respecto a un punto de giro correspondiente.
12. Garra según cualquiera de las reivindicaciones anteriores, en donde el fluido es aire a presión.
FIG. 1
FIG. 2 FIG. 3
FIG. 4 FIG. 5
FIG. 6
Patentes similares o relacionadas:
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Estación automática para recoger artículos y procedimientos relacionados para usar, del 26 de Febrero de 2020, de CT PACK S.R.L.: Una estación automática para recoger artículos (A) que comprende: - un sistema de movimiento que comprende un transportador que define una superficie […]
Mecanismo de suministro de boquilla de vertido y máquina de sellado de boquilla de vertido, del 12 de Febrero de 2020, de TOYO JIDOKI CO., LTD.: Un mecanismo de suministro de boquilla de vertido que comprende: un dispositivo de retención de boquilla de vertido para retener […]
Dispositivo para recoger y depositar selectivamente artículos en un almacén automático, del 12 de Febrero de 2020, de Modula S.p.A: Dispositivo para recoger y depositar selectivamente artículos, destinado a un almacén automático que comprende: un plano de soporte para el soporte temporal […]
Sistemas y métodos de transportador mecánico y envasado de alimentos, del 8 de Enero de 2020, de INTERCONTINENTAL GREAT BRANDS LLC: Un aparato de envasado de productos alimenticios que comprende: un transportador mecánico corriente arriba que transporta artículos […]
Dispositivo y método para transferir envases, del 23 de Octubre de 2019, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Dispositivo de transferencia para transferir envases de un dispositivo de avance de envases, en el que están alineados en al […]
DISPOSITIVO PARA RECOGER Y DESPRENDER MEDIOS ÓPTICOS, del 11 de Septiembre de 2019, de GLIFSTOCK, S.L: Dispositivo para recoger y desprender medios ópticos (Cds, DVDs y Blu-Rays), el cual se ha realizado en orden a obtener mayor facilidad y abaratar el posible mantenimiento […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]