Procedimiento e instalación para caracterizar el patrón de apoyo de un sujeto.
La presente invención consiste en un procedimiento e instalación para caracterizar el patrón de apoyo de un sujeto que realiza movimientos de carrera,
estando el sujeto instrumentado con dos marcas fiduciales, una en el talón del calzado y la otra en la parte posterior de la pierna. Un ordenador recibe y analiza los movimientos del tobillo del sujeto en las tres dimensiones, partiendo de una secuencia de imágenes adquiridas por una cámara de video digital, dando como resultado la clasificación del sujeto al comparar las curvas de los ángulos del tobillo del sujeto con la de sujetos corredores pronadores, neutros y supinadores almacenadas en una base de datos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201330204.
Solicitante: ASOCIACION INSTITUTO DE BIOMECANICA DE VALENCIA.
Nacionalidad solicitante: España.
Inventor/es: MONTERO VILELA, JOSE, MORAGA MAESTRE, RAMON, GONZALEZ GARCIA,JUAN CARLOS, Olaso Melis,José, NAVARRO GARCIA,José, PARRILLA BERNABÉ,Eduardo, MEDINA RIPOLL,Enrique, PARRA GONZÁLEZ,Francisco.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/11 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › Medida del movimiento del cuerpo entero o de partes del mismo, p. ej. temblor de la cabeza o de las manos, movilidad de un miembro (para medida del pulso A61B 5/02).
Fragmento de la descripción:
Procedimiento e instalación para caracterizar el patrón de apoyo de un sujeto
OBJETO DE LA INVENCION
La presente invención se refiere a un procedimiento para la caracterización de un sujeto, según su patrón de apoyo, en supinador, neutro o pronador.
El procedimiento está basado en el análisis cinemático en las tres dimensiones del movimiento articular del tobillo del sujeto, cuando este último realiza movimientos de carrera, y su comparación con patrones de apoyos previamente clasificados de sujetos supinadores, neutros y pronadores.
Es también objeto de la presente invención, una instalación para llevar a cabo dicho procedimiento de caracterización.
ANTECEDENTES DE LA INVENCION
Como se conoce, la correcta selección del calzado para la práctica de un deporte es determinante para reducir el riesgo de lesión. Por tal razón, en mucho de los lugares de venta de calzado, se brindan servicios de asesoramiento para la elección del calzado adecuado, basados en estudios biomecánicos.
Actualmente, existen procedimientos sencillos de clasificación de los sujetos que consisten en estudiar, ya sea, el pie del sujeto (estático, caminando o corriendo) , el desgaste del calzado, la huella plantar, o basados en sistemas de medidas.
Por ejemplo, el documento de patente US 2006213090, publicado el 28 de septiembre de 2006, da a conocer un procedimiento de clasificación de un pie, que comprende los siguientes pasos:
- visualizar el pie,
- evaluar una pluralidad de características en dicho pie, y
- clasificar dicho pie en un tipo de pie, en donde, la clasificación es basada en la visualización de dicho pie y en la evaluación de la pluralidad de características exhibidas por dicho pie.
Se ha comprobado que estos procedimientos conocidos son pocos fiables pues dependen mayoritariamente del criterio y experiencia de la persona que lleva a cabo el procedimiento. En muchas ocasiones, dependientes o encargados del lugar de venta de calzado sin la formación adecuada.
Estudios realizados demuestran que un elevado porcentaje de los corredores que se autoproclaman como pronadores no muestran rasgos excesivos de eversión durante la carrera, en cambio, otros dados como normales o neutros, presentan una eversión excesiva cuando efectúan una carrera.
Esto demuestra que la percepción personal y el rango de eversión pueden responder a fenómenos distintos. Es decir, la clasificación personal puede responder a criterios que no son lo suficientemente robustos.
En cuanto al análisis o evaluación del tipo de pie estando el sujeto parado, en muchas ocasiones, un pie en posición estática puede comportarse de manera distinta a cuando está en movimiento al desplazarse durante una carrera.
En algunos casos, unos pies que se muestran normales en posición estática pueden comportarse como pies planos durante la carrera, de igual manera, unos pies cavos en posición estática, pueden comportarse como pies normales, e incluso, como pies planos durante la carrera.
De igual manera, la huella plantar nos ofrece una visión incompleta de lo que puede esperarse del mismo pie en movimiento.
Por tanto, la valoración de los pies de un atleta debe realizarse en movimiento, imprescindible, si se pretende recomendar un tipo de calzado para correr.
Otro aspecto importante, es valorar los tres ejes de giro de la articulación del tobillo. La correcta clasificación del sujeto como pronador, neutro o supinador depende del análisis del giro combinado en los tres ejes.
Una clasificación del patrón de apoyo de un sujeto basado solo en la valoración del ángulo proyectado en el plano antero-posterior, es decir, el plano frontal del pie, no sería una clasificación del todo correcta, pues, en primer lugar, el ángulo proyectado sobre el plano antero-posterior varía en gran medida por un aumento de la flexo-extensión del tobillo durante la rotación de la pierna del sujeto.
En segundo lugar, la alta dependencia funcional de las articulaciones que componen el tobillo y la dirección de los ejes de movimiento de las mismas hace muy complicado aislar los distintos movimientos que desarrolla el pie. Un movimiento de flexión-extensión, implica movimientos de eversión/inversión y de abducción/aducción. Por ejemplo, un movimiento de un pie tipo pronador, es la suma de movimientos de flexión dorsal, abducción y eversión; y un movimiento de un pie tipo supinador, conlleva sumar movimientos de flexión plantar, aducción e inversión.
Existen sistemas diseñados para el análisis en tres dimensiones de la cinemática articular basados en el análisis de imágenes que requieren el empleo de al menos dos cámaras, utilizando marcadores puntuales, activos o pasivos, situados en diferentes puntos de cada uno de los segmentos corporales a medir en el sujeto, mientras este camina o desarrolla una carrera.
Por ejemplo, el documento de patente US 4631676, publicado el 23 de diciembre de 1986, divulga un sistema para el análisis de marcha o movimiento de una porción del cuerpo de un sujeto que comprende marcadores reflectantes adjuntados al sujeto, dichos marcadores están formados por cintas reflectantes y son relativamente pequeños y ligeros que no impiden al sujeto efectuar sus movimientos con normalidad.
El sistema también comprende un par de medios de grabación de video para visionar y grabar en video los movimientos del sujeto durante un predeterminado periodo de tiempo. Los medios de grabación de video están conectados a un ordenador, el cual recibe plano a plano las vistas de los movimientos del sujeto, en donde son apreciados los marcadores reflectantes. El ordenador incluye medios de análisis de video para digitalizar cada plano del video grabado localizando, mediante coordenadas X, Y y Z, el centro de cada marcador, las cuales son analizadas por el ordenador dando como salida una figura de líneas o palos que describe los movimientos del sujeto objeto de estudio.
El documento de patente US 4813436, publicado el 21 de marzo de 1989, describe un sistema de análisis de movimiento que comprende marcadores fijados a distintas articulaciones del cuerpo de un sujeto, así como, calzando zapatos o plantillas sensibles a la presión.
El sujeto es puesto a caminar o correr y mientras lo hace, su movimiento es captado por dos cámaras de video. La señal de video de dichas cámaras es almacenada por medios de grabación de video y luego se digitaliza.
Los zapatos o plantillas sensibles a la presión proporcionan señales que son procesadas para convertir la señal analógica a digital y es mostrada, en una pantalla, la presión aplicada al pie del paciente mientras camina o corre.
Las señales captadas por las cámaras, que fueron digitalizadas, se presentan en diversas pantallas que muestran el modo de andar del sujeto, la posición angular de sus articulaciones e información indicativa de las características particulares de la marcha del sujeto. Los datos producidos y procesados por el sistema permiten evaluar la marcha del sujeto en comparación con un sujeto normal.
Por su parte, el documento de patente US 2007275830, publicado el 29 de noviembre de 2007, muestra un sistema de entrenamiento de la marcha mediante el análisis de movimiento de un sujeto que marcha sobre un tapiz rodante.
El sistema incluye un tapiz rodante cuya velocidad de rotación de sus rodillos es ajustable en respuesta a la velocidad de marcha del sujeto, y unos medios de medición, fijados al cuerpo del sujeto, transfieren las señales asociadas con un movimiento del cuerpo del sujeto a una unidad de control. Dicha unidad de control analiza los movimientos del sujeto, basados en los datos transferidos por los medios de medición, y una unidad de visualización, muestra los datos al sujeto.
Aun cuando, en estas soluciones conocidas, se tienen en cuenta los movimientos de giro que desarrolla la articulación en los tres ejes, la valoración sigue siendo basada en el criterio y la experiencia de la persona que lleva a cabo el procedimiento de clasificación.
Además, el empleo de más de dos cámaras para lograr captar los movimientos que desarrolla la articulación en los tres ejes mientras el sujeto lleva a cabo una carrera, requiere disponer de un gran espacio para llevar a cabo el procedimiento de clasificación. Sin embargo, en la mayoría de los casos, los establecimientos de venta de calzado cuentan con espacios muy reducidos.
Entonces, se requiere diseñar un procedimiento e instalación para caracterizar el patrón de apoyo de un sujeto de manera automática, es decir, que no dependa del criterio y la experiencia de la persona que lleva a cabo dicho procedimiento; así...
Reivindicaciones:
1. Procedimiento para caracterizar el patrón de apoyo de un sujeto (1) que comprende los siguientes pasos:
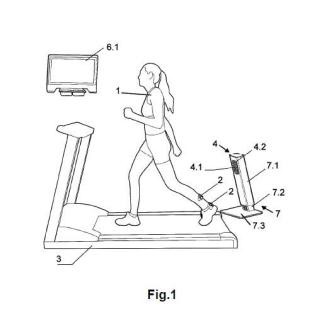
a) instrumentar al sujeto (1) con dos marcas fiduciales (2) , en el talón del calzado y en la parte posterior de la pierna del sujeto (1) respectivamente, b) realizar movimientos de carrera, por parte del sujeto (1) , sobre una zona de medición (3) , c) captar los movimientos de carrera por medio de una cámara de video digital (4.1) de un módulo de registro (4) , d) adquirir secuencia de imágenes para al menos un número de apoyos del sujeto (1) mayor que un mínimo de números de apoyos previamente establecido, e) almacenar las imágenes en un fichero de video de la secuencia de carrera, f) segmentar por imagen el fichero de video de la secuencia de carrera, g) detectar e identificar el punto característico del centro de cada marca fiducial (2) en cada imagen segmentada, h) registrar la posición, en coordenadas de pantalla, de cada centro de marca fiducial (2) en cada imagen segmentada,
i) calcular la posición y orientación espacial de cada centro de marca fiducial (2) en cada imagen segmentada, a partir de la reconstrucción en tres dimensiones de las coordenadas de pantalla de cada centro de marca fiducial (2) ,
j) identificar, en base a la posición absoluta y relativa de su centro, la marca fiducial (2) que corresponde al
talón del calzado y la que corresponde a la pierna del sujeto (1) , k) obtener las variables cinemáticas de los centros de las marcas fiduciales (2) en cada imagen segmentada, l) obtener unas curvas representativas de los ángulos de rotación, flexión/extensión e inversión/eversión de la articulación del tobillo para cada apoyo del sujeto (1) , cuyos valores responden a las variables cinemáticas de los centros de las marcas fiduciales (2) obtenidas en el paso k) , m) segmentar y normalizar en el tiempo los valores de las curvas obtenidas en el paso l) para cada apoyo del sujeto (1) ,
n) puntuar la media de los valores de las curvas segmentadas y normalizadas en el paso m) en función de un grupo de componentes principales observadas previamente en una muestra de sujetos (1) pronadores, neutros y supinadores,
o) aplicar unas ecuaciones de clasificación a las puntuaciones obtenidas en el punto n) para identificar el grupo al que pertenece el sujeto (1) , y p) visualizar, en una pantalla (6.1) de un módulo de salida de la información (6) , los resultados sobre la clasificación del patrón de apoyo correspondiente al sujeto (1)
2. Procedimiento según la reivindicación 1 en el que la zona de medición (3) donde se realiza el paso b) es un tapiz rodante.
3. Procedimiento según la reivindicación 2 en el que antes del paso d) se detecta una carrera de cadencia estable.
4. Procedimiento según la reivindicación 1 en el que la zona de medición (3) donde se realiza el paso b) es un pasillo acondicionado para que el sujeto (1) realizase movimientos de carrera.
5. Procedimiento según la reivindicación 1 en el que el mínimo de número de apoyos previamente establecido para el paso d) son tres apoyos.
6. Procedimiento según las reivindicaciones 4 y 5 en el que los pasos c) y d) se repiten mientras que el número de apoyos realizados por el sujeto (1) sea menor que el mínimo de número de apoyos previamente establecido.
7. Procedimiento según las reivindicaciones 4 y 5 en el que los pasos c) y d) se repiten mientras que el número de apoyos realizados por el sujeto (1) sea mayor o igual al mínimo de número de apoyos y menor que un máximo de número de apoyos previamente establecidos, siempre que la desviación estándar de las clasificaciones de la muestra de apoyos realizados por el sujeto (1) sea mayor que un máximo de desviación estándar previamente establecido.
8. Procedimiento según la reivindicación 7 en el que el máximo de número de apoyos previamente establecido es de seis apoyos.
9. Procedimiento según la reivindicación 7 en el que el máximo de desviación estándar previamente establecido es de 0’8.
10. Procedimiento según la reivindicación 1 en el que el paso k) incluye las siguientes acciones:
- calcular las coordenadas espaciales (X, Y, Z) del centro de cada marca fiducial (2) respecto a un sistema de referencia absoluto,
- calcular los ángulos absolutos (Α, Β, Γ) del centro de cada marca fiducial (2) con respecto al sistema de referencia absoluto, y
- calcular los ángulos relativos (α, β, γ) del centro de la marca fiducial (2) de la pierna del sujeto (1) con respecto a las del centro de la marca fiducial (2) del talón del calzado.
11. Procedimiento según la reivindicación 1 en el que el paso (m) incluye las siguientes etapas:
- identificar el inicio de cada apoyo del sujeto (1) ,
- identificar el intervalo de apoyo total del pie del sujeto (1) ,
- identificar el final del apoyo del sujeto (1) ,
- eliminar los valores anteriores al inicio del apoyo y los posteriores al final del apoyo, e
- interpolar los valores comprendidos entre el inicio y final del apoyo de forma que queden 100 valores.
12. Procedimiento según la reivindicación 1 en el que el grupo de componentes principales empleado en el paso n) es obtenido mediante un análisis de componentes principales funcional (ACPF) de una muestra de curvas representativas de los ángulos de rotación, flexión/extensión e inversión/eversión de la articulación del tobillo de sujetos (1) pronadores, neutros y supinadores.
13. Procedimiento según la reivindicación 12 en el que para cada sujeto (1) se obtienen un vector de puntuaciones que se relacionan con la manera individual de ejecutar sus movimientos.
14. Procedimiento según las reivindicaciones 1 y 13 en el que las ecuaciones de clasificación del paso o) se obtienen mediante un análisis discriminante que comprende, como factor de clasificación, el diagnostico de un experto, y como variables predictivas, los vectores de puntuaciones obtenidos para los sujetos (1) pronadores, neutros y supinadores.
15. Procedimiento según la reivindicación 1 en el que las puntuaciones del paso n) se realizan sobre la media de un mínimo de tres valores.
16. Procedimiento según cualquiera de las reivindicaciones anteriores en el que antes del paso a) se lleva a cabo un ajuste de la posición de la cámara de video digital (4.1) del módulo de registro (4) con respecto a la zona de medición (3) , el ajuste comprende los siguientes pasos:
- ajustar en altura la cámara de video digital (4.1) del módulo de registro (4) según sea el tipo de zona de medición (3) , un tapiz rodante o un pasillo,
- situar una plantilla de centrado (12) sobre la zona de medición (3) ,
- reconocer unas marcas de centrado (12.1) de la plantilla de centrado (12) , visualizadas en la pantalla (6.1) del módulo de salida de información (6) ,
- reconocer unas marcas de referencia (6.11) vistas inmóviles en la pantalla (6.1) del módulo de salida de información (6) , y
- ajustar la posición de la cámara de video digital (4.1) , haciendo coincidir las marcas de centrado (12.1) de la plantilla de centrado (12) con las marcas de referencia (6.11) vistas inmóviles en la pantalla (6.1) del módulo de salida de información (6) .
17. Instalación para llevar a cabo el procedimiento de las reivindicaciones anteriores que comprende unas marcas fiduciales (2) instrumentadas sobre un sujeto (1) que realiza movimientos de carrera sobre una zona de medición (3) , un módulo de registro (4) que comprende a su vez una cámara de video digital (4.1) que capta los movimientos de carrera del sujeto (1) , un ordenador (5) conectado a dicha cámara de video digital (4.1) que recibe y analiza una secuencia de imágenes, captadas por la cámara de video digital (4.1) , de los movimientos de carrera que desarrolla el sujeto (1) sobre la zona de medición (3) , y un módulo de salida de información (6) que actúa conjuntamente con el ordenador (5) , caracterizado por que el módulo de registro (4) está soportado por una columna inclinada (7) dispuesta hacia la zona de medición (3) , el módulo de registro (4) comprende una fuente de leds (4.2) de luz blanca con control estroboscópico que maximiza el nivel de iluminación de la zona de medición (3) , los ejes ópticos de la cámara de video digital (4.1) y de la fuente de leds (4.2) son coaxiales entre sí y están orientados, hacia la zona de medición (3) , de forma perpendicular a la columna inclinada (7) .
18. Instalación según la reivindicación 10 en el que la zona de medición (3) es un tapiz rodante.
19. Instalación según la reivindicación 10 en el que la zona de medición (3) es un pasillo acondicionado para que el sujeto (1) realizase movimientos de carrera.
20. Instalación según las reivindicaciones 18 ó 19 en el que la columna inclinada (7) conforma un ángulo de 74º ± 2º con respecto al plano horizontal.
21. Instalación según las reivindicaciones 18, 19 ó 20 en el que la columna inclinada (7) es telescópica,
comprendiendo un elemento telescópico superior (7.1) y un elemento telescópico inferior (7.2) dispuestos sobre una base (7.3) , en donde, la altura de dicha columna inclinada (7) es ajustada según el tipo de zona de medición (3) .
22. Instalación según la reivindicación 21 en el que la cámara de video digital (4.1) y la fuente de leds (4.2) están 10 dispuestas en el extremo superior del elemento telescópico superior (7.1) de la columna inclinada (7) .
23. Instalación según las reivindicaciones 18 y 22 en el que la cámara de video digital (4.1) está situada a 50 cm ± 5 cm de la superficie superior del tapiz rodante.
1.
24. Instalación según las reivindicaciones 19 y 22 en el que la cámara de video digital (4.1) está situada a 50 cm del suelo.
25. Instalación según la reivindicación 1 en el que el módulo de salida de información (6) incluye una pantalla (6.1) .
Patentes similares o relacionadas:
PROCEDIMIENTO Y DISPOSITIVO DE REGISTRO AUTOMÁTICO DE LA LOCOMOCIÓN DE NEMATODOS U ORGANISMOS PEQUEÑOS DE TAMAÑOS SIMILARES POR INTERFEROMETRÍA TEMPORAL DE MICROHACES DE LUZ, del 23 de Julio de 2020, de PHYLUMTECH S.A: Procedimiento y dispositivo de registro automático de la locomoción de nematodos u organismos pequeños de tamaños similares por interferometría temporal de microhaces […]
DISPOSITIVO PARA EVITAR EPISODIOS DE APNEA EN INFANTES, del 11 de Junio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Dispositivo para evitar episodios de apnea en infantes, que simula un patrón de respiración adecuado para sincronizar la respiración del infante y que […]
Control electrofisiológico de contracciones uterinas, del 10 de Junio de 2020, de Nemo Healthcare B.V: Un dispositivo de procesamiento de señales para procesar señales electrofisiológicas relacionadas con contracciones uterinas de una mujer […]
Estímulo terapéutico mejorado para un sistema de entrañado de succión no nutritiva, del 10 de Junio de 2020, de Innara Health, Inc: Un sistema de procesamiento codificado con una aplicación para estimular un CPG y un nervio trigémino en un cerebro humano, influyendo […]
Aparato y método para la evaluación automática del transcurso de una sesión de entrenamiento, del 3 de Junio de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para la valoración automática de un transcurso de un ejercicio de entrenamiento, que comprende: proporcionar una pluralidad de informaciones […]
 Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Procedimiento y aparato para determinar información indicativa de disfunciones cardíacas, del 29 de Abril de 2020, de Precordior Oy: Un aparato que comprende:
- una interfaz de señal para recibir una primera señal indicativa de movimiento cardiovascular y medida con un elemento […]
Sistema y método para determinar el sueño y las fases de sueño de una persona, del 22 de Abril de 2020, de V-Watch SA: Un sistema para determinar la transición de fase de sueño de una persona, el sistema que comprende: medios de detección de la frecuencia cardíaca […]
Sistema para restaurar la función muscular de la columna lumbar, del 25 de Marzo de 2020, de Mainstay Medical Limited: Un sistema para recuperar la función muscular de la columna lumbar, el sistema que comprende: uno o más electrodos configurados […]