Asa para controlar un dispositivo de elevación.
Un dispositivo para medir las fuerzas aplicadas por un operador a un dispositivo de control (C) para accionarun dispositivo de elevaci6n,
dispositivo de medici6n que comprende una parte de asa merlin (L), que el operadorpuede manipular, y una unidad de control (H) que, mediante una unidad impulsora (A), realiza el accionamientovertical, caracterizado porque la parte de asa mOvil (L) esta conectada mecanicamente a una membrana (R) queencierra a una cavidad (P) en el dispositivo de control, cavidad que esta conectada a un sensor de presi6n (F), siendola semi del sensor de presi6n usada por dicha unidad de control (H) para ajustar el movimiento vertical del dispositivode elevacion.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2006/050323.
Solicitante: Air Handle e-p AB.
Nacionalidad solicitante: Suecia.
Dirección: Cederalsvägen 6D 186 40 Vallentuna SUECIA.
Inventor/es: OLSSON,JOHAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/56 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Instalaciones de mando o pedales.
- B66D3/18 B66 […] › B66D CABRESTANTES; CABRIAS; APAREJOS, p. ej. POLIPASTOS; TROCOLAS (enrollado y desenrollado de cables con fines de alimentación o almacenado B65H; mecanismos de enrollado o desenrollado de cables para ascensores B66B; dispositivos de elevación especialmente adaptados a los andamios suspendidos E04G 3/32). › B66D 3/00 Aparatos de elevación o de tracción portátiles o móviles. › Polipastos de motor.
PDF original: ES-2408312_T3.pdf
Fragmento de la descripción:
Asa para controlar un dispositivo de elevación.
La presente invención se refiere a un nuevo tipo de dispositivo para medir las fuerzas aplicadas por el operador a un asa de control para controlar diferentes tipos de dispositivos de elevación.
Dicho dispositivo se conoce del documento US2003/189197.
TÉCNICA ANTERIOR
Ya se sabe que, midiendo la fuerza vertical que está siendo aplicada sobre un asa de control por el operador, puede obtenerse un control eficaz del dispositivo de elevación. Por ejemplo el documento SE 453589 desvela que dos elementos piezoeléctricos se disponen para medir movimientos hacia arriba y hacia abajo, respectivamente, con una envuelta externa sobre el asa de control, envuelta que constituye la propia asa. En este caso, una solución rentable se obtiene con dos señales de salida eléctricas, que son proporcionales a la fuerza hacia arriba y hacia abajo, respectivamente, aplicada por el operador.
En el documento US 4.917.360 se muestra una solución, que en principio está construida como el documento SE 453 598 pero donde la medición de la fuerza se realiza mediante un muelle de retomo cuyo objetivo es siempre mantener a la envuelta externa en una "posición inicial", y el desplazamiento mecánico se mide mediante una hor
quilla de lectura óptica. Esta metodología con un sistema mecánico en forma de un muelle para volver al inicio y un sistema diferente para medición siempre plantea grandes requisitos de precisión con ambos sistemas, dado que las dos "posiciones iniciales" de los sistemas tienen que coincidir de forma exacta.
El documento US 3.998.432 muestra un concepto completamente neumático, donde los movimientos hacia arriba y hacia abajo son generados por una válvula, que está integrada en la parte del asa. La envuelta externa que constituye el asa actuará sobre una corredera, que determina si el cilindro de elevación integrado se llenará o se vaciará de aire. Sin embargo, el concepto tiene inconvenientes, como por ejemplo que la optimización de las características de control solamente puede realizarse mediante modificaciones mecánicas y, dado que tanto dicha corredera como el
cilindro de elevación siempre tienen una fricción no deseada en las juntas incluidas -lo que afecta negativamente al rendimiento total del dispositivo de elevación.
DIVULGACiÓN DE LA INVENCiÓN
El objeto de la invención es proporcionar una solución rentable para aSa de control para dispositivos de elevación, que resista entornos industriales duros con un mlnimo de mantenimiento y calibrado. Dicho objeto se consigue usando un tipo comparativamente nuevo de sensores de presión que, con gran precisión, consiguen medir presiones que se desvlan de la presión atmosférica del orden de tl0 kPa. A través del uso industrial y médico, este tipo de sensores tiene una relación entre precio y rendimiento, que les hace muy útiles en dicho contexto. El sensor está conectado a una cavidad en el aSa de control, que está constituida parcialmente por una membrana elástica que, a su vez, está conectada a la parte de asa del asa de control de tal manera que, cuando se aplica una fuerza vertical al asa de control, una desviación de presión en la cavidad que está en proporción a la fuerza. La desviación de presión medida por el sensor es leida por una unidad de control, que a su vez controla el dispositivo impulsor que reali
za la propia operación de elevación. Entonces se obtienen una serie de ventajas en comparación con otras técnicas conocidas.
1. Zona muerta muy pequeña. La fuerza medible más baja es muy pequeña, dado que el diseño como tal permite una fricción muy baja en la parte móvil.
2. Fácil de cambiar a escala la relación fuerza/señal modificando la región eficaz de la membrana.
3. Fácil de modificar la rigidez del aSa de control. Alterando el volumen de la cavidad, la longitud del recorrido para cierta fuerza puede modificarse, que puede ser un parámetro importante cuando debe optimizarse el rendimiento de todo el equipo de elevación.
4. Sin "calibrado a cero". Permitiendo que se produzca cierta fuga de la cavidad, el propio sistema tarará el peso de la parte de agarre móvil. Por supuesto, la fuga tiene que ser muy pequeña y al mismo tiempo compensará las
desviaciones de presión que se derivan de variaciones de la temperatura del entorno.
5. Protección sencilla contra ultraje. Una región de medición del orden de ti N es deseable para este tipo de dispositivos de elevación. En un entorno industrial, debe tenerse, sin embargo, en consideración que la parte del asa estará sometida a fuerzas del orden de 1000 N. Normalmente, el tipo de sensor de presión que se usa en es
te caso para la medición de la fuerza resiste una región de presión x 2 sin daños pennanentes. Por lo tanto, esto 2 O
O
presenta una posibilidad sencilla de introducir una limitación mecánica de la posición del extremo, que sin gran
des requisitos en cuanto a precisión detiene el movimiento del asa el algún punto entre el 100 Y el 200% de la región de movimiento determinada.
Existen ciertas aplicaciones en las que la posibilidad de evitar completamente una conexión eléctrica entre el asa de control y la unidad de control es especialmente ventajosa. Un ejemplo es cuando existen entornos eléctricos extre
mos, tales como la presencia de electricidad estática, donde un asa de control eléctrica puede resultar afectada de manera no deseable. Un ejemplo adicional es la industria alimentaria, donde el asa de control esta sometida regularmente a tensiones graves en forma de lavado a alta presión, agua caliente, etc. Otro ejemplo más son entornos explosivos, donde el uso de componentes electrónicos siempre es un problema. En todos estos ejemplos, es clara
mente más dificil y más caro manejar componentes electrónicos sensibles en el asa de control y cableado de conexión multipolar entre la función del asa de control de forma satisfactoria que un asa de control de acuerdo con la invención con una manguera helicoidal entre el asa de control y los medios de control.
De forma bastante independiente de la aplicación, el cableado multipolar entre el asa de control y la unidad de con
trol con medios de contacto asociados en ambos extremos (que es la solución predominante) es una razón muy
común para paradas con dichos tipos de dispositivos de elevación. Una manguera helicoidal es, por lo tanto, como tal una ventaja, dado que es más insensible, robusta y barata.
En muchas aplicaciones, es deseable permitir que el dispositivo de agarre y el asa de control giren libremente con respecto a la unidad impulsora, por ejemplo cuando la secuencia de funcionamiento implica que el operador se mueve alrededor en la misma dirección, vuelta tras vuelta. La situación descrita anteriormente con un cableado mul
tipolar entre la unidad de control y el asa de control puede usarse solamente, por lo tanto, si un medio pivotante multipolar (o colector de corriente) está montado sobre el cableado en algún punto entre el asa de control y la unidad impulsora. Dicha solución es tanto cara como un claro inconveniente en cuanto a fiabilidad. El dispositivo de la in
vención solamente necesita un pivote neumático para obtener un asa de control que gira libremente, lo cual es menos caro así como más fiable.
Otras ventajas de la invención serán evidentes a partir de la siguiente descripción de realizaciones.
DESCRIPCiÓN DE LOS DIBUJOS
La descripción de realizaciones se realiza en referencia a los dibujos, en los que:
La figura 1 muestra las partes de un dispositivo de elevación convencional,
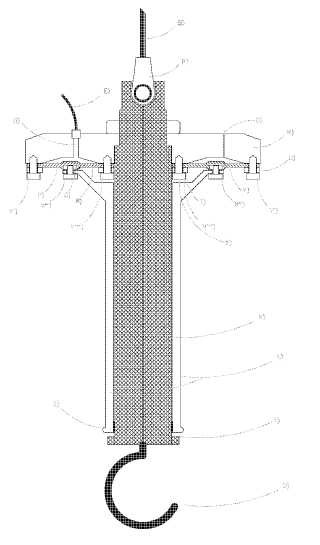
La figura 2 muestra una sección transversal de un diseño circular del asa de control de acuerdo con la invención,
La figura 3 muestra cómo resulta afectada el asa de control por la fuerza hacia arriba aplicada por el operador,
La figura 4 muestra cómo resulta afectada el asa de control por la fuerza hacia abajo aplicada por el operador,
DESCRIPCiÓN DE REALIZACIONES
En la figura 1, se muestra un dispositivo de elevación tipico con sus partes esenciales. Una unidad impulsora (A) está dispuesta para elevar el asa de control (C) y el dispositivo de agarre (D) por medio de un cable (B) . La unidad impulsora (A) puede ser, por ejemplo, un motor eléctrico con un tambor de cable o un cilindro neumático con el propósito de suministrar la fuerza de elevación. La unidad impulsora (A) está controlada por una unidad de control (H) , que mediante la conexión (E) y el sensor de presión (F) está provista de información sobre las fuerzas del operador que influyen en el asa de control (C) .
... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo para medir las fuerzas aplicadas por un operador a un dispositivo de control (e) para accionar un dispositivo de elevación, dispositivo de medición que comprende una parte de asa móvil (L) , que el operador
puede manipular, y una unidad de control (H) que, mediante una unidad impulsora (A) , realiza el accionamiento vertical, caracterizado porque la parte de asa móvil (L) está conectada mecánicamente a una membrana (R) que encierra a una cavidad (P) en el dispositivo de control, cavidad que está conectada a un sensor de presión (F) , siendo la señal del sensor de presión usada por dicha unidad de control (H) para ajustar el movimiento vertical del dispo
sitivo de elevación.
2. Un dispositivo para medir fuerzas aplicadas por un operador de acuerdo con la reivindicación 1, caracterizado porque la cavidad (P) está conectada a la atmósfera circundante a través de una pequeña fuga (O) .
3. Un dispositivo para medir fuerzas aplicadas por un operador de acuerdo con la reivindicación 1, caracteriza
do porque la cavidad (P) está conectada al sensor de presión (F) que está provisto adyacente a la unidad de control
(H) a través de una manguera (E) .
4. Un dispositivo para medir fuerzas aplicadas por un operador de acuerdo con las reivindicaciones 1 y 3, caracterizado porque la manguera (E) está provista de un pivote de tal manera que el asa de control (C) puede girar libremente con respecto al dispositivo de elevación (A) .
5. Un dispositivo para medir fuerzas aplicadas por un operador de acuerdo con la reivindicación 1, caracteriza
do porque la región dentro de la cual puede moverse la parte del asa (L) , a lo largo del árbol pasante (K) , está limi20 tada por posiciones del extremo mecánicas (X, Y) .
Patentes similares o relacionadas:
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial, del 13 de Mayo de 2020, de LIEBHERR-WERK BIBERACH GMBH: Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una […]
Interruptor de control para operar una grúa, del 23 de Octubre de 2019, de KONECRANES GLOBAL CORPORATION: Interruptor de control para operar una grúa, que comprende una carcasa , que se extiende en una dirección longitudinal (L), en el lado frontal (2a) […]
Control de grúa, del 7 de Diciembre de 2016, de PALFINGER AG: Control de grúa para una grúa especialmente una grúa de carga, con un primer modo de servicio en el cual la grúa puede ser manejada […]
DISPOSITIVO DE CONTROL SUSPENDIDO., del 1 de Marzo de 2007, de DEMAG CRANES & COMPONENTS GMBH: Dispositivo de control suspendido que a través de una conducción de control cuelga de una unidad a controlar, en especial conmutadores […]
MECANISMO DE MANDO SUSPENDIDO., del 1 de Noviembre de 2006, de DEMAG CRANES & COMPONENTS GMBH: Mecanismo de mando suspendido que a través de un cable de control cuelga de una unidad que hay que controlar, en especial conmutadores de mando o seguidores suspendidos […]
SISTEMA Y PROCEDIMIENTO DE BLOQUEO DE TRANSMISION DE FUERZA., del 1 de Noviembre de 2005, de GROVE U.S. LLC: Un sistema de bloqueo de transmisión de fuerza , que comprende: - un primer dispositivo de trabajo , - un segundo dispositivo de trabajo , - una primera […]
DISPOSICION DUPLICADA DE JUEGOS DE PALANCAS DE CONTROL DE UN DISTRIBUIDOR DE EQUIPO HIDRAULICO PARA CAMIONES, PARTICULARMENTE GRUAS HIDRAULICAS., del 1 de Mayo de 2003, de FASSI GRU IDRAULICHE S.P.A.: Disposición duplicada de juegos de palancas de control de un distribuidor de equipo hidráulico para camiones, en la que dichos juegos tienen la misma disposición […]
APARATO TRANSPORTADOR DE SUELO CON UN CONJUNTO DE DIRECCIÓN, del 23 de Noviembre de 2011, de OM CARRELLI ELEVATORI S.P.A.: Aparato transportador de suelo, especialmente vehículo comisionador, con un conjunto de dirección configurado como un manillar giratorio que presenta dos […]