Aparato guiado manualmente.
Aparato de localización guiado manualmente con una carcasa (10),
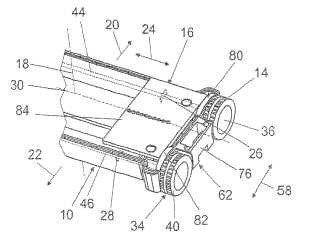
con una unidad de retención (12), con unaunidad de sensor (16) y con un mecanismo de traslación (34), en el que la carcasa (10) es móvil con la unidad deretención (12) sobre una superficie de un objeto de investigación, en el que la unidad de sensor (16) presenta almenos dos sensores (26, 28), con los que se pueden detectar una primera y una segunda magnitud característicadel movimiento, en el que el mecanismo de traslación (34) presenta un primer eje (44) y un segundo eje (46), queestán acoplados en cada caso con uno de los sensores (26, 28), de manera que la primera magnitud del movimientopuede ser detectada sobre el primer eje (44) y la segunda magnitud característica del movimiento puede serdetectada sobre el segundo eje (46), caracterizado porque los dos ejes (44, 46) se extienden perpendicularmente ala extensión longitudinal (24) de la carcasa (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/DE2002/004169.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: HOFFMANN,ERHARD, CLAUSS,STEFAN, SKULTETY-BETZ,UWE, HAASE,BJOERN, HOFFMANN,ULLI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01P1/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › Partes constitutivas de instrumentos.
PDF original: ES-2398645_T3.pdf
Fragmento de la descripción:
Aparato guiado manualmente
Estado de la técnica
La invención parte de un aparato guiado manualmente de acuerdo con el preámbulo de la reivindicación 1.
Se conoce un aparato de localización guiado manualmente, que presenta un mecanismo de traslación con cuatro ruedas, en el que dos ruedas están colocadas en un lado longitudinal del aparato de localización. Las ruedas opuestas entre sí están conectadas a través de un eje que se extiende perpendicularmente a la extensión longitudinal del aparato de localización. El aparato de localización posee en un lado superior de su carcasa una unidad de retención, que se extiende en la dirección de la extensión longitudinal, con la que se puede desplazar el aparato de localización con superficies de rodadura de las ruedas sobre una superficie de un objeto de investigación en la dirección de su extensión longitudinal.
Para el registro de una magnitud característica del movimiento por medio de una unidad de sensor, los dos ejes rígidos y la unidad de sensor están acoplados mecánicamente a través de una correa dentada.
Ventajas de la invención La invención parte de un aparato guiado manualmente, en particular de un aparato de localización, con una carcasa, que es móvil con una unidad de retención sobre una superficie de un objeto de investigación y que presenta una unidad de sensor para el registro de una primera magnitud característica del movimiento.
Se propone que con la unidad de sensor se pueda registrar al menos una segunda magnitud característica de movimiento. De manera ventajosa, se pueden registrar informaciones adicionales, como por ejemplo informaciones sobre una distancia de la carcasa con respecto a la superficie del objeto de investigación y/o informaciones sobre un movimiento de la carcasa sobre una trayectoria de curva, etc. Los resultados de la medición pueden corregirse con las informaciones adicionales y los errores de medición pueden reducirse al menos de manera ventajosa, y en concreto, especialmente comparando entre sí las magnitudes características del movimiento. Además, se pueden representar los errores, en particular los errores que se producen a través de una modificación imprevista de una dirección del movimiento, a través de una pantalla y se pueden corregir manual y/o automáticamente a través de actuadores. Además, en el caso de un fallo de la unidad de sensor con respecto a la detección de la primera magnitud característica del movimiento con la segunda magnitud del movimiento se puede corregir un resultado de la medición al menos parcialmente evaluable y, en concreto, especialmente cuando la segunda magnitud característica del movimiento se diferencia en cuanto al tipo de la primera magnitud característica del movimiento.
Si a partir de las magnitudes características del movimiento registradas se puede registrar una magnitud característica para un movimiento giratorio de la carcasa alrededor de al menos un eje, se puede deducir fácilmente un movimiento no deseado de la carcasa y, en concreto, en particular cuando el eje se extiende en la dirección de la perpendicular de la superficie del objeto de investigación.
En otro desarrollo de la invención se propone que la unidad de sensor presente al menos dos sensores. De manera ventajosa, con componentes normalizados se puede conseguir un dispositivo de construcción sencilla y económico, con el que se pueden detectar al mismo tiempo dos magnitudes características del movimiento.
De manera ventajosa, los sensores están formados, al menos parcialmente, por componentes electrónicos. Se pueden utilizar sensores economizadote de espacio, económicos y exactos, cuyas señales se pueden emitir en forma electrónica y se pueden procesar electrónicamente con facilidad. Las magnitudes características del movimiento se pueden detectar a través de contactos o sin contacto. Si se registran las magnitudes características del movimiento sin contacto, se puede evitar de manera ventajosa una fricción entre componentes correspondientes y se puede elevar la comodidad para un usuario. Los sensores para la detección sin contacto pueden estar diseñados para diferentes magnitudes de entrada que parecen convenientes al técnico, como por ejemplo para magnitudes de entrada magnéticas, eléctricas, ópticas y/o térmicas.
En otra configuración de la invención se propone que la unidad de sensor presente al menos un sensor optoelectrónico, a través del cual se puede detectar al menos una de las magnitudes características del movimiento sin contacto desde la superficie del objeto de investigación. De manera ventajosa se puede conseguir un proceso de medición especialmente confortable, en el que la carcasa se puede mover sin contacto sobre diferentes trayectorias del movimiento sobre la superficie del objeto de investigación, como por ejemplo sobre una trayectoria recta, sobre una trayectoria curvada con un movimiento mixto o sobre una trayectoria en curva, etc.
Además, se propone que en la carcasa esté dispuesto un mecanismo de traslación con al menos un primer cuerpo rodante, a través del cual se puede detectar al menos la primera magnitud característica del movimiento. De manera ventajosa, la primera magnitud característica del movimiento se puede determinar de una manera sencilla en la construcción y económica a través de un movimiento de rodadura del cuerpo rodante sobre la superficie del objeto de investigación.
Si el mecanismo de traslación presenta al menos un segundo cuerpo rodante, a través del cual se puede detectar la segunda magnitud característica del movimiento, se puede detectar de una manera sencilla en la construcción un error de manipulación del usuario y, en concreto, comprando las magnitudes características del movimiento de los dos cuerpos rodantes entre sí, en particular la velocidad de giro. Además, al menos un cuerpo rodante puede ser controlado o bien frenado o acelerado a través de un actuador, para que en el caso de magnitudes características del movimiento diferentes de los dos cuerpos rodantes, éstos se puedan adaptar entre sí.
Los cuerpos rodantes pueden estar montados separados unos de los otros en la carcasa o pueden estar conectados entre sí a través de ejes comunes. Si al menos dos cuerpos rodantes están conectados con un eje rígido de fija contra giro, se puede conseguir una propiedad de guía ventajosa del aparato.
Las magnitudes características del movimiento pueden ser detectadas directamente a través de los cuerpos rodantes individuales y/o a través de los ejes de los cuerpos rodantes. Si al menos otro cuerpo rodante está conectado de forma fija contra giro con un segundo eje y la primera magnitud característica del movimiento es detectable a través del primer eje y la segunda magnitud característica del movimiento es detectable a través del segundo eje, se puede detectar de manera especialmente ventajosa a través de una comparación de las magnitudes características del movimiento de los dos ejes un error de mando del aparato guiado manualmente, como por ejemplo una elevación de al menos un cuerpo rodante desde la superficie del objeto de investigación o un desplazamiento involuntario de la carcasa sobre la trayectoria de la curva. Además, se pueden mejorar adicionalmente las propiedades de guía.
Si la carcasa es desplazable en dos direcciones del movimiento opuestas preferidas y a través de una unidad de sensor se puede determinar la dirección del movimiento, en el caso de un cambio de dirección se puede evitar un vuelco de la carcasa y se puede evitar de manera ventajosa una nueva alineación de la carcasa. Además, se puede garantizar siempre una lectura sencilla de una pantalla, en particular de una pantalla LCD, en la carcasa.
En otra configuración de la invención se propone que la dirección preferida del movimiento se extienda transversalmente a la extensión longitudinal de la carcasa. La carcasa o bien el aparato se pueden desplazar con una unidad de medición, en particular con una unidad de medición para la localización de objetos, lejos a una esquina y se puede medir la distancia hasta la esquina. Si el aparato es móvil durante un proceso de medición o bien de un proceso de localización en dos direcciones opuestas, el aparato se puede desplazar de una manera especialmente ventajosa a dos esquinas opuestas, pudiendo evitarse un vuelco del aparato. Se puede conseguir una movilidad ventajosa en la esquina.
Si en la carcasa está dispuesta al menos una unidad de medición en la extensión longitudinal de la carcasa, se puede desplazar la carcasa, además, con su unidad de medición de manera ventajosa cerca de lo largo de una esquina.
Dibujo Otras ventajas se deducen a partir de la siguiente descripción del dibujo.... [Seguir leyendo]
Reivindicaciones:
1. Aparato de localización guiado manualmente con una carcasa (10) , con una unidad de retención (12) , con una unidad de sensor (16) y con un mecanismo de traslación (34) , en el que la carcasa (10) es móvil con la unidad de retención (12) sobre una superficie de un objeto de investigación, en el que la unidad de sensor (16) presenta al menos dos sensores (26, 28) , con los que se pueden detectar una primera y una segunda magnitud característica del movimiento, en el que el mecanismo de traslación (34) presenta un primer eje (44) y un segundo eje (46) , que están acoplados en cada caso con uno de los sensores (26, 28) , de manera que la primera magnitud del movimiento puede ser detectada sobre el primer eje (44) y la segunda magnitud característica del movimiento puede ser detectada sobre el segundo eje (46) , caracterizado porque los dos ejes (44, 46) se extienden perpendicularmente a la extensión longitudinal (24) de la carcasa (10) .
2. Aparato de acuerdo con la reivindicación 1, caracterizado porque a partir de las magnitudes características del movimiento se puede calcular una magnitud característica para un movimiento giratorio de la carcasa (10) alrededor de al menos un eje (18) .
3. Aparato de acuerdo con la reivindicación 1 ó 2, caracterizado porque los sensores (26, 28) están formados, al menos parcialmente, por componentes electrónicos.
4. Aparato de acuerdo con la reivindicación 3, caracterizado porque la unidad de sensor (16) presenta al menos un sensor optoelectrónico (26, 28) , a través del cual se puede detectar al menos una de las dos magnitudes características del movimiento sin contacto desde la superficie del objeto de investigación.
5. Aparato de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en la carcasa (10) está dispuesto un mecanismo de traslación (34) con al menos un primer cuerpo rodante (36, 38) , a través del cual se puede detectar al menos la primera magnitud característica del movimiento.
6. Aparato de acuerdo con la reivindicación 5, caracterizado porque el mecanismo de traslación (34) presenta al menos un segundo cuerpo rodante (40, 42) , a través del cual se puede detectar al menos la segunda magnitud característica del movimiento.
7. Aparato de acuerdo con la reivindicación 5 ó 6, caracterizado porque al menos dos cuerpos rodantes (36, 38) están conectados de forma fija contra giro con un primer eje (44) .
8. Aparato de acuerdo con la reivindicación 7, caracterizado porque al menos otro cuerpo rodante (40, 42) está conectado de forma fija contra giro con un segundo eje (46) y la primera magnitud característica del movimiento puede ser detectada a través del primer eje (44) y la segunda magnitud característica del movimiento puede ser detectada a través del segundo eje (46) .
9. Aparato de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la carcasa (10) es desplazable en dos direcciones del movimiento (20, 22) opuestas preferidas y a través de la unidad de sensor (16) se puede determinar la dirección del movimiento (20, 22) .
10. Aparato de acuerdo con la reivindicación 9, caracterizado porque la dirección preferida del movimiento (20, 22) se extiende transversalmente a la extensión longitudinal (24) de la carcasa (10) .
11. Aparato de acuerdo con la reivindicación 10, caracterizado porque en la carcasa (10) en la extensión longitudinal (24) de la carcasa (10) en una zona extrema (48) está dispuesta una unidad de medición (50) .
Patentes similares o relacionadas:
Acelerómetro y procedimiento para la compensación de errores, del 7 de Agosto de 2019, de L-3 Communications Corporation: Un aparato que comprende: transductores de aceleración vertical, lateral y longitudinal que producen señales no corregidas […]
Unidad de medición inercial de aeronave no tripulada, del 21 de Diciembre de 2018, de SZ DJI Technology Co., Ltd: Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador […]
Balón de fútbol perfeccionado, del 3 de Agosto de 2018, de G.O Y C. TECNO. SL: 1. Balón de futbol perfeccionado, que siendo del tipo de los que están constituidos a partir de una envolvente exterior , de piel, textil o material […]
 BALÓN DE FÚTBOL PERFECCIONADO, del 11 de Agosto de 2014, de SALVATIERRA SANCHEZ, Francisco: 1. Balón de fútbol perfeccionado, del tipo que comprenden un cuerpo o envolvente (1a) a base de, al menos, una piel exterior (1d) y una capa de material impermeable (1e) […]
BALÓN DE FÚTBOL PERFECCIONADO, del 11 de Agosto de 2014, de SALVATIERRA SANCHEZ, Francisco: 1. Balón de fútbol perfeccionado, del tipo que comprenden un cuerpo o envolvente (1a) a base de, al menos, una piel exterior (1d) y una capa de material impermeable (1e) […]
Pieza de sujeción para el montaje de un sensor, del 2 de Mayo de 2012, de OMRON ELECTRONICS MANUFACTURING OF GERMANY GMBH: Pieza de sujeción para el montaje de un sensor en una abertura de un dispositivo, que presenta almenos dos módulos de montaje que están […]
Sensor de aire comprimido, del 14 de Marzo de 2012, de ROBERT BOSCH GMBH: Sensor de aire comprimido para la detección de impacto lateral con medios de fijación para la fijación del sensor de aire comprimido en una pared del vehículo, […]
 RODAMIENTO QUE COMPRENDE UNA JUNTA DE ESTANQUEIDAD CON CODIFICADOR INCORPORADO, del 28 de Octubre de 2010, de SNR ROULEMENTS: LA INVENCION SE REFIERE A UNA JUNTA HERMETICA DESTINADA A IR MONTADA ENTRE UN ANILLO FIJO Y UN ANILLO MOVIL DE UN RODAMIENTO. […]
RODAMIENTO QUE COMPRENDE UNA JUNTA DE ESTANQUEIDAD CON CODIFICADOR INCORPORADO, del 28 de Octubre de 2010, de SNR ROULEMENTS: LA INVENCION SE REFIERE A UNA JUNTA HERMETICA DESTINADA A IR MONTADA ENTRE UN ANILLO FIJO Y UN ANILLO MOVIL DE UN RODAMIENTO. […]
 MONTURA PARA LA FIJACION DE UN SENSOR, del 16 de Agosto de 2007, de DEERE & COMPANY: Montura para la fijación de un sensor con una carcasa y una perforación del sensor, que se extiende a través de la carcasa , caracterizada […]
MONTURA PARA LA FIJACION DE UN SENSOR, del 16 de Agosto de 2007, de DEERE & COMPANY: Montura para la fijación de un sensor con una carcasa y una perforación del sensor, que se extiende a través de la carcasa , caracterizada […]