Aparato automáticamente desplazable.
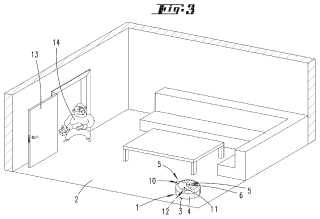
Aparato automáticamente desplazable (1), en particular aparato de limpieza para limpiar un suelo (2),
como unrobot de aspirar y/o barrer, con unos sensores (5) que trabajan sin contacto para la detección de objetos, pudiendoalmacenarse datos correspondientes en el aparato, caracterizado por que en el aparato puede depositarse unacartografía de una zona, por ejemplo de una vivienda, porque está prevista una medición de distanciasomnidireccional con unos sensores giratorios y porque en un lapso de tiempo predeterminado puede usarse unadetección que ha de evaluarse como distinta en comparación con una cartografía almacenada que no disparaninguna alarma como disparo de una alarma por ejemplo acústica o que puede transmitirse para una comprobaciónen este sentido.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11177539.
Solicitante: VORWERK & CO. INTERHOLDING GMBH.
Nacionalidad solicitante: Alemania.
Dirección: MÜHLENWEG 17-37 42275 WUPPERTAL ALEMANIA.
Inventor/es: MEYER, FRANK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G08B13/19 FISICA. › G08 SEÑALIZACION. › G08B SISTEMAS DE SEÑALIZACION O DE LLAMADA; TRANSMISORES TELEGRAFICOS DE ORDENES; SISTEMAS DE ALARMA. › G08B 13/00 Alarmas contra ladrones, los atracadores o cualquier intruso. › utilizando sistemas detectores de radiación infrarrojos.
- G08B13/196 G08B 13/00 […] › utilizando cámaras de televisión.
PDF original: ES-2406765_T3.pdf
Fragmento de la descripción:
Aparato automáticamente desplazable La invención se refiere a un aparato automáticamente desplazable según las características del preámbulo de la reivindicación 1 y a un procedimiento para la vigilancia de una habitación según las características del preámbulo de la reivindicación 10.
Son conocidos los aparatos automáticamente desplazables aquí en cuestión, en particular en forma de aparatos de limpieza y de transporte, también en particular en el área doméstica. Estos aparatos trabajan en el servicio (de limpieza) preferiblemente sin intervención por parte del usuario. En particular, mediante una transmisión de órdenes, en particular por parte del usuario, el aparato se desplaza automáticamente por ejemplo en una habitación predeterminada, para limpiar preferiblemente de forma automática según una estrategia de desplazamiento predeterminada y programada por ejemplo el suelo. El aparato se desplaza aquí, además, preferiblemente con ayuda de una cartografía de la zona, por ejemplo de una vivienda, depositada en el aparato, elaborándose esta cartografía automáticamente, por ejemplo antes de un primer uso del aparato o de forma alternativa durante un recorrido de aprendizaje guiado por el usuario. En la carta depositada están registradas preferiblemente además de los límites habituales de la habitación también objetos, como en particular armarios u otros muebles. Como alternativa o de forma adicional, el aparato también puede estar realizado para la elaboración automática de una cartografía. Para la elaboración en particular automática de la cartografía, además, también para la detección de obstáculos durante el desplazamiento habitual, en particular desplazamiento de limpieza del aparato, éste presenta al menos unos sensores con los que pueden registrarse obstáculos, además de objetos en el entorno del aparato. Respecto a ello también es conocido realizar mediciones de distancias por ultrasonidos o también por infrarrojos, siendo posible gracias a los valores de distancias determinados durante el desplazamiento habitual o también durante la parada del aparato con ayuda de la cartografía preferiblemente depositada también una determinación unívoca de la posición del aparato en la carta o en la vivienda. Para ello, los sensores están orientados al menos hacia la zona que, visto en la dirección de desplazamiento habitual del aparato, está dispuesta delante del mismo. Además, se conocen soluciones en las que se realiza una medición de distancias omnidireccional; esto en particular gracias a unos sensores que giran alrededor de un eje vertical, además, preferiblemente usándose un sistema de triangulación giratorio. También se conocen soluciones en las que el aparato presenta una cámara electrónica, por ejemplo en forma de una webcam, para la detección de objetos o de obstáculos. La imagen tomada se analiza directamente en el aparato, en particular respecto a objetos que se encuentran en el recorrido de desplazamiento, que impiden seguir con el desplazamiento en la dirección tomada.
Respecto a dicha configuración para la detección de obstáculos y/o choques, se remite por ejemplo a los documentos DE 103 57 936 A1, DE 10 2008 061 259 A1, DE 10 2008 014 912 A1 y DE 10 2009 023 066 A1. Las configuraciones mencionadas respecto a la orientación y/o la elaboración de una cartografía y/o respecto a una estrategia de desplazamiento se conocen por ejemplo por los documentos DE 10 2009 041 362 A1, DE 10 2009 059 217 A1, DE 10 2010 000 317 A1, DE 10 2010 000 174 A1 y DE 10 2010 017 689 A1.
Por el documento US 2005/237189 A1 se conoce un aparato automáticamente desplazable, que está equipado con un sensor que detecta a una persona. Por el documento DE 102 42 257 A1 se conoce un aparato de limpieza automáticamente desplazable, aunque no presenta ninguna función de alarma. Respecto al estado de la técnica ha de remitirse, por cierto, también a los documentos EP 2 194 503 A1 y US 5, 473, 364 A.
Partiendo del estado de la técnica indicado, la invención tiene el objetivo de indicar un aparato automáticamente desplazable que esté realizado de forma ventajosa, así como un procedimiento para el uso ventajoso de un aparato automáticamente desplazable de este tipo.
En el objeto de la reivindicación 1 se indica en primer lugar como se consigue este objetivo, estando previsto que en el aparato pueda depositarse una cartografía de una zona , por ejemplo de una vivienda, que esté prevista una medición de distancias omnidireccional con unos sensores giratorios alrededor de un eje vertical y que en un lapso de tiempo predeterminado pueda usarse una detección que ha de evaluarse como distinta (anormal) en comparación con una cartografía almacenada que no dispara ningún alarma como disparo de una alarma por ejemplo acústica o que pueda transmitirse para una comprobación en este sentido.
Respecto al procedimiento, el objetivo se consigue mediante el objeto de la reivindicación 10, estando previsto que en el aparato se deposite una cartografía de una zona, por ejemplo una vivienda, que se realice una medición de distancias omnidireccional con unos sensores giratorios alrededor de un eje vertical y que en un lapso de tiempo predeterminado se use una detección que ha de evaluarse como distinta (anormal) en comparación con una cartografía almacenada que no dispara ningún alarma como disparo de una alarma por ejemplo acústica o que se transmita para una comprobación en este sentido.
Según la configuración propuesta, un aparato automáticamente desplazable que ha de realizarse de forma favorable respecto a un uso de los sensores está provisto de unos sensores que trabajan sin contacto y/o con contacto para la detección de objetos, que puede trabajar de forma complementaria a una o varias otras funciones posibles como instalación de alarma o con la única función de instalación de alarma. Esto preferiblemente usándose funciones independientes dado el caso de por sí existentes o previstas para otras funciones, en particular usándose los sensores que trabajan sin contacto y/o con contacto para la detección de objetos. Gracias a los sensores existentes, el aparato es capaz de detectar el entorno en su radio de acción. Aquí, unos sensores de distancia pueden detectar, en particular también en una parada del aparato, por ejemplo un cambio de un valor de distancia, lo que permite deducir que había un cambio del objeto, como por ejemplo una rotura de vidrio, un desplazamiento de un objeto o un objeto nuevo. Este cambio se registra mediante un software previsto, que genera correspondientemente una señal de alarma.
El cambio puede producirse en un lapso de tiempo predeterminado de por ejemplo cinco minutos o más, hasta algunas horas, por ejemplo cuatro o seis horas, de acuerdo con una observación continua de datos registrados y almacenados por el propio aparato. El entorno normal, es decir, el que no dispara ninguna alarma, está mapeado en la cartografía, para lo cual se usa la cartografía que sirve (también para fines de limpieza) y que está almacenada o como alternativa una cartografía actual, que sólo sirve para el lapso de tiempo predeterminado en cuestión. Mediante los sensores, por ejemplo escáner de ultrasonidos o infrarrojos, el aparato puede detectar cambios en el entorno, en particular cambios temporales, en comparación con la cartografía. Puesto que el aparato puede actuar preferiblemente con un suministro de energía propio, por ejemplo en forma de acumuladores, en particular de forma independiente de por ejemplo una red eléctrica, respecto a la función de instalación de alarma, en particular tampoco puede perjudicar la acción del aparato un corte de corriente.
En particular, también respecto un aparato indicado al principio, es preferible que éste se use para la vigilancia de una habitación o de múltiples habitaciones, usándose este aparato preferiblemente de forma adicional a la vigilancia también para realizar tareas de limpieza, en particular respecto a los suelos de las habitaciones indicadas.
Gracias a ello es posible en primer lugar realizar una vigilancia mediante un aparato automáticamente desplazable, que puede desplazarse de forma controlada o autodirigida a distintos lugares en una habitación o en múltiples habitaciones. Mediante unos sensores que trabajan sin contacto y/o con contacto para la detección de objetos o estados (por ejemplo luz y/o sonido) , pueden realizarse funciones de vigilancia. En particular, es preferible que el aparato sea un aparato que habitualmente no se relacione con la realización de tareas de vigilancia, en particular tampoco para el disparo de una alarma. Gracias a que el aparato realiza en una configuración preferible básicamente y dado el caso predominantemente y en primer lugar tareas... [Seguir leyendo]
Reivindicaciones:
1. Aparato automáticamente desplazable (1) , en particular aparato de limpieza para limpiar un suelo (2) , como un robot de aspirar y/o barrer, con unos sensores (5) que trabajan sin contacto para la detección de objetos, pudiendo almacenarse datos correspondientes en el aparato, caracterizado por que en el aparato puede depositarse una cartografía de una zona, por ejemplo de una vivienda, porque está prevista una medición de distancias omnidireccional con unos sensores giratorios y porque en un lapso de tiempo predeterminado puede usarse una detección que ha de evaluarse como distinta en comparación con una cartografía almacenada que no dispara ninguna alarma como disparo de una alarma por ejemplo acústica o que puede transmitirse para una comprobación en este sentido.
2. Aparato automáticamente desplazable (1) según la reivindicación 1, caracterizado por que la alarma se produce mediante la generación de una señal acústica y/u óptica y/o puede transmitirse a un dispositivo de procesamiento de información.
3. Aparato automáticamente desplazable (1) según la reivindicación 1 o 2, caracterizado por que el aparato (1) procesa cambios detectados mediante los sensores (5) en el entorno detectado para disparar una alarma.
4. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que los sensores (5) pueden ser activados al margen de un recorrido de limpieza o aprendizaje, independientemente de la función de aspirar y/o barrer.
5. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que está prevista una estación base (15) , a la que puede desplazarse el aparato (1) automáticamente y porque en la estación base (15) se realiza una carga de los acumuladores del aparato (1) y/o un vaciado de un recipiente colector de suciedad del aparato (1) y/o una transmisión de informaciones.
6. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que el aparato (1) envía informaciones mediante WLAN y/o radio y/o infrarrojo.
7. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que el aparato (1) puede ser mandado a distancia mediante un módulo de comunicación inalámbrico, como un teléfono inalámbrico, un teléfono móvil o un smartphone para el fin de una televigilancia de una habitación.
8. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que una parte receptora (16) de un mando a distancia por infrarrojos que se encuentra en el aparato (1) puede ampliarse para la recepción de luz visible.
9. Aparato automáticamente desplazable (1) según una de las reivindicaciones anteriores, caracterizado por que el aparato (1) presenta una cámara (10) preferiblemente orientable.
10. Procedimiento para la vigilancia de una habitación o de múltiples habitaciones mediante un aparato automáticamente desplazable, en particular un aparato de limpieza para la limpieza de un suelo (2) , como un robot de aspirar y/o barrer, con unos sensores (5) que trabajan sin contacto para la detección de objetos, pudiendo realizarse mediante este aparato preferiblemente además de la vigilancia también tareas de limpieza, en particular respecto a los suelos de las habitaciones indicadas, realizándose además una detección de un objeto, dado el caso respecto a un movimiento o una forma del objeto, que se compara con datos almacenados al respecto para el objeto y que se usa en caso de evaluarse distinta, como disparo para una alarma por ejemplo acústica o se transmite para una comprobación en este sentido, caracterizado por que en el aparato está depositada una cartografía de una zona, por ejemplo de una vivienda, porque se realiza una medición de distancias omnidireccional con unos sensores giratorios y porque en un lapso de tiempo predeterminado se usa una detección que ha de evaluarse como distinta en comparación con una cartografía almacenada que no dispara ninguna alarma como disparo de una alarma por ejemplo acústica o se transmite para una comprobación en este sentido.
11. Procedimiento según la reivindicación 10, caracterizado por que las tareas de vigilancia y preferiblemente de limpieza se realizan al mismo tiempo o sucesivamente con diferencia de horas.
12. Procedimiento según una de las reivindicaciones 10 u 11, caracterizado por que las tareas de vigilancia se realizan cuando el aparato está parado o durante el desplazamiento del aparato.
13. Procedimiento según una de las reivindicaciones 10 a 12, caracterizado por que, al detectar un cambio de una situación predeterminada, el aparato dispara inmediatamente o de forma retardada en el tiempo una alarma.
14. Procedimiento según una de las reivindicaciones 10 a 13, caracterizado por que el aparato dispara una alarma acústica y/u óptica y/o el aparato transmite de forma inalámbrica, por ejemplo por radio, un mensaje de alarma a un receptor, preferiblemente sin que sea vea una actividad de este tipo en el aparato propiamente dicho.
Patentes similares o relacionadas:
Sistema y método para ocultar dinámicamente video e imágenes capturadas con una cámara de dispositivo dron, del 10 de Junio de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: dar instrucciones a un dispositivo dron para que vuele cerca de una potencial área de vigilancia mientras está en […]
Procedimiento y sistema de monitoreo, del 27 de Mayo de 2020, de MariCare Oy: Procedimiento para observar la presencia, ubicación, movimiento y/o postura de uno o más objetos a monitorear con un sistema de monitoreo, […]
Procedimiento de visualización de imágenes o vídeos e instalación asociada, del 29 de Abril de 2020, de THALES: Procedimiento de visualización sobre un visualizador de imágenes o vídeos procedentes de cámaras , constando el visualizador de varias zonas de visualización […]
Sistema y procedimiento de actualizaciones de parámetros de cámara basados en zonas virtuales en sistemas de vídeo vigilancia, del 18 de Marzo de 2020, de HONEYWELL INTERNATIONAL INC.: Un método que comprende: un procesador de un sistema de vigilancia que detecta la selección de al menos una porción de un área asegurada a través de […]
CARCASA ANTIVANDÁLICA PARA CÁMARA DE SEGURIDAD, del 20 de Febrero de 2020, de DOVER SOLUTIONS, SL: 1. Carcasa antivandálica para cámara de seguridad caracterizada porque comprende una carcasa inferior que presenta una sección transversal […]
Distribución de luz NIR altamente eficiente para la detección de intrusión basada en creación de imágenes, del 19 de Febrero de 2020, de HONEYWELL INTERNATIONAL INC.: Un aparato que comprende: un diodo emisor de luz (LED) de infrarrojo cercano (NIR) que tiene un eje predominante de transmisión de luz NIR desde el LED; y una […]
Método de defensa y rechazo, del 13 de Noviembre de 2019, de The Security Oracle, Inc: Método para proteger activamente un activo físico/área mediante defensa y rechazo, que comprende: recibir, por una red informática, datos de sensor asociados a características […]
Sistema y método para controlar sistemas de seguridad, del 25 de Octubre de 2019, de HONEYWELL INTERNATIONAL INC.: Método que comprende: la transmisión por parte de un controlador aguas abajo de un sistema de seguridad de un anuncio de un tipo de servicio del controlador […]