UN CONTROLADOR ELECTRÓNICO PARA UNA TRANSMISIÓN DE VARIACIÓN CONTINUA, UNA TRANSMISIÓN DE VARIACIÓN CONTINUA (CVT) Y UN MÉTODO DE CONTROL DE UNA TRANSMISIÓN DE VARIACIÓN CONTINUA.
Un controlador electrónico para una transmisión de variación continua que comprende un variador (10) que tiene una entrada de variador rotativa (17) acoplada a una primera carrera del variador (14a,
14b), una salida de variador rotativa (29) acoplada a una segunda carrera del variador (16a, 16b) y al menos un rodillo (20a, 20b) que corre en dichas carreras (14a, 14b, 16a, 16b) para transferir el impulso de una a la otra, el(los) rodillo(s) (20a, 20b) que es(son) móvil(es) para variar de forma continua la relación del variador, el variador (10) que además comprende al menos un actuador hidráulico (36a, 36b, 38a, 38b) que actúa en el(los) rodillo(s) (20a, 20b) y a través del cual el par neto que actúa en las carreras del variador (14a, 14b, 16a, 16b) se refiere a través del(de los) rodillo(s) (20a, 20b) a la cubierta del variador, y una adaptación hidráulica (40a, 40b, P1, P2) para aplicar al(a los) actuador(es) (36a, 36b, 38a, 38b) al menos una presión de control hidráulica que determina la fuerza aplicada por el(los) actuador(es) (36a, 36b, 38a, 38b) y determina de esta manera el par de reacción, el variador (10) que se acopla entre una entrada de transmisión rotativa y una salida de transmisión rotativa de manera que la relación de transmisión es una función de la relación del variador, el controlador electrónico que se caracteriza porque está configurado para llevar a cabo los siguientes pasos en un bucle: medir una relación de velocidad de la transmisión de variación continua; comparar la relación de velocidad medida con una relación de velocidad objetivo; determinar una petición de par de salida de transmisión en base a dicha comparación; convertir la petición de par de salida a una petición de presión de control, que tiene en cuenta la relación de velocidad; diferenciar la petición de presión de control con respecto al tiempo para obtener un valor de compensación y aplicar el valor de compensación a la petición de presión de control; y sacar la petición de presión de control compensada resultante a la adaptación de válvula hidráulica
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2009/050260.
F16H15/38MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16HTRANSMISIONES. › F16H 15/00 Transmisiones para transmitir un movimiento rotativo con relación de velocidad variable o para invertir un movimiento rotativo por fricción entre órganos rotativos (control para cambio de velocidad o para inversión de transmisiones que transmiten un movimiento rotativo F16H 59/00 - F16H 63/00). › con dos órganos B que tienen superficies huecas toroidales opuestas entre sí, siendo el órgano o los órganos A situados de una manera regulable entre estas superficies.
F16H61/664F16H […] › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Transmisiones por fricción.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania, Bosnia y Herzegovina, Bulgaria, República Checa, Estonia, Croacia, Hungría, Islandia, Noruega, Polonia, Eslovaquia, Turquía, Malta, Serbia.
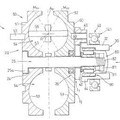
Un controlador electrónico para una transmisión de variación continua, una transmisión de variación continua (CVT) y un método de control de una transmisión de variación continua. La presente invención se refiere a un controlador electrónico para unas transmisiones de variación continua (CVT), una transmisión de variación continua que comprende tal controlador y un método para controlar una transmisión de variación continua. Es aplicable concretamente, aunque no exclusivamente, al control de las CVT de vehículos a motor a velocidades de vehículo bajas. Una CVT típicamente incorpora una unidad conocida como un variador que tiene una entrada de variador rotativa, una salida de variador rotativa, y un mecanismo para transmitir el impulso de una a la otra mientras que permite que la relación de la velocidad de salida a la velocidad de entrada (la relación del variador) sea variada de forma continua. Una CVT típica además comprende los engranajes por medio de los cuales el variador se acopla entre una entrada de transmisión general (por ejemplo, el eje de transmisión de un motor de vehículo) y la salida (por ejemplo, la transmisión final del vehículo, que lleva a sus ruedas). La relación de las velocidades de la salida y entrada de transmisión (la relación de transmisión) típicamente no es la misma que la relación del variador, que se modifica por los engranajes. Tales engranajes pueden incluir un engranaje de derivación, típicamente de tipo epicíclico, que permite a la transmisión proporcionar velocidad de salida muy baja, e incluso cero, mientras que su entrada está siendo impulsada. La derivación tiene una primera parte acoplada al lado de la entrada del variador, una segunda parte acoplada al lado de la salida del variador, y una tercera parte acoplada a la salida de la transmisión. Mediante el diseño adecuado del engranaje de derivación se puede disponer que en una cierta relación del variador, las velocidades de las dos primeras partes se cancelen entre sí, y la salida de transmisión es de esta manera estacionaria incluso aunque permanezca mecánicamente acoplada a la entrada de transmisión que gira. Esta condición en la que la transmisión proporciona una reducción de velocidad infinita se conoce como punto muerto engranado. Las relaciones del variador en lados opuestos del punto muerto engranado proporcionan direcciones de rotación opuestas en la salida de transmisión (hacia delante y marcha atrás, en una transmisión de vehículo). Una transmisión de este tipo en principio es capaz de impulsar un vehículo a motor a una velocidad sostenida y muy lenta, una facilidad que es potencialmente muy útil. Los problemas surgen, no obstante, en el control del variador bajo tales condiciones. Antes de explicar los problemas, es necesario decir algo acerca de la construcción y el control de un variador. Un variador de tipo tracción de rodillo y carrera toroidal se ilustra en las Figuras 1 y 2. Este tipo de variador es en sí mismo bien conocido en la técnica. Se presenta aquí meramente para ilustrar ciertos principios relevantes. El variador ilustrado 10 tiene cavidades toroidales gemelas 12a, b, cada una definida entre una respectiva carrera de entrada 14a, b y una carrera de salida 16a, b respectiva. Las carreras se montan para rotación alrededor de un eje común 15, definido en este ejemplo mediante un eje del variador 17. Las superficies enfrentadas de las parejas de carrera de entrada/salida se empotran semitoroidalmente (como se ve en 18 en la Figura 2 y se indica por líneas discontinuas en la Figura 1), y dentro de cada una de las cavidades 12a, b está un conjunto de rodillos 20a, b que corren sobre las superficies empotradas. Los rodillos sirven para transferir el impulso entre las carreras de entrada y salida. En el ejemplo ilustrado cada cavidad 12a, b contiene tres rodillos 20a, b, aunque la Figura 1 muestra solamente uno de aquellos, en aras de la simplicidad. Cada rodillo tiene un eje, que en la Figura 1 es perpendicular al plano del papel y se indica en 22a, b, y se monta en un balancín 24 a, b para la rotación alrededor de su eje. Las dos carreras de salida 16a, b se acoplan para rotar juntas. En el ejemplo ilustrado este acoplamiento se hace a través del eje 17 en el cual se montan ambos por ejemplo a través de lengüetas (no se muestran). Las dos carreras de entrada también se acoplan para girar juntas, por ejemplo a través de un manguito 26, pero son capaces de girar independientemente del eje 17, siendo montadas en él a través de cojinetes (no se muestran). El manguito 26 en este ejemplo traslada una polea o engranaje 29 que engancha con una correa o cadena (no se muestra) para formar la salida del variador. Una fuerza se aplica como se indica mediante una flecha 28 para instar a las carreras 14a, b, 16a, b en el engranaje con los rodillos y así proporcionar la tracción rodillo/carrera. Cuando el eje 17 y las carreras de entrada 14a, b transportadas en él se impulsan para girar, hacen que los rodillos 20a, b giren alrededor de sus ejes, y los rodillos impulsan las carreras de salida 16a, b. De esta forma el variador transmite el impulso. Los rodillos son capaces de moverse para variar de forma continua la relación del variador. En el ejemplo ilustrado el balancín 24a, b de cada rodillo se conecta a través de una biela 34a, b a un respectivo pistón 36a, b que corre en un cilindro 38a, b para formar un actuador hidráulico. Como el pistón 36a, b se mueve en su cilindro, su rodillo 20a, b se mueve a lo largo de un trayecto circular alrededor del eje común 15. Señalar también que cada rodillo es capaz de 2 experimentar un movimiento de inclinación, girando alrededor de un eje inclinado 39a, b definido por su acoplamiento con el pistón 36a, b. Como cada rodillo se mueve atrás y adelante sufre un efecto de dirección debido a la acción de las carreras en él, provocándole inclinarse automáticamente para encontrar una posición en la que el eje del rodillo 22a, b se cruza con el eje común 15 de las carreras. Todos los rodillos 20a, b experimentan tal movimiento considerablemente al unísono. El movimiento de inclinación del rodillo provoca un cambio en las velocidades relativas de las carreras de entrada y salida es decir un cambio en la relación de velocidad del variador. Cuando se transmite la potencia a través del variador, las carreras ejercen una fuerza neta en los rodillos tendiendo a moverlos a lo largo de sus trayectos circulares alrededor del eje común 15. Dado que esta fuerza actúa alrededor del eje, a una distancia de él igual al radio de dicho trayecto circular, se puede expresar como un par (fuerza multiplicada por distancia) que actúa alrededor del eje. Este par se debe hacer reaccionar a través de los actuadores 36, 38 con un objeto fijo tal como la cubierta del variador (no se muestra). La suma de tales pares que actúan en todos los rodillos es el par total que reacciona con la cubierta y de esta manera se conoce como el par de reacción. La fuerza ejercida en cada rodillo por las carreras se debe equilibrar directamente por la fuerza ejercida en el rodillo por su actuador 36, 38. De ahí que mediante el ajuste de la fuerza del actuador (que se determina por una diferencia en las presiones entre las líneas hidráulicas 40a, b que suministran los lados opuestos de cada pistón 36a, b), el par de reacción se ajuste directamente. Adicionalmente el par de reacción debe ser claramente igual al par neto aplicado al variador es decir a la suma de los pares que actúan en su entrada y salida. Esta cantidad se controla directamente de esta manera mediante el control de la fuerza del actuador. Señalar que el sistema físico ilustrado en las Figuras 1 y 2 no proporciona medios directos de ajuste de una relación de la velocidad del variador requerida. En su lugar, los cambios en la relación tienen lugar automáticamente, en virtud de la construcción física de la transmisión, como resultado de los pares en la entrada y salida del variador. Para apreciar esto, consideremos la representación simplificada y esquemática a groso modo proporcionada en la Figura 3. Un motor ejerce un par motor TE en el lado de entrada de la transmisión. La acción del variador crea un par TIN en el mismo lado de la transmisión. Ambos actúan sobre la inercia WIN a la que se refiere la entrada del variador (contribuida por las partes de giro del motor y la transmisión). El par neto TE+TIN actúa sobre la inercia WIN y, si el par neto no es cero, hace que se acelere. La relación de velocidad del variador cambia automáticamente para acomodar tal aceleración. En su lado de salida del par de transmisión TOUT se añade a cualquier par TB a partir de los frenos del vehículo y el par TW en las ruedas debido a arrastrar el vehículo que está en una pendiente etc. para proporcionar un par neto que actúa sobre la inercia WOUT (la cual... [Seguir leyendo]
Reivindicaciones:
1. Un controlador electrónico para una transmisión de variación continua que comprende un variador (10) que tiene una entrada de variador rotativa (17) acoplada a una primera carrera del variador (14a, 14b), una salida de variador rotativa (29) acoplada a una segunda carrera del variador (16a, 16b) y al menos un rodillo (20a, 20b) que corre en dichas carreras (14a, 14b, 16a, 16b) para transferir el impulso de una a la otra, el(los) rodillo(s) (20a, 20b) que es(son) móvil(es) para variar de forma continua la relación del variador, el variador (10) que además comprende al menos un actuador hidráulico (36a, 36b, 38a, 38b) que actúa en el(los) rodillo(s) (20a, 20b) y a través del cual el par neto que actúa en las carreras del variador (14a, 14b, 16a, 16b) se refiere a través del(de los) rodillo(s) (20a, 20b) a la cubierta del variador, y una adaptación hidráulica (40a, 40b, P1, P2) para aplicar al(a los) actuador(es) (36a, 36b, 38a, 38b) al menos una presión de control hidráulica que determina la fuerza aplicada por el(los) actuador(es) (36a, 36b, 38a, 38b) y determina de esta manera el par de reacción, el variador (10) que se acopla entre una entrada de transmisión rotativa y una salida de transmisión rotativa de manera que la relación de transmisión es una función de la relación del variador, el controlador electrónico que se caracteriza porque está configurado para llevar a cabo los siguientes pasos en un bucle: medir una relación de velocidad de la transmisión de variación continua; comparar la relación de velocidad medida con una relación de velocidad objetivo; determinar una petición de par de salida de transmisión en base a dicha comparación; convertir la petición de par de salida a una petición de presión de control, que tiene en cuenta la relación de velocidad; diferenciar la petición de presión de control con respecto al tiempo para obtener un valor de compensación y aplicar el valor de compensación a la petición de presión de control; y sacar la petición de presión de control compensada resultante a la adaptación de válvula hidráulica. 2. Un controlador electrónico como se reivindica en la reivindicación 1, en el que la relación de velocidad medida es la relación del variador. 3. Un controlador electrónico como se reivindica en la reivindicación 2, en el que la relación del variador medida se convierte a una relación de transmisión medida. 4. Un controlador electrónico como se reivindica en cualquier reivindicación precedente en el que la comparación de la relación de velocidad medida con la relación de velocidad objetivo implica restar una de la otra. 5. Un controlador electrónico como se reivindica en cualquier reivindicación precedente en el que la determinación de la petición de par de salida se lleva a cabo por un controlador integral proporcional (122) en base a la comparación anteriormente mencionada. 6. Un controlador electrónico como se reivindica en cualquier reivindicación precedente en el que el valor de compensación se obtiene multiplicando el diferencial de la petición de presión de control por un factor que corresponde a un retraso de tiempo en la adaptación hidráulica. 7. Una transmisión de variación continua que incorpora un controlador electrónico como se reivindica en cualquier reivindicación precedente. 8. Una transmisión de variación continua como se reivindica en la reivindicación 7 que incorpora un engranaje de derivación y es capaz de proporcionar un punto muerto engranado. 9. Una transmisión de variación continua como se reivindica en la reivindicación 7 o la reivindicación 8 que incluye una válvula de control de presión (P1, P2) dispuesta para sacar la presión de control al(a los) actuador(es) (36a, 36b, 38a, 38b), la válvula de control de presión que se dispone para recibir la petición de presión de control compensada y que se adapta para ajustar la presión de control de acuerdo con la petición. 10. Una transmisión de variación continua como se reivindica en la reivindicación 9, en la que un conducto que conecta la válvula de control de presión y el actuador incorpora un orificio estrangulado (O1, O2) a través del cual se crea una diferencia de presión por el flujo que lo atraviesa. 11. Una transmisión de variación continua como se reivindica en la reivindicación 10 en la cual la adaptación hidráulica comprende el cumplimiento de la creación de un retraso de tiempo entre el ajuste de la presión de salida de la válvula y el cambio correspondiente en la presión recibida en el actuador. 12. Un método de controlar una transmisión de variación continua que comprende un variador (10) el cual tiene una entrada del variador rotativa (17) acoplada a una primera carrera del variador (14a, 14b), una salida del variador rotativa (29) acoplada a una segunda carrera del variador (16a, 16b) y al menos un rodillo (20a, 20b) que corre en dichas carreras (14a, 14b, 16a, 16b) para transferir el impulso de una a la otra, el(los) rodillo(s) (20a, 20b) que 9 es(son) móvil(es) para variar de forma continua la relación del variador, el variador (10) que además comprende al menos un actuador hidráulico (36a, 36b, 38a, 38b) que actúa en el(los) rodillo(s) (20a, 20b) y a través del cual el par neto que actúa en las carreras del variador (14a, 14b, 16a, 16b) se refiere a través del(de los) rodillo(s) (20a, 20b) a la cubierta del variador, y una adaptación hidráulica (40a, 40b, P1, P2) para aplicar al(a los) actuador(es) (36a, 36b, 38a, 38b) al menos una presión de control hidráulica que determina la fuerza aplicada por el(los) actuador(es) (36a, 36b, 38a, 38b) y determina de esta manera el par de reacción, el variador (10) que se acopla entre una entrada de transmisión rotativa y una salida de transmisión rotativa de manera que la relación de transmisión es una función de la relación del variador, el método que se caracteriza porque comprende llevar a cabo los siguientes pasos en un bucle: medir una relación de velocidad de la transmisión de variación continua; comparar la relación de velocidad medida con una relación de velocidad objetivo; determinar una petición de par de salida de la transmisión en base a dicha comparación; convertir la petición de par de salida a una petición de presión de control, que tiene en cuenta la relación de velocidad; diferenciar la petición de presión de control con respecto al tiempo para obtener un valor de compensación y aplicar el valor de compensación a la petición de presión de control; y sacar la petición de presión de control compensada resultante a la adaptación de válvula hidráulica. 13. Un método como se reivindica en la reivindicación 12 en el que la determinación de la petición de par de salida se lleva a cabo por un método integral proporcional. 14. Un método como se reivindica en la reivindicación 13 o la reivindicación 14 en el que la medición de la relación de velocidad implicó la medición de las velocidades de entrada y la de salida del variador (10). 11 12 13 14 16
Patentes similares o relacionadas:
Sistema de tracción para vehículos híbridos, del 12 de Febrero de 2019, de Cesaroni, Antonio Francisco: Un sistema de tracción para vehículos, que comprende:
- una primera fuente de alimentación de tipo no reversible;
- una segunda […]
Transmisión variable reversible - RVT, del 1 de Junio de 2016, de DE MAZIÈRE, FILIP: Variador planetario, que funciona como subsistema para transmisiones variables o reversibles, que puede variar de manera continua la razón de transmisión,
[…]
Motor de tracción toroidal total, del 30 de Marzo de 2016, de Ultimate Transmissions Pty Ltd: Un motor de tracción toroidal de velocidad variable que comprende un disco de accionamiento y un disco accionado , teniendo dichos […]
Transmision de accionamiento rotativo, del 12 de Septiembre de 2012, de NASSIM, MICHAEL: Una transmisión de accionamiento rotativo que tiene una entrada de accionamiento rotativo y una salidarotativa impulsada , la […]
Sistema de control CVT, del 11 de Julio de 2012, de TOROTRAK (DEVELOPMENT) LIMITED: Un sistema para controlar una transmisión variable de forma continua que comprende un dispositivo devariación , un embrague de régimen bajo (CL), destinado […]
Mecanismo de accionamiento para transmisión infinitamente variable, del 27 de Junio de 2012, de TOROTRAK (DEVELOPMENT) LIMITED: Una transmisión de variador que comprende:
un alojamiento (H);
un árbol de entrada ;
un disco de entrada montado sobre el árbol de entrada […]
Variador, del 4 de Abril de 2012, de TOROTRAK (DEVELOPMENT) LIMITED: Un variador que comprende una primera y una segunda pista montadas para la rotación alrededor de un eje de variador y que tiene unas superficies opuestas rebajadas […]
TRASNSMISION TOROIDAL DE VARIACION CONTINUA, del 5 de Noviembre de 2009, de TOROTRAK (DEVELOPMENT) LIMITED: Una transmisión que comprende un variador toroidal con una primera y una segunda superficies de impulso espaciadas entre sí que definen una cavidad toroidal alrededor de un […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Transmision de accionamiento rotativo, del 12 de Septiembre de 2012, de NASSIM, MICHAEL: Una transmisión de accionamiento rotativo que tiene una entrada de accionamiento rotativo y una salidarotativa impulsada , la […]
Transmision de accionamiento rotativo, del 12 de Septiembre de 2012, de NASSIM, MICHAEL: Una transmisión de accionamiento rotativo que tiene una entrada de accionamiento rotativo y una salidarotativa impulsada , la […]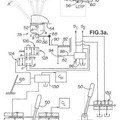 Sistema de control CVT, del 11 de Julio de 2012, de TOROTRAK (DEVELOPMENT) LIMITED: Un sistema para controlar una transmisión variable de forma continua que comprende un dispositivo devariación , un embrague de régimen bajo (CL), destinado […]
Sistema de control CVT, del 11 de Julio de 2012, de TOROTRAK (DEVELOPMENT) LIMITED: Un sistema para controlar una transmisión variable de forma continua que comprende un dispositivo devariación , un embrague de régimen bajo (CL), destinado […]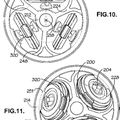 TRASNSMISION TOROIDAL DE VARIACION CONTINUA, del 5 de Noviembre de 2009, de TOROTRAK (DEVELOPMENT) LIMITED: Una transmisión que comprende un variador toroidal con una primera y una segunda superficies de impulso espaciadas entre sí que definen una cavidad toroidal alrededor de un […]
TRASNSMISION TOROIDAL DE VARIACION CONTINUA, del 5 de Noviembre de 2009, de TOROTRAK (DEVELOPMENT) LIMITED: Una transmisión que comprende un variador toroidal con una primera y una segunda superficies de impulso espaciadas entre sí que definen una cavidad toroidal alrededor de un […]