SISTEMA SENSOR PARA LA DETECCIÓN DE OBJETOS/OBSTÁCULOS EN PUNTOS CRÍTICOS DE LÍNEAS FÉRREAS.
Dispositivo sensor y procedimiento para detectar la presencia de cualquier tipo de objetos (vehículos,
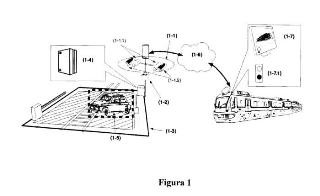
personas, animales, etc.) en puntos de interés del trazado ferroviario (pasos a nivel, túneles, etc.) y envío al tren de información visual y señales de aviso ante la presencia de objetos en los puntos de interés. El dispositivo está constituido por un conjunto de cámaras (1-1) ubicadas en el entorno de cada punto de interés, sistema de iluminación infrarroja (1-2), módulo de procesamiento de imágenes (1-4) y sistema inalámbrico de comunicaciones con el tren (1-6). El sistema contribuye al aumento de seguridad en el transporte por ferrocarril, proporcionando a los maquinistas información visual (1-7) sobre el estado de los puntos conflictivos y notificando de la presencia de obstáculos (1-5) en el entorno (1-3) del punto conflictivo. El sistema es capaz de detectar la presencia de objetos en condiciones de luz diurna y nocturna.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201000354.
Solicitante: UNIVERSIDAD DE ALCALA..
Nacionalidad solicitante: España.
Inventor/es: BRAVO MUÑOZ,IGNACIO, MAZO QUINTAS,MANUEL, MARRON ROMERA,MARTA, GARDEL VICENTE,ALFREDO, PIZARRO PÉREZ,DANIEL, RODRÍGUEZ SÁNCHEZ,FRANCISCO JAVIER, PALAZUELOS CAGIGAS,SIRA ELENA, JIMÉNEZ CABELLO,DAVID.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B61L23/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B61 FERROCARRILES. › B61L CONTROL DE TRAFICO FERROVIARIO; SEGURIDAD DEL TRAFICO FERROVIARIO (frenos o equipos auxiliares B61H, B61K; estructura de sistemas de agujas E01B). › Dispositivos de control, de aviso u otros dispositivos de seguridad a lo largo de la vía o entre los vehículos o los trenes.
- G06T7/00 FISICA. › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Fragmento de la descripción:
Sistema sensor para la detección de objetos/obstáculos en puntos críticos de líneas férreas.
Sector de la técnica
Esta invención tiene su aplicación dentro de la industria dedicada a la fabricación de equipos de seguridad del sistema de transporte ferroviario.
Estado de la técnica
El transporte por ferrocarril está adquiriendo cada día un mayor protagonismo a nivel mundial debido en gran medida a la apuesta que los diferentes países están haciendo por este medio de transporte. Entre las razones que justifican esta apuesta se encuentra la contribución del ferrocarril a la política de transporte sostenible, a la mejora de la competitividad y estabilidad económica de la industria y del sector ferroviario. Todo ello favorecido por la incorporación de nuevas tecnologías, que permiten cada día aumentar las prestaciones (seguridad, fiabilidad, etc.) de este tipo de transporte.
Ello hace que las empresas relacionadas con el transporte ferroviario estén cada día más interesadas en desarrollar tecnologías que permitan el incremento de la seguridad y confiabilidad. Un aspecto importante, dentro de este objetivo general, es la supervisión de puntos críticos dentro del trazado ferroviario (pasos a nivel, zonas de tránsito de personas, entradas/salidas de túneles, etc.) donde la presencia de objetos, personas, animales, etc., puedan suponer un peligro para ellos mismos y para los trenes en circulación.
Para cumplir con este objetivo se amplían los elementos que intervienen en la seguridad que hasta la actualidad han sido utilizados, principalmente, mecanismos de señalización y protección en las zonas próximas a las vías, añadiendo también información en tiempo real de la presencia de objetos en los pasos a nivel o similares a los maquinistas y con la suficiente antelación como para que éste pueda reaccionar a tiempo, aumentando con ello la seguridad del tráfico ferroviario.
Para que el maquinista pueda influir en la seguridad de una manera efectiva, necesita tener con suficiente antelación, debido a las grandes distancias de frenado que necesitan los trenes para su completa detención, información de los posibles riesgos o peligros que pueden generar un accidente, siendo posible entonces realizar las acciones correctoras pertinentes para que el accidente no llegue a producirse.
La combinación de cámaras de visión junto a los sistemas de procesamiento digital de imágenes constituye una de las configuraciones más ampliamente utilizadas en sistemas de vigilancia, ya que puede aportar una información amplia sobre los objetos captados e incluso puede avisar, de forma automática, de la presencia de nuevos objetos dentro de la escena. En añadido, una cámara es un sensor de los denominados pasivos (excepto que se use iluminación adicional), no generando ninguna emisión para realizar la detección de un objeto. El uso de cámaras puede destinarse exclusivamente para suministrar información visual a un operador, que ante la imagen determinará la existencia o no del objeto, sin usarse ningún tipo de procesamiento. Sistemas más desarrollados informan al operador del riesgo de existencia de objeto, y los más sofisticados funcionan autónomamente, generando alarmas cuando se detecta la presencia de un objeto, sin necesidad de una corroboración humana.
Una de las ventajas de esta propuesta frente a los sistemas basados en radar, es la posibilidad de detectar objetos de pequeño tamaño. Aunque la cámara es el sensor más parecido al ojo humano, presenta algunos problemas que a veces hacen descartar su uso. Uno de ellos es el gran volumen de datos que se maneja, lo cual genera en ocasiones tiempos de proceso elevados, perdiéndose eficiencia si se desea una respuesta inmediata del sistema de vigilancia. Otro problema vinculado a este sensor es la necesidad de iluminación adecuada. Por otra parte, se ve bastante afectado por la meteorología (lluvia, nieve, etc.), sobre todo si ésta no permite ver adecuadamente.
Dentro de los sistemas de visión artificial destinados a la detección de la presencia de objetos en puntos críticos de entornos ferroviarios, existen diversos proyectos y propuestas.
En [Vázquez et al., 2004] se propone el uso de dos cámaras, y mediante el análisis de componentes principales (PCA) se detectan objetos en movimiento. Aplicando la técnica PCA se crea un modelo de lo que es considerado fondo o escena sin obstáculos, de manera que las nuevas imágenes captadas de la escena se comparan con dicho modelo, pudiendo detectar por tanto la presencia de nuevos objetos en movimiento en el área analizada.
En [Masaru, 2004] se propone el uso de dos cámaras para la detección de objetos en pasos a nivel, y mediante técnicas estéreo detectar todo tipo de objetos.
El uso de geometrías estereoscópicas se hace necesario para determinar parámetros de distancia y altura respecto al plano de referencia (las vías del tren en este caso), esto incorpora en la medida del sistema un dato de ubicación 3D del objeto lo que puede resultar de interés si, por ejemplo, se desea tener una idea aproximada de la altura de los objetos.
La propuesta más actual viene marcada por el proyecto italo-israelí REOST (Railway Electro Optical System for Safe Transportation) [REOST, 2004], cofinanciado por la Unión Europea, y algunas empresas privadas del sector ferroviario. Según un informe de la propia Unión Europea [Bon et al., 2004], REOST ofrece un nuevo concepto en la seguridad en el ferrocarril, basado en la observación, niveles de alarma y decisión; proporcionando un sistema embarcado en tren para prevenir descarrilamientos u otro tipo de accidentes. En la misma línea que el anterior se enmarca el proyecto KOMPAS, financiado por el Fraunhofer Institute for Transportation Systems and Infrastructure Controls Engineering (IVI) [Ruder et al., 2003]. En este caso ubican tres cámaras en la cabina del tren: dos funcionando en estéreo para campo cercano, y otra cámara la usan para analizar el campo lejano. Además incorporan un radar infrarrojo (LADAR) capaz de detectar en un rango de 150 metros. Así mismo utilizan un GPS para informar de la ubicación y velocidad del tren. Según los autores pueden detectar objetos de 0.4 x 0.4 m de sección a 250 metros de distancia. En [Mockel et al., 2003] proponen la detección de obstáculos mediante cámaras y un LADAR embarcados. Según la información publicada, pueden detectar objetos a 400 metros del tren, y a una velocidad del mismo de 120 km/h. Mediante una cámara teleobjetivo, en [Ukai, 2004] pueden detectar objetos a una distancia de 600 metros del tren. En [Krishnaswami et al, 1998] se propone exclusivamente el uso de un LADAR para la detección de objetos. Este es un sistema medio-embarcado, ya que el emisor láser va en el tren, pero usa prolongaciones del láser mediante fibra óptica, a 5 km. de la posición del tren.
En lo concerniente específicamente a la detección de obstáculos en vía, actualmente, los pasos a nivel son las zonas sometidas a los más minuciosos estudios [HLGRS, 2003] [Shimazoe et al., 2001], y las técnicas de detección usadas en los mismos se trasladan al resto de áreas. Por otro lado, diversas compañías nacionales e internacionales aportan algunas soluciones, casi siempre basadas en un único tipo de sensores. Así, la compañía General Electric Transportation Rail [General Electric, 2005], propone un sistema radar para detectar objetos en pasos a nivel, basado en varias balizas emisoras y receptoras.
La empresa española LOGYTEL propone un sistema basado en mallas de fibras ópticas [LOGYTEL, 2005], instaladas en la parte superior y lateral de los pasos elevados y los túneles. La rotura de un módulo de la malla provoca la rotura del cable de fibra óptica, y el corte de la continuidad óptica provoca la generación de alarma. Su principio de funcionamiento es similar a la detección basada en hilos conductores. Una de las principales ventajas de este sistema es su inmunidad a la climatología y a las interferencias electromagnéticas. Debido a que el principio de detección se debe a la rotura de la malla, cada vez que se detecta la caída de un objeto se necesita realizar la reparación del sistema sensorial. Por otra parte, permite detectar que ha caído un objeto, pero no que el mismo se encuentra sobre las vías.
De los sistemas de detección de objetos en vías férreas vistos anteriormente, los que mejores prestaciones tienen son los basados en visión artificial, aunque presentan algunas limitaciones, entre...
Reivindicaciones:
1. Sistema sensor para la detección de objetos/obstáculos (1-5) en puntos críticos de líneas férreas compuesto por cuatro cámaras (1-1) (dos cámara en color para visión diurna (1-1.1) y dos en escala de grises con sensibilidad en el infrarrojo para visión nocturna (1-1.2)) y un sistema de iluminación infrarroja (1-2), en el que la detección se realiza a partir de algoritmos de procesamiento de imágenes.
2. Sistema sensor para la detección de objetos/obstáculos (1-5) en puntos críticos de líneas férreas según la reivindicación 1, que comprende medios para procesar las imágenes de cada par de cámaras de tal modo que la detección de obstáculos es posible ante cambios de iluminación en la escena, incorporando el conocimiento de la matriz de homografía correspondiente al plano del suelo de la escena, lo que permite evitar falsas alarmas debidas a la presencia de sombras originadas por las condiciones climatológicas y posibles elementos presentes en el entorno de la zona a vigilar (postes, árboles, etc.).
3. Sistema sensor para la detección de objetos/obstáculos (1-5) en puntos críticos de líneas férreas según la reivindicaciones 1 y 2, caracterizado por el envío de alarmas y posición de los obstáculos dentro de la zona a vigilar, a los trenes que circulen por las proximidades, mediante una red inalámbrica de transmisión de datos.
Patentes similares o relacionadas:
Procedimiento y dispositivo para la vigilancia de líneas y conexiones eléctricas en subestaciones de rectificación y en los tramos de línea correspondientes de ferrocarriles eléctricos, del 15 de Abril de 2020, de Elpro GmbH: Procedimiento para la vigilancia de líneas y conexiones eléctricas para verificar la seguridad operacional y personal en subestaciones de rectificación y en […]
Procedimiento y dispositivos para desactivar una medida de seguridad de un sistema de seguridad automático, del 18 de Marzo de 2020, de Thales Management & Services Deutschland GmbH: Procedimiento para el funcionamiento de un sistema de seguridad automático dentro de un sistema de seguridad de tren crítico para la seguridad, estando […]
Dron capacitado para la señalización y control del tráfico ferroviario, del 5 de Febrero de 2020, de IBAÑEZ DAVILA PONCE DE LEÓN, Rafael: 1. Dron capacitada para la señalización y control ferroviario , caracterizado porque integra en una carcasa , una pluralidad de componentes […]
Procedimiento y sistema de comunicación para el intercambio de información entre vehículos guiados, del 5 de Febrero de 2020, de Siemens Rail Automation S.A.U: Sistema RFID configurado para estar instalado a bordo de un primer vehículo guiado (A) con el fin de permitir a este último intercambiar información automáticamente con […]
Dispositivo para vigilar un dispositivo de emergencia en un vehículo ferroviario, del 25 de Diciembre de 2019, de BOMBARDIER TRANSPORTATION GMBH: Dispositivo para vigilar un dispositivo de emergencia en un vehículo ferroviario, que presenta - al menos un dispositivo de emergencia […]
Sistema y procedimiento para la evacuación de vehículos ferroviarios, del 24 de Octubre de 2019, de Siemens Mobility GmbH: Procedimiento para instalar automáticamente una zona de protección alrededor de un vehículo ferroviario en evacuación (Rail Vehicle in Evacuation) - en lo […]
Sistema, producto de programa informático y procedimiento para determinar la localización de un vehículo en relación con un punto de parada, del 9 de Octubre de 2019, de Siemens Mobility, Inc: Un sistema para determinar una localización de un vehículo en relación con un punto de parada designado, comprendiendo el sistema: un dispositivo de interfaz de usuario […]
Controlador de atracción virtual, del 25 de Abril de 2019, de Universal City Studios LLC: Un sistema de viaje, que comprende: un primer vehículo (11a) de viaje y un segundo vehículo (11b) de viaje posicionados dentro de un recorrido y configurados […]