MÉTODO DE PERFORACIÓN DE HUESO Y DISPOSTIVO PARA LLEVAR A CABO DICHA PERFORACIÓN.
Método de perforación de hueso y dispositivo para llevar a cabo dicha perforación,
comprende el método las etapas de:
- Enviar una señal de consigna a un actuador para avanzar a fuerza constante una herramienta a través del hueso a perforar.
- Medir continuamente mediante un sensor, al menos, un parámetro lineal del avance de la herramienta.
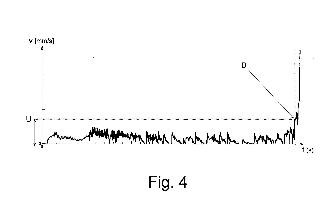
- Detectar un cambio en el parámetro lineal del avance de la herramienta cuando se sobrepasa un valor umbral (U), el cual es síntoma de que se ha detectado una transición entre diferentes capas del hueso.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201100444.
Solicitante: CENTRO DE ESTUDIOS E INVESTIGACIONES TÉCNICAS (CEIT) .
Nacionalidad solicitante: España.
Inventor/es: LOUREDO CASADO,Marcos, DÍAZ GARMENDIA,Iñaki, GIL NOBAJAS,Jorge Juan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/16 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 17/00 Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00). › Osteotomos; Taladros o cizallas para huesos; Trépanos.
- B23Q15/013 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 15/00 Control automático o regulación del movimiento de avance, de la velocidad de corte o de la posición tanto de la herramienta como de la pieza. › Control o regulación del movimiento de avance (B23Q 15/12 tiene prioridad).
Fragmento de la descripción:
MÉTODO DE PERFORACIÓN DE HUESO Y DISPOSITIVO PARA LLEVAR A CABO DICHA PERFORACIÓN
Sector de la técnica
La presente invención está relacionada con los dispositivos y procedimientos para llevar a cabo el taladrado quirúrgico de huesos, proponiendo un método que permite detectar de forma precisa el instante en que se atraviesan las distintas capas internas que
componen el hueso y por tanto pudiendo detectar el momento en que se produce el final de la perforación del hueso, así mismo la invención se refiere al dispositivo que se emplea para llevar a cabo la perforación automática del hueso.Estado de la técnica
Las operaciones de taladrado, fresado o corte de huesos son una práctica habitual en distintos campos de cirugía, como la cirugía ortopédica, cirugía de oído, cirugía maxilofacial, neurocirugía, u otro tipo de cirugías similares. Durante el procedimiento de perforación el cirujano emplea un taladro o dispositivo similar para hacer avanzar una herramienta a través del hueso. Esta operación es extremadamente delicada y requiere de gran precisión y exactitud para perforar únicamente la profundidad deseada, cualquier desviación en la perforación por pequeña que sea puede dañar el tejido circundante al hueso (venas, arterias, nervios, tejido cerebral, medula espinal) , lo cual puede provocar daños irreversibles al paciente.
La estructura de un hueso se constituye por una parte exterior densa y compacta, denominada hueso
cortical, y una parte interior menos densa, denominada hueso trabecular. Dependiendo del tipo de operación que se requiera la perforación del hueso puede consistir en atravesar únicamente la parte de hueso cortical, o atravesar todo el hueso, es decir tanto la parte de hueso cortical como la parte de hueso trabecular.
Para llevar a cabo la perforación de un hueso se conoce el empleo de taladros que disponen de una herramienta para incidir sobre el hueso, en estas soluciones el cirujano controla la velocidad de giro de la herramienta mediante un pedal o un botón de accionamiento, mientras que el movimiento de avance a través del hueso para realizar la perforación se lleva a cabo por una fuerza de empuje ejercida por el propio cirujano. El principal inconveniente de esta solución es que se desconoce el momento exacto en que se ha terminado de perforar el hueso, de manera que esta detección es función de la habilidad y experiencia del
cirujano.
Para intentar evitar un posible fallo humano que pueda afectar al tejido circundante al hueso, se han desarrollado soluciones basadas en el empleo de imágenes de rayos X, en donde el cirujano puede
observar en un monitor el avance de penetración de la herramienta a través del hueso que se perfora. El principal problema de esta solución reside en el excesivo aporte de radiación, tanto al cirujano como alpaciente, no permitiendo conocer además en tiempo real la posición de la herramienta, y con ello el punto en el que se debe finalizar el taladrado, pudiendo este hecho provocar daños en el tejido circundante al hueso.
Otras soluciones se basan en sistemas en donde el movimiento de rotación de la herramienta y el movimiento de avance de la misma son controlados, de manera que el cirujano posiciona el taladro en una
determinada posición y se comienza a perforar automáticamente.
Estas soluciones están basadas en sistemas en donde la herramienta avanza a velocidad constante y
para detectar el final del taladrado se usan sensores de fuerza asociados a la herramienta, que miden la fuerza de la resistencia al avance de la herramienta o el par de corte de la misma, de manera que cuando hay una variación en dichas señales de fuerza es síntoma de que se ha detectado una transición de una capa dura del hueso a una capa más blanda o viceversa. Al estar estos sensores de fuerza sobre, o próximos a, la herramienta, y debido a las vibraciones que en ésta se producen, las señales que se obtienen presentan mucho ruido lo cual dificulta la detección de la finalización del taladrado del hueso.
Se hace por tanto necesario un sistema que permita detectar de una manera sencilla y fiable el momento en el que se producen transiciones entre capas internas del hueso, pudiendo esto significar el final del
taladrado, evitando así que se puedan originar daños en el tejido circundante al hueso que puedan afectar al paciente.Objeto de la invención
De acuerdo con la presente invención se propone un método para la perforación de huesos y un dispositivo para llevar a cabo dicha perforación, en donde el avance de la herramienta para realizar la perforación
del hueso se realiza con una fuerza constante, de modo que cuando se detecta un cambio en la aceleración o en la velocidad de avance de la herramienta es síntoma de que se ha detectado una transición en el tejido óseo, es decir que se va a pasar de una capa de tejido más dura a otra más blanda o viceversa, pudiéndose determinar de forma precisa el final del taladrado del hueso sin afectar al tejido circundante.
El método de detección objeto de la invención se basa en realizar una medición de la posición de la herramienta mediante un sensor que va asociado a un actuador que provoca el avance de la herramienta, de manera que cuando se detecta una variación en la velocidad o en la aceleración de avance de laherramienta por encima de un determinado valor umbral es síntoma de que está próxima la transición entre diferentes capas del hueso, con lo cual se evita pasarse en la perforación y poder afectar al tejido circundante. Así mismo, al no estar midiendo sobre la propia herramienta con la que se realiza la perforación, se minimizan los ruidos provocados por las vibraciones de ésta y se obtiene una señal mucho más limpia que permite mejorar la detección. Resulta obvio para un experto en la técnica que, mediante un encoder, se puede medir la posición de la herramienta de corte o cualquiera de sus derivadas, ya sea velocidad o aceleración.
Concretamente el método de perforación de hueso objeto de la invención comprende las etapas de:
Enviar una señal de consigna al actuador para avanzar a fuerza constante la herramienta a través del hueso a perforar.
Medir continuamente mediante un sensor, al menos, un parámetro lineal del avance de la herramienta.
Detectar un cambio en el parámetro lineal del avance de la herramienta cuando se sobrepasa un determinado valor umbral, el cual es síntoma de que se ha detectado una transición entre diferentes capas de hueso. En función del valor umbral definido esta detección se puede corresponder con el final del taladrado del hueso.
Los parámetros lineales del avance de la herramienta que se miden mediante el sensor pueden ser la posición, la velocidad o la aceleración de la herramienta.Para llevar a cabo la perforación de hueso se emplea un dispositivo que está constituido por un primer actuador que acciona en rotación a la herramienta de perforación del hueso y un segundo actuador, independiente del primero y situado en una posición alejada de la herramienta, el cual por medio de una transmisión acciona el avance de la herramienta con una fuerza constante.
Asociado al segundo actuador se dispone un sensor que mide, al menos, un parámetro lineal del movimiento de avance de la herramienta, como puede ser la posición lineal, velocidad lineal o aceleración lineal de la herramienta, y asociado al primer actuador se dispone otro sensor que mide, al menos, un parámetro de rotación de la herramienta, como puede...
Reivindicaciones:
1. Método de perforación de hueso, que emplea un dispositivo que comprende un actuador que acciona el avance de una herramienta (2) a través del hueso a perforar, yendo asociado al actuador un sensor (7) que monitoriza el avance de la herramienta (2) , caracterizado porque comprende las etapas de:
Enviar una señal de consigna al actuador para avanzar a fuerza constante la herramienta (2) a través del hueso a perforar.
Medir continuamente mediante el sensor (7) , al menos, un parámetro lineal del avance de la herramienta (2) .Detectar un cambio en el parámetro lineal del avance de la herramienta ( 2) cuando se sobrepasa un valor umbral (U) , el cual es síntoma de que se ha detectado una transición entre diferentes capas del hueso.
2. Método de perforación de hueso, de acuerdo con la primera reivindicación, caracterizado porque los paramentos lineales del avance de la herramienta (2) que se miden mediante el sensor ( 7) son, la posición, la velocidad o la aceleración de la herramienta (2) .
3. Dispositivo para llevar a cabo una perforación de hueso según el método de las reivindicaciones anteriores, caracterizado porque está constituido por un primer actuador (1) que acciona en rotación a una herramienta (2) a través del hueso a perforar y un segundo actuador ( 3) ' independiente del primero y
situado en una posición alejada de la herramienta (2) , el cual por medio de una transmisión (4) acciona el avance de la herramienta (2) de corte con una fuerza constante, yendo asociado al segundo actuador (3) un sensor (7) que mide al menos un parámetro lineal del movimiento de avance de la herramienta (2) .
4. Dispositivo para llevar a cabo una perforación de hueso, de acuerdo con la tercera reivindicación, caracterizado porque la transmisión ( 4) está constituida por una guía (4. 1) sobre la que se mueve linealmente un carro (5) que porta la herramienta (2) y por un cable (4. 2) que se dispone tensado entre una polea (4.3) conducida y una polea (4.4) conductora que se mueve solidaria con un eje (3.1) del segundo actuador (3) .
5. Dispositivo para llevar a cabo una perforación
de hueso, de acuerdo con la tercera y cuarta reivindicaciones, caracterizado porque el primer actuador ( 1) está soportado por un brazo ( 9) que está
acoplado al carro (5) accionado por la transmisión ( 4) que provoca el avance de la herramienta (2) a través del hueso a perforar.
Patentes similares o relacionadas:
Mango médico con acoplamiento de seguridad neumático, del 22 de Julio de 2020, de AESCULAP AG: Mango médico para instrumentos médicos accionados hidráulica o neumáticamente con una parte de acoplamiento por el lado del mango para […]
Instrumento quirúrgico de mano, y una herramienta y un dispositivo de protección, del 15 de Julio de 2020, de Zastrow, Frank: Dispositivo quirúrgico dental de mano con una herramienta móvil , en donde se forma una zona de trabajo en un extremo distal de la herramienta y en donde […]
Sistema para preparar la tibia de un paciente en un procedimiento de reemplazo de articulación ortopédica, del 15 de Julio de 2020, de DePuy Ireland Unlimited Company: Un sistema de instrumentos quirúrgicos ortopédicos que comprende: un escariador quirúrgico que incluye un eje alargado y una pluralidad de estrías de […]
Herramienta de autoinjerto con un perfil acanalado mejorado y procedimientos de uso, del 1 de Julio de 2020, de HUWAIS IP HOLDING LLC: Un osteótomo giratorio , que comprende: una espiga que establece un eje longitudinal de rotación; un cuerpo que se extiende desde dicha espiga […]
Aparato para biopsia y aspiración de médula ósea, del 10 de Junio de 2020, de Teleflex Medical Devices S.à.r.l: Un conjunto acoplador que puede hacerse funcionar para enganchar de manera liberable un extremo de un árbol de accionamiento que se extiende […]
Sistema de lubricación y escape para un instrumento quirúrgico motorizado, del 13 de Mayo de 2020, de MEDTRONIC XOMED, INC.: Un sistema de lubricación para instrumentos quirúrgicos que comprende: un cartucho de lubricación ; un vástago que define una trayectoria primaria […]
Instrumento quirúrgico ortopédico, del 13 de Mayo de 2020, de DePuy Ireland Unlimited Company: Un montaje de instrumento quirúrgico ortopédico para preparar el fémur de un paciente en un procedimiento de reemplazo de rodilla, que comprende: […]
Fresa quirúrgica con depresiones no emparejadas, del 13 de Mayo de 2020, de MEDTRONIC PS MEDICAL, INC: Una herramienta de diseccion quirurgica para cortar hueso y otros tejidos, que comprende: - un vastago ; y - un cabezal de corte que se […]