MÁQUINA Y MÉTODO PARA EL LLENADO DE CAJAS CON CESTAS DE PRODUCTOS HORTOFRUTÍCOLAS PREENVASADOS.
Máquina y método para el llenado de cajas con cestas de productos hortofrutícolas preenvasados.
La máquina de la invención siendo del tipo de las que comprende una cinta (N) transportadora a través de la que llegan sucesivamente las cestas preenvasadas que van a disponerse en las cajas y un distribuidor (5) que toma unitariamente las cajas de una pila suspendida y las conduce hasta la estación en la que va a llenarse con dichas cestas preenvasadas, centra sus características en que las cestas llegan al interior de una caja ya agrupadas en una o más filas de longitud igual a la del lado de la caja paralelo a la fila mencionada, mientras que en el caso de formaciones con un número par de filas, éstas, juntas simultáneamente en el interior de dicha caja, pueden repartirse y clasificarse simultáneamente, según dos direcciones opuestas perpendiculares a las filas mencionadas, con el fin de disponer las cestas debajo de posibles salientes que sobresalen horizontalmente del borde de la caja o incluso para despejar la zona central del fondo en la que se van a recibir filas de cestas posteriores.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200901010.
Solicitante: REV PACKAGING SOLUTIONS S.R.L.
Nacionalidad solicitante: Italia.
Dirección: Via Ferruccio Parri 745 Pievesestina di Censena (FC) ITALIA.
Inventor/es: ANTONACCI,NICOLA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B5/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 5/00 Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros. › Embalaje de grupos de objetos, cada grupo siendo tratado como un solo objeto.
- B65B5/08 B65B 5/00 […] › Embalaje de grupos de objetos, siendo cada grupo sujetado o guiado individualmente para ser transferido al receptáculo o recipiente.
- B65B5/10 B65B 5/00 […] › Llenado de receptáculos o recipientes, progresivamente o por etapas sucesivas, introduciendo sucesivamente los objetos o capas de objetos.
Fragmento de la descripción:
Máquina y método para el llenado de cajas con cestas de productos hortofrutícolas preenvasados.
La presente invención se refiere a una máquina y a un método, ideados para llenar automáticamente cajas o bandejas de cualquier material (madera, plástico, cartón) con cestas preenvasadas de frutas y hortalizas.
Actualmente, según uno de los métodos de llenado de cajas más difundidos, las cestas, ya enmalladas y alineadas a lo largo del plano inclinado de un canal de descarga o de una cinta transportadora, llegan sucesivamente de una en una directamente al interior de la caja en la que, tras completarse cada fila, se desplazan transversalmente para permitir la formación de las filas sucesivas.
Otro método de llenado prevé que dos paletas opuestas tomen en parejas las filas de cestas ya formadas y las transporten hasta encima de la caja, en la que las depositan por caída abriéndose hacia la parte inferior.
El problema observado en ambos modos de funcionamiento mencionados anteriormente se encuentra en el vuelco de algunas cestas al llegar a la caja y la presencia necesaria de alguna persona que las recoloque en el momento oportuno de modo que no obstaculice a las siguientes cestas.
Es objetivo de la presente invención solucionar tal inconveniente a través de una máquina y un método con los que poder obtener el llenado automático de las cajas de un modo rápido y seguro, es decir, con una elevada producción por hora y sin los obstáculos provocados actualmente por el frecuente vuelco de las cestas.
Tal invención prevé en general que las cestas lleguen al interior de una caja o bandeja ya agrupadas en una o más filas de longitud igual a la del lado de la caja paralelo a la fila o a las filas mencionadas y que, en el caso de formaciones con un número par de filas, éstas, juntas simultáneamente en el interior de dicha caja, puedan repartirse y clasificarse simultáneamente, según dos direcciones opuestas perpendiculares a las filas mencionadas, con el fin de disponer las cestas por debajo de posibles salientes que sobresalen horizontalmente del borde de la caja hacia el interior o incluso solamente para despejar la zona central del fondo permitiéndose la llegada de filas posteriores de cestas.
Éstas y otras características de la presente invención se describen a continuación con ayuda de once ilustraciones de dibujo en las que, únicamente a título indicativo y no limitativo, se representan:
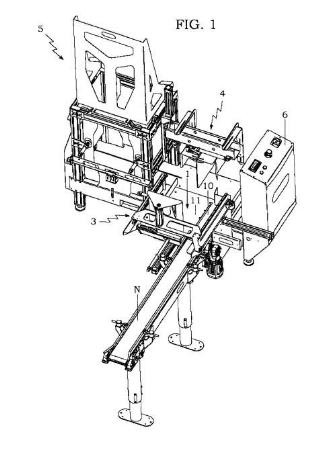
la figura 1 que muestra, según una vista axonométrica desde arriba, la máquina ideada en su conjunto y desde el lado de llegada de las cestas preenvasadas;
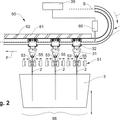
la figura 2 que muestra, según una vista axonométrica desde arriba, la máquina de la figura 1 desde el lado de salida de las cajas llenas;
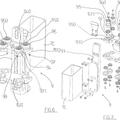
las figuras 3, 4, 5, 6, 7 y 8, muestran las partes más significativas y el funcionamiento del grupo equipado para disponer las cestas en formaciones y para descargar dichas formaciones en la caja que va a llenarse;
las figuras 9, 10 y 11, muestran la conformación y el funcionamiento del grupo equipado para dirigir la descarga de cada formación de cestas en la caja y para clasificar, cuando es necesario, las filas;
las figuras 12, 13, 14, 15, 16, 17, 18, 19, 20 y 21 muestran esquemáticamente algunas etapas del método de llenado ideado.
A partir de los dibujos adjuntos y en particular de las figuras 1 y 2 que muestran dos vistas de la máquina en su conjunto, se deduce que los dos grupos que constituyen el núcleo de la máquina, estando directamente antepuestos al llenado de las cajas, (grupo 3 de las figuras 3, 4, 5, 6, 7, 8 y grupo 4 de las figuras 9, 10, 11) , actúan conjuntamente con una cinta N transportadora de las cestas C preenvasadas y un distribuidor 5 de tipo conocido que toma cada vez la primera caja en la parte inferior de una pila suspendida y la conduce hasta la estación de llenado.
Examinando en detalle dicho grupo 3 de las figuras 3, 4, 5, 6, 7 y 8, el destinado a agrupar las cestas que van a descargarse simultáneamente en la caja que va a llenarse, se observa que el plano 11 horizontal sobre el que se disponen previamente dichas formaciones, es adyacente y coplanario al carril 10 situado en línea con la cinta N transportadora (figura 1) de las cestas preenvasadas entrantes.
Dicho carril 10 está definido a los lados por una placa 21 que, accionada por un gato propio, se oculta desplazándose verticalmente, y por una placa 20 cuyos desplazamientos horizontales, por efecto del gato 200, permiten, habiendo bajado previamente dicha placa 20, el traslado transversal de cada fila de cestas formada por la detención contra la pared 12 regulable. A la placa 20, que moviéndose horizontalmente libera el carril 10 empujando transversalmente sobre el plano 11 cada fila formada, se opone la placa 22 que, regulable gracias al gato 220 propio, permite centrar cada formación de cestas con respecto a la caja precedente y a los órganos que deben efectuar el traslado, es decir, el órgano 34 de empuje, que se desplaza horizontalmente por efecto del gato 350 y verticalmente por efecto del gato 340, así como la pala 36 bifurcada que, alojada debajo del plano 11 y accionada por el gato 360 propio, se extiende sobresaliendo horizontalmente desde dicho plano para recibir la formación de cestas que van a dejarse caer después en la caja subyacente simplemente retrayéndose con respecto a las cestas y al órgano 34 de empuje contra el que se apoyan.
Justo durante la descarga de la formación de cestas en la caja que va a llenarse, dicho grupo 3 actúa conjuntamente con el grupo 4 de las figuras 9, 10 y 11 que comprende un par de elementos 40 que, conformados cada uno a modo de canal invertido que tiene una pared vertical de longitud mayor con respecto a la pared opuesta y paralela, están dispuestos con las paredes más largas enfrentadas entre sí. Dichos elementos 40, cuando es necesario, se mueven horizontal y simultáneamente, accionados cada uno por un cilindro 400 hidráulico o neumático propio solidario a una estructura 41 de soporte, con movimientos lineales opuestos para alejarse o para acercarse.
Siguiendo el orden de los dibujos esquemáticos que de la figura 12 a la figura 21, estos muestran otras tantas etapas del funcionamiento de la máquina. Se deduce que las cestas C portadas por la cinta N transportadora llegan sobre el carril 10 de llegada de la estación 1 de agrupamiento formando, entre el órgano 20 de empuje y la placa 21 ocultable verticalmente, una fila de longitud igual al lado de la caja que va a llenarse paralelo a la fila mencionada. En este caso, cada fila está formada por dos cestas, la primera de las cuales se detiene frontalmente contra un elemento 12 regulable.
Completada la primera fila de dos cestas (figuras 12 y 13) , un temporizador de tipo conocido, no representado en las figuras y situado al final de la cinta N, detecta la detención de la tercera cesta y ordena la breve inversión de la rotación de la cinta N para distanciar la tercera cesta de la que le precede, en este tiempo la placa 21 vertical se desliza por debajo del plano 11 horizontal para permitir al elemento 20 empujar transversalmente la primera fila de cestas hasta liberar el carril 10 y permitir la formación de la fila siguiente, habiendo retornado previamente el elemento 20 de empuje en posición lateral deslizada y habiendo salido previamente la placa 21 para la retención de las nuevas cestas entrantes.
Para limitar los tiempos muertos y acelerar la producción, la dimensión en altura de la placa 21 y la conformación del elemento 20 de empuje son tales que permiten a este último sobrepasar la placa 21 cuando se encuentra elevada (figuras 4, 5, 6, 7y8) .
Tal como se deduce a partir de la figura 14, la segunda fila de cestas se empuja por el elemento 20 hasta que se apoya contra la fila precedente y junto a ésta continúa hasta el contacto de dicha primera fila contra la placa 22 regulable que actúa conjuntamente con el elemento 20 para centrar la formación de las dos filas de cestas con respecto a la caja P1 situada enfrente y a un nivel más bajo en la estación de llenado.
El órgano 34 de empuje se activa (figura 15) para empujar las dos filas de cestas hacia el interior de los túneles 40 del grupo 4 y por encima de la pala 36 bifurcada, que ya ha salido de debajo del plano 11 hasta disponerse por debajo de dichos túneles de los que ensarta las paredes más largas en contacto.
Dicha formación de cestas...
Reivindicaciones:
1. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, del tipo que comprende una cinta (N) transportadora u otro medio equivalente a través del que llegan sucesivamente las cestas preenvasadas que van a disponerse en las cajas y un distribuidor (5) de tipo conocido que toma una caja cada vez del fondo de una pila suspendida y la conduce hasta la estación en la que va a llenarse con dichas cestas preenvasadas, caracterizada porque las cestas llegan al interior de una caja o bandeja ya agrupadas en una o más filas de longitud igual a la del lado de la caja paralelo a la fila o a las filas mencionadas y porque, en el caso de formaciones con un número par de filas, éstas, juntas simultáneamente en el interior de dicha caja, pueden repartirse y clasificarse simultáneamente, según dos direcciones opuestas perpendiculares a las filas mencionadas, con el fin de disponer las cestas debajo de posibles salientes que sobresalen horizontalmente del borde de la caja o incluso para despejar la zona central del fondo en la que se van a recibir filas de cestas posteriores.
2. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 1, caracterizada porque comprende un grupo (3) equipado para disponer las cestas en formaciones y para descargar dichas formaciones en la caja que va a llenarse.
3. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 1, caracterizada porque comprende un grupo (4) equipado para guiar la descarga de cada formación de cestas en la caja y para clasificar, cuando es necesario, las filas.
4. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 2, caracterizada porque dicho grupo (3) comprende un carril (10) de llegada de las cestas desde la cinta (N) transportadora y de formación de cada fila de cestas, teniendo dicho carril una longitud igual al menos a la del lado de la caja paralelo al propio carril.
5. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 4, caracterizada porque dicho carril (10) de llegada está delimitado frontalmente por un elemento (12) de detención de las cestas haciendo tope.
6. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 5, caracterizada porque dicho elemento (12) de detención es regulable.
7. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 4, caracterizada porque dicho carril (10) de llegada está delimitado lateralmente por un elemento (20) de empuje y por una placa (21) ocultable verticalmente, accionándose ambos por cilindros hidráulicos o neumáticos.
8. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 7, caracterizada porque, para limitar los tiempos muertos y acelerar la producción, la dimensión en altura de la placa
(21) y la conformación del elemento (20) de empuje son tales que permiten a este último sobrepasar la placa (21) cuando se encuentra elevada.
9. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según las reivindicaciones 4 y 7, caracterizada porque dicha placa (21) ocultable verticalmente separa dicho carril (10) de un plano (11) de agrupamiento en el que las cestas se disponen en formaciones.
10. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 9, caracterizada porque dicho plano (11) de agrupamiento está delimitado, por la parte opuesta a la placa (21) , por una placa (22) regulable que, accionada por un cilindro hidráulico o neumático propio, actúa conjuntamente con el elemento (20) de empuje para centrar la formación de cestas con respecto a la caja que va a llenarse.
11. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según las reivindicaciones9y10, caracterizada porque debajo de dicho plano (11) de agrupamiento se encuentra alojada una pala (36) bifurcada que, cuando es necesario, se extiende sobresaliendo horizontalmente desde tal plano (11) disponiéndose por encima de la caja que va a llenarse situada a un nivel más bajo en la estación de llenado.
12. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 11, caracterizada porque un órgano (34) de empuje que forma parte del grupo (3) se desplaza horizontalmente, accionado por un cilindro (350) hidráulico o neumático, para empujar una formación de cestas hasta encima de la pala
(36) bifurcada y se desplaza verticalmente, accionado por un cilindro (340) hidráulico o neumático, para sobrepasar las cestas ya colocadas detrás.
13. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 3, caracterizada porque dicho grupo (4) comprende un par (40) de elementos que tienen al menos una pared vertical dispuesta en una posición tal que dichas paredes se sitúan paralelas entre sí.
14. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según la reivindicación 13, caracterizada porque dichas paredes se alejan o entran en contacto respectivamente cuando dichos elementos (40) se mueven horizontal y simultáneamente con movimientos lineales opuestos para alejarse o para acercarse, accionándose cada uno por un cilindro (400) hidráulico o neumático propio.
15. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según las reivindicaciones 11 a 14, caracterizada porque cuando la pala (36) bifurcada se extiende sobresaliendo horizontalmente desde el plano (11) , se dispone debajo del par (40) de elementos, de manera precisa, y si están en contacto ensarta las paredes verticales mientras que, si están en posición abierta, se dispone entre dichas paredes verticales.
16. Máquina para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, según las reivindicaciones 13 y 14, caracterizada porque los elementos (40) , tanto cuando están en contacto como cuando se encuentran en posición abierta, están cerrados frontalmente, por la parte opuesta a la entrada de las cestas, por un elemento (43) de detención haciendo tope de las propias cestas.
17. Método para el llenado de cajas con cestas de productos hortofrutícolas preenvasados, caracterizado porque comprende las siguientes etapas:
1. elevar la placa (21) ocultable verticalmente que delimita el carril (10) de llegada de las cestas y colocar la placa (22) regulable en la posición de retención de la dimensión de una primera formación de cestas;
2. formar sobre el carril (10) de llegada, alimentado por una cinta (N) transportadora, una fila de cestas (C) igual al lado de la caja (P) que va a llenarse paralelo a la fila mencionada;
3. invertir brevemente el sentido de rotación de la cinta (N) transportadora cuando se ha compuesto dicha fila, con el fin de distanciar la última cesta de la siguiente en llegar;
4. bajar la placa (21) ocultable hasta deslizarse por debajo del plano (11) de agrupamiento;
5. accionar el elemento (20) de empuje para empujar transversalmente la fila de cestas fuera del carril (10) de llegada;
6. subir la placa (21) ocultable y retirar el elemento (20) de empuje;
7. formar sobre el carril (10) de llegada una fila de cestas (C) igual a la fila anterior recién formada;
8. invertir brevemente el sentido de rotación de la cinta (N) transportadora cuando se ha compuesto dicha fila, con el fin de distanciar la última cesta de la siguiente en llegar;
9. bajar la placa (21) ocultable hasta deslizarse por debajo del plano (11) de agrupamiento;
10. accionar el elemento (20) de empuje para empujar transversalmente la fila de cestas contra la fila anterior en espera y continuar hasta encontrarse esta última con la placa (22) regulable;
11. provocar la salida de la pala (36) bifurcada por encima de la caja (P) que va a llenarse;
12. accionar el grupo (34) empujador para empujar la formación de las cestas sobre la pala (36) y hacia el interior de dos elementos (40) a modo de túnel en contacto hasta la detención contra un elemento (43) frontal;
13. subir la placa (21) ocultable y retirar el elemento (20) de empuje;
14. retirar la pala (36) bifurcada de debajo de las cestas provocando la caída al interior de la caja (P) subyacente que va a llenarse;
15. distanciar las filas de cestas empujándolas hacia los dos lados opuestos de la caja mediante las paredes verticales de los dos elementos (40) accionados simultáneamente y de manera opuesta cada uno por un actuador hidráulico o neumático propio;
16. agrupar sobre el plano (11) tres filas paralelas de cestas repitiendo las etapas (2) a (10) ;
17. elevar la placa (34) por encima de la dimensión de las filas de cestas mediante un actuador hidráulico o neumático y devolverla elevada a su posición inicial sobre las cestas;
18. bajar la placa (34) ;
19. provocar la salida de la pala (36) bifurcada por encima de la caja (P) que va a llenarse;
20. accionar dicha placa (34) para hacer avanzar la formación de las cestas sobre la pala (36) y hasta encontrarse con el elemento (43) de detención;
21. retirar repentinamente la pala (36) bifurcada de debajo de las cestas provocando la caída al interior de la caja (P) subyacente y de manera precisa en la zona definida por las dos paredes de mayor longitud de los elementos (40) que siguen abiertos;
22. elevar dichos elementos (40) para salir de la dimensión de la caja llena;
23. quitar dicha caja y colocar la siguiente caja vacía.
Patentes similares o relacionadas:
 Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Procedimiento para la apertura automática de un medio de soporte, así como un dispositivo para la realización del procedimiento, del 24 de Junio de 2020, de FERAG AG: Procedimiento para la apertura automática de medios de soporte y la puesta a disposición de los medios de soporte en medios auxiliares de carga y de transporte […]
Casete de medicamentos y aparato automático de empaquetado de medicamentos con el mismo, del 27 de Mayo de 2020, de JVM Co., Ltd: Un casete de medicamentos para suministrar automáticamente medicamentos de acuerdo con la información de la prescripción, comprendiendo el casete de medicamentos : un […]
Máquina encajadora de monodosis, del 11 de Marzo de 2020, de IMASDE EXTREMADURA S.L: La máquina encajadora de monodosis está diseñada para realizar el encajado de envases de tipo monodosis de distintos formatos en cajas vacías […]
MÁQUINA DE EMPAQUETADO DE TUBOS CILÍNDRICOS Y PROCESO DEEMPAQUETADO, del 11 de Marzo de 2020, de AKYUREK KARDESLER TARIM URUNLERI MAKINALARI TASIMACILIK VE MADENCILIK SANAYI TICARET LIMITED SIRKETI, SUCURSAL EN ESPAÑA: Máquina de empaquetado de tubos cilíndricos y proceso de empaquetado que se lleva a efecto con dicha máquina, destinada a introducir un conjunto de tubos […]
 Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Un dispositivo de transporte para transportar un elemento de recipiente para recibir artículos farmacéuticos desde una máquina contadora hasta el interior de recipientes de avance continuo, del 29 de Enero de 2020, de MARCHESINI GROUP S.P.A.: Un dispositivo de transporte para transportar un elemento (TC) de recipiente para recibir y transferir artículos, caracterizado por que comprende:
[…]
Dispositivo de envasado de blíster y procedimiento de envasado de blíster, del 11 de Diciembre de 2019, de JVM Co., Ltd: Dispositivo de envasado de blíster que comprende: un bastidor ; una tolva principal unida al bastidor y configurada para recibir comprimidos; un módulo […]
Máquina empaquetadora para morriones de alambre, del 20 de Noviembre de 2019, de GEFIN, S.R.L.: Una máquina empaquetadora para morriones de alambre en contenedores que tienen formas diferentes y predeterminadas, incluyendo: - una estructura de […]
Máquina de embalar, del 20 de Noviembre de 2019, de Mad Automation SRL: Máquina de embalar que comprende: - un transportador de entrada para transportar productos para su embalaje a lo largo de una dirección de desplazamiento […]