Procedimiento para la determinación de distancia y la visualización, así como sistema de medición de distancia, en especial para la asistencia en la instalación de un puente.
Procedimiento para la instalación de un puente con la ayuda de un sistema de medición (100,
101, 102) sobre un vehículo (3) con las siguientes etapas de:
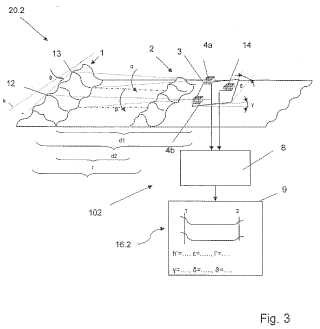
- determinación de la distancia (d1, d2) del terreno opuesto (1) respecto al menos a dos escáneres láser (4a, 4b) que exploran en vertical y están colocados a una distancia definida entre sí en el vehículo,
- determinación de al menos dos ángulos (α, β) entre el contorno de terreno (1) y un suelo (21), del que está separado el sistema de medición (101, 102),
- procesamiento de estos datos en una unidad de procesamiento y evaluación de datos (8) para la
- determinación de un desplazamiento en altura (h') y/o un ángulo de inclinación (δ) entre el vehículo (3) y el terreno opuesto (1),
- determinación de una inclinación transversal respecto a la horizontal (h) a partir de un ángulo de torsión (ε) entre el vehículo (3) y el terreno opuesto (1), así como un ángulo de inclinación (δ) del vehículo (3) respecto al suelo (21), estableciéndose la relación con la horizontal (h) mediante un indicador de inclinación (14), y
- representación horizontal del terreno (1) como corte de terreno (16.1, 16.2) en el monitor (9).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06003552.
Solicitante: RHEINMETALL LANDSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: DR.-HELL-STRASSE 24107 KIEL ALEMANIA.
Inventor/es: KRUTZFELDT, MANFRED, BRUHN,RALF, Wende,Wolfram.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C15/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Instrumentos o accesorios topográficos no previstos en los grupos G01C 1/00 - G01C 13/00.
- G01S17/42 G01 […] › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › Medida simultánea de la distancia y de otras coordenadas (medida indirecta G01S 17/46).
- G01S17/87 G01S 17/00 […] › Combinaciones de sistemas que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2384981_T3.pdf
Fragmento de la descripción:
Procedimiento para la determinación de distancia y la visualización, así como sistema de medición de distancia, en especial para la asistencia en la instalación de un puente Los sistemas de medición de distancia son conocidos tanto del sector civil como militar, por ejemplo, el taquímetro para mediciones topográficas, los sistemas combinados, como los descritos en la página web http://www.fischingermessen.de/kap12.pdf, los medidores de distancia por láser, por ejemplo, de la empresa Zeiss, que están disponibles también con visión de cámara, visión nocturna y visión de infrarrojos.
Los sistemas militares de medición de distancia se basan generalmente en un rayo láser no detectable, a menudo en combinación con medios de visualización ópticos directos o sistemas de cámara que pueden visualizar el objetivo enfocado. Un sistema de detección manual con medidor de distancia ya fue presentado en el Primer Simposio Europeo de Armas No Letales que tuvo lugar del 25 al 26 de septiembre de 2001 en Ettlingen y el Instituto Fraunhofer de Tecnología Química lo dio a conocer en el folleto "1st European Symposium on Non-Lethal Weapons" en las páginas 6-2 a 6-12. Aunque estos sistemas tienen una buena precisión, no permiten determinar y visualizar a continuación en especial el contorno de un terreno.
Del documento DE10033873A1 se conoce un procedimiento para la medición y la cartografía automáticas de perfiles de terrenos y espacios mediante un medidor óptico rotativo de distancia con control angular y mediante un procesamiento informatizado de los datos de medición. En este caso, un medidor óptico de distancia está dispuesto de forma giratoria en dirección horizontal y opcionalmente en dirección vertical. Mediante un control de motor paso a paso o un decodificador angular, el medidor de distancia se puede situar en una posición angular exacta y puede determinar los datos de medición. De este modo se pueden calcular y visualizar y/o almacenar geometrías bidimensionales o tridimensionales de los objetos de medición. Durante el movimiento giratorio se ejecutan mediciones continuas en distintas posiciones de medición. Las propias posiciones de medición se almacenan como informaciones complementarias de los respectivos datos de medición de un espacio. A continuación se crea el dibujo de conjunto mediante el uso de los valores de medición y los parámetros del lugar correspondientes.
En el documento WO90/12330A se da a conocer un medidor manual de distancia por láser. El dispositivo comprende un medidor de inclinación para medir la inclinación del aparato respecto a la horizontal. El dispositivo se usa para medir una pared de roca. La pared de roca mediante la medición de la distancia y los ángulos de inclinación correspondientes para una serie de puntos a lo largo de una vertical y este proceso se repite para una serie de posiciones a lo largo de la longitud. La posición de los perfiles se deriva de las posiciones de perforaciones deseadas o reales. Estos datos se almacenan en una memoria. Con ayuda de un software se genera un modelo tridimensional de la pared de roca, a partir del que se pueden generar vistas isométricas desde cada perspectiva, así como secciones transversales verticales y horizontales, junto con los datos numéricos correspondientes.
El documento WO00/25089A se refiere a un dispositivo y un procedimiento para la generación de una imagen en 3D
para el uso en la medición. El dispositivo comprende un aparato reproductor de imágenes, un medidor de distancia, así como una unidad de procesamiento, conteniendo el aparato generalmente un aparato de visualización. El aparato se puede pivotar e inclinar mediante una unidad de movimiento vertical y horizontal (pan/tilt) . El dispositivo contiene además sensores, como el sensor de brújula e inclinación, para medir el ángulo de posición e inclinación respecto al objetivo. Mediante la imagen digitalizada y las coordenadas X-Y se crean a continuación coordenadas 45 tridimensionales, de modo que se puede generar una imagen tridimensional del objetivo. Con distintas tomas en ángulos diferentes se pueden realizar también representaciones en 360º con el software.
Por tanto, la invención tiene el objetivo de proporcionar un procedimiento y un sistema de medición que con medios simples posibiliten una exploración, así como una visualización como contorno de terreno en una pantalla. Como 50 variante del objetivo, estas informaciones sirven especialmente para la asistencia en la instalación de un puente mediante unidades de zapadores.
Este objetivo se consigue mediante las características contenidas en las reivindicaciones 1 y 7.
55 En las reivindicaciones secundarias aparecen realizaciones ventajosas.
La invención se basa en principio en la idea de explorar sobre la base de al menos un medidor de distancia comercial un terreno situado delante de un sistema de medición, por ejemplo, una orilla opuesta, el talud de una orilla, una acequia, etc., y visualizar a continuación esta exploración como corte de terreno o en corte lateral en un monitor. A fin de poder tener en cuenta en la representación un desplazamiento en altura entre el lugar de medición o el sistema de medición y el terreno escaneado se determina además un ángulo entre el lugar de medición y el contorno del terreno. El contorno del terreno representado en el monitor se puede proveer a continuación, con preferencia de manera automática, de marcas de medición de distancia. Los sistemas de medición sirven para visualizar contornos de terrenos y para determinar zonas adecuadas de montaje para la instalación militar de puentes especialmente con protección blindada.
Como medidor de distancia preferido resulta adecuado un medidor de distancia por láser. El sistema láser de espejo rotatorio explora el terreno en vertical. La reflexión se representa a continuación en un corte de terreno escalable.
En otro paso de medición se puede determinar y visualizar también o al menos considerar la inclinación transversal y/o la inclinación longitudinal del sistema de medición respecto al terreno escaneado o a la inversa. En una realización muy simple se puede ajustar la inclinación transversal mediante cruz horizontal en una escuadra óptica. En otra etapa de construcción, la inclinación transversal del terreno que se va a explorar se puede determinar alternativamente con (otro) explorador láser montado a una distancia definida y visualizar en el monitor.
Para tener en cuenta una posible inclinación longitudinal del sistema de medición se puede usar un sensor óptico u otro indicador angular.
En el caso especialmente de un vehículo lanzapuentes blindado se ha comprobado que es conveniente medir previamente la zona de instalación del puente y tener en cuenta en la instalación un desplazamiento en altura entre el vehículo o el sistema de medición situado encima y el terreno, así como la inclinación transversal y/o longitudinal del vehículo y también una torsión del terreno respecto al vehículo. Mediante la aplicación del procedimiento descrito, estos datos de medición se visualizan como corte lateral o corte de terreno en el monitor del comandante y/o del conductor, de modo que sobre la base de los datos de medición o de la indicación en el monitor se puede decidir si y/o cómo se puede ejecutar el proceso de instalación del puente.
A tal efecto, el proceso de medición se inicia después de la aproximación a un punto de montaje del puente. La medición o exploración vertical del terreno (orilla, taludes, colinas, terraplenes, etc.) se registra, se calcula y se visualiza. El contorno del terreno se representa preferentemente con una línea horizontal, así como con la línea del plano del vehículo. Las líneas de distancia se visualizan además en vertical. Junto con los indicadores de inclinación longitudinal/transversal en o junto al vehículo se puede representar también visualmente la propia inclinación del vehículo en relación con el posible proceso de instalación del puente.
Ha resultado ventajoso o suficiente colocar los dos sensores escáner en el vehículo a una distancia entre sí de 3 m aproximadamente si se usan dos escáneres. Esto se puede llevar a cabo principalmente en la zona del frontal del vehículo.
La solución explicada con medios simples tiene la ventaja de que con uno o varios sistemas de medición por láser, preferentemente comerciales, se puede determinar de forma rápida y definida la distancia y el contorno de una orilla o terreno opuesto. Se puede prescindir de recorrer los... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la instalación de un puente con la ayuda de un sistema de medición (100, 101, 102) sobre un vehículo (3) con las siguientes etapas de:
- determinación de la distancia (d1, d2) del terreno opuesto (1) respecto al menos a dos escáneres láser (4a, 4b) que exploran en vertical y están colocados a una distancia definida entre sí en el vehículo,
- determinación de al menos dos ángulos (a, 1) entre el contorno de terreno (1) y un suelo (21) , del que está separado el sistema de medición (101, 102) ,
- procesamiento de estos datos en una unidad de procesamiento y evaluación de datos (8) para la
- determinación de un desplazamiento en altura (h') y/o un ángulo de inclinación (£) entre el vehículo (3) y el terreno opuesto (1) ,
- determinación de una inclinación transversal respecto a la horizontal (h) a partir de un ángulo de torsión (.) entre el vehículo (3) y el terreno opuesto (1) , así como un ángulo de inclinación (5) del vehículo (3) respecto al suelo (21) , estableciéndose la relación con la horizontal (h) mediante un indicador de inclinación (14) , y
- representación horizontal del terreno (1) como corte de terreno (16.1, 16.2) en el monitor (9) .
2. Procedimiento según la reivindicación 1, caracterizado por
- la determinación de una inclinación longitudinal (y) del vehículo (3) respecto al suelo (21) .
3. Procedimiento según las reivindicaciones 1 ó 2, caracterizado porque la distancia en altura entre el sistema de medición (100, 101, 102) y el suelo (21) está presente como magnitud conocida en la unidad de procesamiento y evaluación de datos (8) .
4. Procedimiento según cualquiera de las reivindicaciones 1 a 3, caracterizado porque el contorno de terreno (1, 20, 20.1) , representado en el monitor (9) , está provisto de marcas de medición de distancia.
5. Procedimiento según cualquiera de las reivindicaciones 1 a 4, caracterizado porque sobre la base de los datos de medición o la indicación del monitor se decide si se ejecuta un proceso de instalación de puente.
6. Procedimiento según la reivindicación 5, caracterizado porque en caso de excederse un intervalo angular permitido no se ejecuta el proceso de instalación.
7. Sistema de medición (100) para la ejecución del procedimiento según cualquiera de las reivindicaciones 1 a 6, que presenta al menos dos escáneres láser (4, 4a, 4b) , una unidad de procesamiento y evaluación de datos (8) , así como al menos un monitor (9) .
8. Sistema de medición según la reivindicación 7, caracterizado por un sensor (14) como indicador angular combinado y/o un sistema óptico de medición (5) .
9. Sistema de medición según la reivindicación 7 u 8, caracterizado porque los escáneres láser (4, 4a, 4b) son medidores por láser con un sistema láser de espejo rotativo.
10. Sistema de medición según cualquiera de las reivindicaciones 7 a 9, caracterizado porque el monitor
(9) es un aparato de visualización.
11. Sistema de medición según cualquiera de las reivindicaciones 7 a 10, caracterizado porque el vehículo es un vehículo lanzapuentes blindado.
12. Sistema de medición según cualquiera de las reivindicaciones 7 a 11, caracterizado porque si se usan dos escáneres (4, 4a, 4b) , estos están colocados en el vehículo a una distancia entre sí de 3 m aproximadamente.
13. Sistema de medición según cualquiera de las reivindicaciones 7 a 12, caracterizado po rque el sistema de medición (100) está dispuesto en la zona del frontal del vehículo.
Patentes similares o relacionadas:
Nivel láser con soporte ajustable, del 22 de Julio de 2020, de KAPRO INDUSTRIES LTD.: Un nivel láser para ser colocado sobre una superficie de referencia horizontal, comprendiendo el nivel láser: (a) un cuerpo de nivel láser para proyectar […]
APARATO ASISTENTE DE LA ESTACIÓN TOTAL PARA LA MEDICIÓN CON OBSTÁCULOS, APLICADO A TOPOGRAFÍA, del 4 de Junio de 2020, de GÓMEZ PALACIO, Sergio: La presente invención se refiere a un dispositivo o aparato asistente de la estación total en topografía, el cual es usado para la medición con obstáculos, […]
Sistema de corrección de alineación y métodos de uso del mismo, del 6 de Mayo de 2020, de GILSON, INC.: Un sistema de corrección de alineación que comprende (a) una base que tiene una superficie base con una o más ubicaciones objetivo, en donde cada ubicación […]
Sistema de medición de desplazamiento de vía férrea y procedimiento para mantenimiento proactivo, del 5 de Febrero de 2020, de Siemens Mobility Pty Ltd: Un sistema de medición para determinar el desplazamiento físico de una vía férrea durante el uso de la vía férrea , […]
Procedimiento y sistema para determinar un objetivo, del 18 de Diciembre de 2019, de Vricon Systems Aktiebolag: Un procedimiento de determinación de la posición de un blanco, comprendiendo el procedimiento las etapas de: - medir con un dispositivo de […]
 Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Cámara, del 27 de Noviembre de 2019, de Nctech Ltd: Cámara panorámica que presenta un campo de visión global de 360° y configurada para capturar una imagen de 360° de una escena que se extiende alrededor […]
Encofrado ascendente y procedimiento para la erección de una estructura de hormigón, del 2 de Octubre de 2019, de DOKA GmbH: Un encofrado ascendente para la erección de una estructura de hormigón vertiendo sucesivamente una pluralidad de segmentos de colada, comprendiendo […]
Dispositivo de nivelación láser basado en acelerómetro, del 4 de Septiembre de 2019, de MEDTRONIC XOMED, INC.: Un sistema de nivelación láser para su uso con un sistema de drenaje de paciente , que comprende: una carcasa ; un soporte de montaje acoplado a la carcasa […]