Procedimiento de georeferenciación en mapa ("map matching") con integridad garantizada.
Un procedimiento de determinación de un vial o un conjunto de viales o zonas transitables recorridos por unusuario con una probabilidad mínima asociada o integridad,
que comprende:
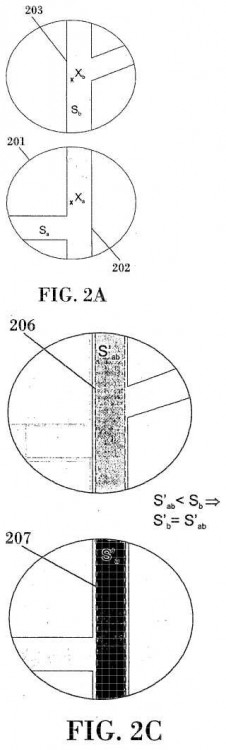
- recibir de un sistema de posicionamiento información relativa a una primera y a una segunda soluciones deposición (PVT) de dicho usuario en un primer instante de tiempo ta y en un segundo instante tb posterior alprimer instante ta, respectivamente, así como sendas elipses de integridad de posición, Ia e Ib (201), consendas probabilidades mínimas asociadas, Pa y Pb, de que el usuario se encuentre en cada una de ellas en tay en tb, respectivamente, y un incremento de posición Δab (209) entre ta y tb con su elipse Iab de integridad deincremento de posición (204) y su probabilidad Pab asociadas;
- obtener de un sistema de información geográfica GIS información sobre sendas zonas transitables TGIScorrespondientes a dichas primera y segunda soluciones PVT;
- determinar una primera área íntegra transitable Sa (202) y una segunda área íntegra transitable Sb (203)como intersección para cada instante de tiempo de dichas elipses de integridad de posición con dichas zonastransitables TGIS;
- propagar dicha primera área íntegra transitable al instante posterior tb mediante el incremento de posiciónΔab (209) entre los primer y segundo instantes de tiempo proporcionados por el sistema de posicionamiento,teniendo en cuenta la incertidumbre asociada a dicho incremento determinada por la elipse de integridad delincremento de posición Iab (204), obteniéndose una área íntegra propagada Sab (208);
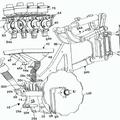
- eliminar de dicha área íntegra propagada Sab las zonas no transitables, obteniéndose una área íntegra transitable propagada S'ab (206);
- determinar una área íntegra transitable final S'b compuesta por un vial o un conjunto de viales transitablesen el segundo instante tb, bien como la menor entre dicha segunda área íntegra transitable Sb (203) y dichaárea íntegra transitable propagada S'ab (206) o bien como la intersección de dicha segunda área íntegratransitable Sb (203) y de dicha área íntegra transitable propagada S'ab (206);
- determinándose la probabilidad mínima P'b de que el usuario se encuentre en dicha área íntegra transitablefinal S'b en el segundo instante tb o nivel de integridad de S'b:
- en caso de que dicha área íntegra transitable final S'b sea dicha segunda área íntegra transitable Sb(203), como la probabilidad Pb asociada a la elipse de integridad Ib de dicha segunda solución PVT, esdecir, P'b ≥ Pb;
- en caso de que dicha área íntegra transitable final S'b sea dicha área íntegra transitable propagadaS'ab (206), como el producto de la probabilidad Pa asociada a la primera área transitable Sa, dada por laelipse de integridad Ia de dicha primera solución PVT, y la probabilidad asociada a la elipse deintegridad Iab correspondiente al incremento relativo de posición Δab entre ta y tb, es decir, P'b ≥ Pa . Pab;- en caso de que dicha área íntegra transitable final S'b se determine como la intersección de la segundaárea íntegra transitable Sb (203) y dicha área íntegra transitable propagada S'ab (206), mediante la expresión:P'b ≥ Pa . Pab + Pb - 1.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08380079.
Solicitante: GMV AEROSPACE AND DEFENCE S.A..
Nacionalidad solicitante: España.
Inventor/es: MARTINEZ OLAGUE,MIGUEL ANGEL, CARO RAMON,JOSE, TOLEDO LOPEZ,MANUEL, AZAOLA SAENZ,MIGUEL, Fernández Hernández,Ignacio.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/30 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › Comparación de planos o mapas topográficos.
PDF original: ES-2387772_T3.pdf
Fragmento de la descripción:
Procedimiento de georeferenciación en mapa (“map matching”) con integridad garantizada.
Campo de la Invención
La presente invención pertenece al campo de aplicaciones de posicionamiento, en particular aquellas que requieran
o se beneficien del uso de información geográfica y necesiten una alta garantía de servicio o integridad, como por ejemplo el posicionamiento mediante un sistema de navegación por satélite para usuarios y vehículos terrestres que circulan por una red de calles y carreteras.
La invención puede utilizarse tanto para aplicaciones críticas de seguridad como para aquellas que conlleven responsabilidades legales o contractuales.
Antecedentes de la Invención
El uso de Sistemas Globales de Navegación por Satélite (GNSS) , como GPS, para el posicionamiento de vehículos, se encuentra muy extendido en la actualidad. Mediante la recepción y procesado de la señal de varios satélites, un usuario es capaz de determinar su posición y una referencia temporal. Esta información se determina conociendo la posición de los satélites y el tiempo que la señal ha tardado en llegar al usuario. Además es necesario estimar los retrasos que afectan al tiempo de llegada de la señal, como son las desviaciones de los satélites, el retardo atmosférico y los efectos locales y del receptor. Actualmente, un usuario puede determinar su posición con una precisión de unos pocos metros aproximadamente en entornos de buena visibilidad, existiendo errores mayores en entornos no controlados.
Además de la solución de posición y tiempo, existen técnicas que aseguran un nivel de confianza, o integridad, de dicha solución . Dichas técnicas proporcionan un lugar geométrico (elipsoide en el espacio, elipse en el plano) en el que se asegura que se encuentra el usuario con una probabilidad asociada (por ejemplo, 99, 99999% en el entorno aeronáutico) . Dichas técnicas son ya conocidas y se aplican en sistemas SBAS, como WAAS o EGNOS, o se calculan mediante algoritmos autónomos de RAIM (Receiver Autonomous Integrity Monitoring) o derivados, tanto para aplicaciones críticas de seguridad como para aquellas que tengan implicaciones legales o contractuales. Existen técnicas que proporcionan integridad en entornos de baja visibilidad o no controlados, como cañones urbanos, como se describe en EP1729145, “Method and System for providing GNSS navigation position solution with guaranteed integrity in non-controlled environments”.
Por otra parte, es muy común el uso combinado de posicionamiento GNSS y Sistemas de Información Geográfica (GIS) , es decir, mapas cartográficos digitales que modelan el entorno, de forma que la información de posición del usuario pueda ser relacionada con el mundo real, con el fin de proporcionar guiado en ruta o cualquier otro tipo de información.
En aplicaciones para el transporte terrestre, la combinación de navegación por satélite y GIS se suele realizar mediante técnicas de georeferenciación en mapa o Map Matching (término inglés que se usará de ahora en adelante en el presente texto, o su abreviatura ‘MM’) . Dichas técnicas identifican cuál es el segmento o vial (calle, carretera, autopista) por el que más probablemente circula el usuario, así como su posición a lo largo del mismo. En caso de no existir errores ni en la posición GNSS ni en la información GIS, el proceso sería inmediato, ya que la posición coincidiría con un punto en el vial determinado por el que el usuario se encontrase circulando. Sin embargo, la realidad es bien distinta, ya que existen fenómenos causantes de error en la posición GNSS –errores relativos a los satélites, retardos atmosféricos, reflejos de la señal o multicamino, particularmente importante en entornos urbanos–, que pueden causar errores de hasta centenares de metros, así como errores en el proceso de creación de los mapas digitales, debidos principalmente al factor de escala, la transformación de coordenadas, la traslación de una superficie curva a un plano (generalización) , la referencia de posición (datum) y el proceso de digitalización.
Los procedimientos de MM existentes en el estado de la técnica abarcan desde los algoritmos más sencillos, en los que se aproxima la posición al segmento o vial más cercano en ese instante, hasta otros mucho más complicados. Una de las principales referencias en algoritmos de MM es “An Introduction to Map Matching for Personal Navigation Assistants”, Bernstein D. Kornhauser A., 1996, donde se presentan las primeras aproximaciones al uso de MM con un sistema de posicionamiento. Los procedimientos propuestos se dividen en geométricos y topológicos. Los primeros solo tienen en cuenta la geometría de los segmentos que definen el mapa GIS, mientras los segundos además tienen en cuenta la forma en que dichos segmentos están conectados. Posteriormente se han desarrollado procedimientos más avanzados, en los que se compara la trayectoria en el tiempo con las posibles trayectorias en el mapa mediante reconocimiento de patrones, filtros de Kalman, o lógica difusa para seleccionar el vial apropiado. Sin embargo, la precisión de estos procedimientos no está garantizada, ni se proporciona al usuario un valor de confianza, o integridad, de la solución adoptada, sino que están enfocados al ajuste de la posición a un segmento de la mejor manera posible en la mayor parte de los casos.
El procedimiento probabilístico de MM, descrito en “Vehicle Location and Navigation System”, Zhao Y., 1997 y en “High Integrity Map Matching Algorithms for Advanced Transport Telematics Applications” Quddus M., 2006, podría
considerarse un antecedente a la presente invención, ya que genera una elipse a partir de la matriz de covarianza de la posición, y analiza como posibles segmentos solamente aquellos que se encuentran dentro de dicha elipse, descartando aquellos cuya orientación no coincide con la de la marcha del vehículo. El uso de esta elipse basada en la covarianza de la posición es similar al concepto de integridad descrito anteriormente. Sin embargo, el procedimiento probabilístico tiene algunas pegas:
- por ejemplo, que no se basa en la integridad de la posición que proporciona el sistema de navegación, sino que usa la matriz de covarianza solamente para seleccionar los posibles viales dentro de una zona de mayor probabilidad, que no es suficiente para garantizar la integridad de la posición;
- o por ejemplo, que propone usar el sentido de la marcha para descartar segmentos, exponiéndose a descartar el vial correcto en caso de giro, cambio de carril, o error en el cálculo del sentido de la marcha, por lo que, al usar procedimientos no íntegros para seleccionar el vial, la integridad inicial, si la hubiera, perdería su validez.
En los últimos años se han desarrollado procedimientos que han intentado proporcionar un valor de integridad a la solución de MM, y que se describen a continuación. No obstante el concepto de integridad usado no se corresponde al que rigurosamente se usa en esta patente, que está basado en los conceptos introducidos por la aviación civil. De hecho, en ningún caso se garantiza la probabilidad de que el segmento identificado sea el correcto, lo cual es esencial para el concepto de integridad.
En “Integrity of map-matching algorithms”, Quddus M., Ochieng W., Noland B., 2006 y en “High Integrity Map Matching Algorithms for Advanced Transport Telematics Applications” Quddus M., 2006 se propone un algoritmo de MM íntegro basado en un indicador global de integridad (0-100) para soluciones dadas por procedimientos ya existentes (topológico, probabilístico y de lógica difusa) . Dicho indicador se determina mediante la combinación de los siguientes tres criterios:
- Integridad basada en la incertidumbre asociada a la solución de posición: se determina una desviación típica (O) basada en las incertidumbres del mapa (Omap) y de la posición GPS (On y Oe) y se la multiplica por un coeficiente K, calculado mediante resultados empíricos y en función del número de carriles del vial. Este indicador da una medida de la incertidumbre de la posición GPS y del mapa, pero en ningún caso una garantía de integridad en sí mismo.
-
Reivindicaciones:
1. Un procedimiento de determinación de un vial o un conjunto de viales o zonas transitables recorridos por un usuario con una probabilidad mínima asociada o integridad, que comprende:
- recibir de un sistema de posicionamiento información relativa a una primera y a una segunda soluciones de posición (PVT) de dicho usuario en un primer instante de tiempo ta y en un segundo instante tb posterior al primer instante ta, respectivamente, así como sendas elipses de integridad de posición, Ia e Ib (201) , con sendas probabilidades mínimas asociadas, Pa y Pb, de que el usuario se encuentre en cada una de ellas en ta y en tb, respectivamente, y un incremento de posición fab (209) entre ta y tb con su elipse Iab de integridad de incremento de posición (204) y su probabilidad Pab asociadas;
- obtener de un sistema de información geográfica GIS información sobre sendas zonas transitables TGIS correspondientes a dichas primera y segunda soluciones PVT;
- determinar una primera área íntegra transitable Sa (202) y una segunda área íntegra transitable Sb (203) como intersección para cada instante de tiempo de dichas elipses de integridad de posición con dichas zonas transitables TGIS;
- propagar dicha primera área íntegra transitable al instante posterior tb mediante el incremento de posición fab (209) entre los primer y segundo instantes de tiempo proporcionados por el sistema de posicionamiento, teniendo en cuenta la incertidumbre asociada a dicho incremento determinada por la elipse de integridad del incremento de posición Iab (204) , obteniéndose una área íntegra propagada Sab (208) ;
- eliminar de dicha área íntegra propagada Sab las zonas no transitables, obteniéndose una área íntegra transitable propagada S’ab (206) ;
- determinar una área íntegra transitable final S’b compuesta por un vial o un conjunto de viales transitables en el segundo instante tb, bien como la menor entre dicha segunda área íntegra transitable Sb (203) y dicha área íntegra transitable propagada S’ab (206) o bien como la intersección de dicha segunda área íntegra transitable Sb (203) y de dicha área íntegra transitable propagada S’ab (206) ;
- determinándose la probabilidad mínima P’b de que el usuario se encuentre en dicha área íntegra transitable final S’b en el segundo instante tb o nivel de integridad de S’b:
- en caso de que dicha área íntegra transitable final S’b sea dicha segunda área íntegra transitable Sb (203) , como la probabilidad Pb asociada a la elipse de integridad Ib de dicha segunda solución PVT, es decir, P’b = Pb;
- en caso de que dicha área íntegra transitable final S’b sea dicha área íntegra transitable propagada S’ab (206) , como el producto de la probabilidad Pa asociada a la primera área transitable Sa, dada por la elipse de integridad Ia de dicha primera solución PVT, y la probabilidad asociada a la elipse de integridad Iab correspondiente al incremento relativo de posición fab entre ta y tb, es decir, P’b = Pa . Pab;
- en caso de que dicha área íntegra transitable final S’b se determine como la intersección de la segunda área íntegra transitable Sb (203) y dicha área íntegra transitable propagada S’ab (206) , mediante la expresión: P’b ; Pa . Pab + Pb – 1.
2. Un procedimiento según la reivindicación 1, que además comprende repetir el procedimiento definido en la reivindicación 1 para cada solución PVT proporcionada en cada instante ti, propagando el área íntegra transitable desde un instante anterior tj, determinando viales o zonas transitables y su probabilidad asociada en varios instantes consecutivos a lo largo de una trayectoria.
3. Un procedimiento según las reivindicaciones 1 y 2, que además realiza un procesado adicional o post-procesado, con una periodicidad configurable y a lo largo de un arco de instantes configurable m, que comprende, para cada instante ti de dicho arco:
- realizar la propagación del área transitable del instante ti, al instante inmediatamente anterior ti-1, mediante el incremento de posición entre ambos instantes, tomado en sentido contrario, y su elipse de integridad asociada, e intersecar con la zona transitable anteriormente calculada en ti-1, tal y como se define en la reivindicación 1;
- realizar los pasos anteriores sobre todos los instantes del arco, de ti-1 a ti-2, de ti-2 a ti-3, ..., hasta ti-m, tal y como se define en la reivindicación 2, para así incluir a posteriori la información de zonas transitables en ti en los instantes anteriores.
4. Un procedimiento según cualquiera de las reivindicaciones 1-3, en el que el sistema de posicionamiento es un
sistema GNSS, en el que el incremento de posición entre dos instantes de tiempo y su integridad son determinados mediante el incremento de la medida de fase de portadora de los satélites entre ambos instantes.
5. Un procedimiento según la reivindicación 4, en el que el sistema de posicionamiento usado es un sistema GNSS hibridado con un sistema inercial Dead Reckoning.
6. Un procedimiento según cualquiera de las reivindicaciones 1-3, en el que el sistema de posicionamiento es un sistema basado en comunicaciones inalámbricas y/o balizas, y configurado para proporcionar dicha información relativa a soluciones de posición (PVT) , a incrementos de posición entre dos instantes de tiempo e información relativa a integridad asociada a tales soluciones PVT e incrementos de posición.
7. Un procedimiento según cualquiera de las reivindicaciones 1-6, que además comprende realizar un chequeo de conectividad al propagar entre instantes y obtener el área transitable propagada, descartando aquella zona transitable (501) dentro de dicha área transitable propagada a la que no se puede haber accedido teniendo en cuenta restricciones temporales y de conectividad entre zonas.
8. Un procedimiento según cualquiera de las reivindicaciones anteriores 1-7, en el que, si la probabilidad de que el usuario se encuentre en la zona transitable se ha degradado al cabo del tiempo y está por debajo de un umbral preestablecido, se reinicia el procedimiento y determina la zona transitable y su probabilidad asociada considerando solamente información relativa al instante en curso.
9. Un procedimiento según cualquiera de las reivindicaciones 4, 5 o 7, que además comprende proporcionar una trayectoria continua recorrida por el usuario, basándose en medidas Doppler de los satélites GNSS, que determinan la velocidad instantánea del usuario y las restricciones de la dinámica del mismo.
10. Un procedimiento según cualquiera de las reivindicaciones 1-9, que proporciona una solución en entornos de tres dimensiones, usando mapas 3D y las zonas en el espacio definidas por el elipsoide de integridad y su probabilidad asociada.
11. Un procedimiento según cualquiera de las reivindicaciones 1-8, en el que se propagan las zonas transitables posibles mediante división de la zona transitable proporcionada por el sistema de información geográfica GIS en celdas transitables y no transitables.
12. Un procedimiento según cualquiera de las reivindicaciones 1-8, en el que se propagan las zonas transitables posibles mediante división de la zona transitable proporcionada por el sistema de información geográfica GIS en polígonos que delimitan las áreas transitables.
13. Un procedimiento según cualquiera de las reivindicaciones 1-8, en el que se propagan las zonas transitables posibles mediante traslación de segmentos, a los que se asigna una anchura determinada, y cuya distancia a otros segmentos se evalúa para determinar intersecciones y áreas transitables.
Patentes similares o relacionadas:
 Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Procedimiento para mejorar la precisión de un sistema de navegación en base a radio, del 25 de Marzo de 2020, de SAAB AB: Un procedimiento para mejorar la precisión de un sistema de navegación en base a radio para corregir una posición dada por dicho sistema […]
Detección de zona en un sistema de GNSS, del 7 de Diciembre de 2018, de Q-Free ASA: Método para detección basada en zona de vehículos que pasan dentro y fuera de una zona geográfica usando polígonos para definir el borde de dicha zona, en el […]
Método de actualización de datos de mapa, del 4 de Octubre de 2017, de ROBERT BOSCH GMBH: Un método de actualización de datos de mapa que comprende: recuperar (S400) a partir de un centro de información unos datos de mapa de actualización de todas las […]
 Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro a través de una abridora con orificios, del 23 de Marzo de 2016, de Clean Seed Agricultural Technologies Ltd: Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro desde un aplicador al terreno a través de una abridora con múltiples […]
Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro a través de una abridora con orificios, del 23 de Marzo de 2016, de Clean Seed Agricultural Technologies Ltd: Sistema de mezclado de razón variable de múltiples productos agrícolas para el suministro desde un aplicador al terreno a través de una abridora con múltiples […]
Procedimiento para determinar la longitud de un trayecto recorrido por un vehículo, del 1 de Octubre de 2014, de KAPSCH TRAFFICCOM AG: Procedimiento para determinar la longitud de un trayecto recorrido por un vehículo en una red de carreteras , que está modelizada en forma de un […]
 Dispositivo y procedimiento de asignación de un valor de medida real de una posición geográfica a un objeto de mapa, del 28 de Agosto de 2013, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para corregir datos de referencia memorizados en una base de datos de referencia que presentancoordenadas medidas de una posición de […]
Dispositivo y procedimiento de asignación de un valor de medida real de una posición geográfica a un objeto de mapa, del 28 de Agosto de 2013, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Dispositivo para corregir datos de referencia memorizados en una base de datos de referencia que presentancoordenadas medidas de una posición de […]
 Procedimiento para detectar un paso de frontera, del 15 de Julio de 2013, de KAPSCH TRAFFICCOM AG: Procedimiento para detectar un paso de frontera de un objeto , cuyo movimiento se representamediante una secuencia de posiciones (Pi) en un mapa de carreteras […]
Procedimiento para detectar un paso de frontera, del 15 de Julio de 2013, de KAPSCH TRAFFICCOM AG: Procedimiento para detectar un paso de frontera de un objeto , cuyo movimiento se representamediante una secuencia de posiciones (Pi) en un mapa de carreteras […]
Método de transmitir información de posición de mapa digital y aparato utilizado para el método, del 4 de Julio de 2013, de PANASONIC CORPORATION: Un sistema incluyendo un aparato transmisor y un aparato receptor, almacenando el aparato transmisor un primermapa digital incluyendo una primera sección de carretera […]