Método para computar una cota de error de una solución de posición de GNSS basada en filtro de Kalman.
(18/12/2019) Método para computar una cota B hasta un nivel de confianza dado 1 - α, de un error en una estimación de vector de estado, KSV, de un vector de estado, TSV, de un sistema físico tal como es proporcionado por un filtro de Kalman, recibiendo el filtro de Kalman, del sistema físico, múltiples mediciones sin procesar RMm de diferentes tipos, denotando m cada tipo de medición, proporcionando también el filtro de Kalman:
- el número nOBS,m de mediciones sin procesar de tipo m;
- una matriz de diseño Hm para mediciones de tipo m;
- una matriz de pesos Wm usada para mediciones de tipo m;
- el vector de residuos ym de las mediciones de tipo m, computado después de la actualización de mediciones de Kalman;
- una matriz de covarianza P del error realizado…
Método y sistema para proporcionar una solución de posición de navegación de GNSS con una integridad garantizada en entornos no controlados.
(07/08/2013) Un método para proporcionar una solución de posición de navegación de Sistema Global de Navegación porSatélite (GNSS) con integridad garantizada en entornos no controlados, siendo un entorno no controlado un entornoen el que no son aplicables las suposiciones ni de un modelo de ruido de mediciones a priorini de una únicamedición defectuosa como el peor caso, basándose dicha integridad garantizada en niveles de protección; el métodocomprende:
- procesar una señal de Sistema Global de Navegación por Satélite (GNSS) para obtener mediciones de fasede portadora y mediciones de pseudodistancias,
- llevar a cabo un preprocesamiento de dichas mediciones con el fin de detectar y de caracterizar erroreslocales en dichas mediciones, errores locales que no pueden suponerse a priori, incluyendo dichacaracterización proporcionar cotas de error estimadas…
Procedimiento de georeferenciación en mapa ("map matching") con integridad garantizada.
(02/05/2012) Un procedimiento de determinación de un vial o un conjunto de viales o zonas transitables recorridos por unusuario con una probabilidad mínima asociada o integridad, que comprende:
- recibir de un sistema de posicionamiento información relativa a una primera y a una segunda soluciones deposición (PVT) de dicho usuario en un primer instante de tiempo ta y en un segundo instante tb posterior alprimer instante ta, respectivamente, así como sendas elipses de integridad de posición, Ia e Ib , consendas probabilidades mínimas asociadas, Pa y Pb, de que el usuario se encuentre en cada una de ellas en tay en tb, respectivamente, y un incremento de posición Δab entre ta y tb con su elipse Iab de integridad deincremento de posición y su probabilidad Pab asociadas;
- obtener de un sistema de información…
PROCEDIMIENTO DE DETERMINACION AUTONOMA DE NIVELES DE PROTECCION PARA POSICIONAMIENTO GNSS BASADO EN RESIDUOS DE NAVEGACION Y EN UNA RELACION DE CONFIANZA ISOTROPICA.
(14/12/2010) Procedimiento de cálculo de un nivel de protección horizontal HPL y/o un nivel de protección vertical VPL, que acotan hasta un nivel de confianza dado 1 - α las componentes horizontales y verticales, respectivamente, del error de estimación de la posición δ de una solución de navegación GNSS basada en mínimos cuadrados con un número m de parámetros estimados, solución de navegación que se basa en n observaciones y en una matriz de observación H de n ×m , y cuya solución navegación también proporciona un vector de residuos r ; en el que el nivel de protección horizontal HPL y el nivel de protección vertical VPL se calculan según las siguientes expresiones: **Fórmula** en las que: r es la norma euclídea del vector de residuos de la estimación por mínimos cuadrados r ; **Fórmula** - EE, NN, EN, NE, EU, UE, UU, VU, UV son las componentes espaciales…
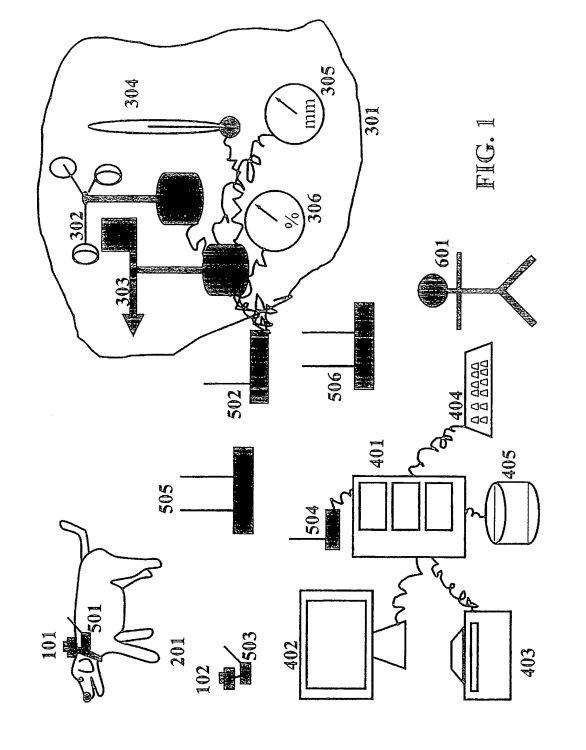
SISTEMA Y PROCEDIMIENTO PARA DETERMINAR LA REGION EXPLORADA POR OLFATEADOR MOVIL (ORGANO O APARATO) EN PRESENCIA DE VIENTO.
Sección de la CIP Física
(16/03/2009). Ver ilustración. Inventor/es: CARO RAMON,JOSE, TOLEDO LOPEZ,MANUEL. Clasificación: G01V9/00.
Sistema para determinar una región explorada minuciosamente por un detector olfateador móvil en presencia de viento, teniendo dicho detector olfateador móvil capacidades de olor precalibradas, el sistema comprende: - medios de posicionamiento fijados al detector olfateador móvil para determinar una trayectoria seguida por el detector olfateador móvil; - medios de obtención de modelos de olor para obtener un modelo de olor orientado ; y - medios de combinación dispuestos para combinar dicha trayectoria y dicho modelo de olor orientado para obtener la región minuciosamente explorada por dicho detector olfateador móvil.
SISTEMA AUTOMATICO DE COBRO POR USO DE INFRAESTRUCTURAS DE CIRCULACION BASADO SOLO EN NAVEGACION POR SATELITE DE PRESTACIONES GARANTIZADAS Y METODO PARA SU ANALISIS Y DISEÑO.
(01/07/2008) Un sistema automático de cobro a un vehículo (i) por uso durante un periodo de cobro Tc de una infraestructura delimitada por una frontera basado en localización GNSS de prestaciones garantizadas, que comprende: - un receptor embarcado u OBU con integridad que además de proporcionar información de posición proporciona información adicional relativa al error que cabe esperar en dicha posición consistente en: - una bandera de salud ("Healthy"/"Unhealthy"), cuando la bandera es "Healthy" el error en la solución de posición en una dirección y sentido cualquiera está acotado superiormente por la cantidad RPL con una probabilidad igual a un…
{kind=link}