PROCEDIMIENTO PARA DESACOPLAR UN OBJETO VOLADOR NO TRIPULADO DE UNA AERONAVE PORTADORA.
Procedimiento para desacoplar un objeto (2) volador no tripulado de una aeronave (1) portadora en el que el objeto (2) volador posee un dispositivo (32) autónomo de regulación del vuelo,
que actúa sobre los dispositivos (23, 24) de mando del objeto (2) volador, con los siguientes pasos:
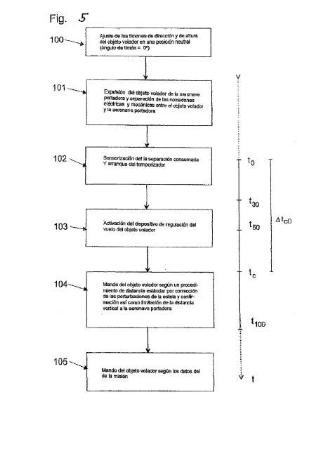
a) ajuste de los timones de dirección y de altura del objeto volador en una posición neutral, en la que el correspondiente ángulo de timón es 0º;
b) separación de las conexiones eléctricas y mecánicas entre el objeto (2) volador y la aeronave (1) portadora;
c) sensorización de la separación realizada por medio de sensores del objeto (2) volador;
d) activación del dispositivo (32) de regulación del vuelo y control automático del objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de la corrección de las variaciones del estado de vuelo causadas por el campo de la estela reinante entre el objeto (2) volador y la aeronave (1) portadora;
e) mando automático del Objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de los datos almacenados en al menos una memoria (34) del objeto (2) volador.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200930479.
Solicitante: LFK LENKFLUGKORPERSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: HAGENAUER FORST 27 SCHROBENHAUSEN-86529 ALEMANIA ALEMANIA.
Inventor/es: GRABMEIER,MICHAEL, STUMPP,CHRISTINE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D1/12 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › B64D 1/00 Lanzamiento, eyección, soltado o recepción de objetos, líquidos o similares, durante el vuelo (en lo que respecta a miras para armamento, F41G tiene prioridad; paracaídas B64D 17/00; asientos eyectables B64D 25/10; cápsulas eyectables B64D 25/12; repostado de combustible en vuelo B64D 39/00; aparatos de lanzamiento para proyectiles o para misiles F41F 1/00, F41F 7/00; lanzadores de cohetes o torpedos F41F 3/00). › Soltado.
- B64D5/00 B64D […] › Aeronaves transportadas por aeronaves, p. ej. para ser lanzadas o recogidas en vuelo (conjuntos volantes formados por aeronaves independientes B64C 37/02).
- F41F3/04 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41F APARATOS PARA LANZAR PROYECTILES DESDE UN TUBO, p. ej. CAÑONES (armas de fuego individuales F41C ); APARATOS PARA LANZAR COHETES O TORPEDOS; CAÑONES LANZA-ARPONES (características o detalles de funcionamiento comunes a la vez a las armas de fuego individuales y a las piezas de artillería, soportes para dichas armas F41A; lanzamiento de proyectiles sin utilización de una carga propulsiva explosiva o combustible F41B). › F41F 3/00 Aparatos de lanzamiento para cohetes o torpedos. › para cohetes.
Fragmento de la descripción:
Procedimiento para desacoplar un objeto volador no tripulado de una aeronave portadora.
Ámbito técnico
El presente invento se refiere a un procedimiento para desacoplar un objeto volador no tripulado de una aeronave portadora. El invento se refiere en especial a un procedimiento para el desacoplamiento de un objeto volador no tripulado, aerodinámicamente inestable de una aeronave portadora.
Si bien los objetos voladores no tripulados convencionales, por ejemplo los conocidos "Cruise Misiles" están provistos de alas propias como ayuda ascensional, estas alas se hallan durante el vuelo de transporte, es decir cuando el objeto volador está acoplado con la aeronave portadora, en una posición alojada en el contorno del objeto volador y sólo son extendidas después del desacoplamiento del objeto volador. Por lo tanto, el objeto volador se halla inmediatamente después del desacoplamiento del avión portador en un estado aerodinámicamente inestable. La estabilidad aerodinámica (en especial en el eje de cabeceo) sólo mejora después de la extensión de las alas.
Durante el desacoplamiento de un objeto volador no tripulado fijado a la vehículo aéreo en un pilón de la aeronave portadora es preciso garantizar, que el objeto volador no tripulado no sea desviado inmediatamente después del desacoplamiento por las fuerzas aerodinámicas, que actúan sobre el, por ejemplo el campo de la estela desplazado (es decir el campo de las corrientes alrededor del objeto volador en el estado acoplado) y las fuerzas de expulsión de un sistema eyector previsto en el pilón (generalmente un sistema de gas a presión) de tal modo, que colisione con la aeronave portadora o entre en un estado de vuelo, que ya no pueda ser regulado.
Las fuerzas aerodinámicas, que actúan sobre el objeto volador, dependen de la velocidad de ataque, es decir de la velocidad relativa de la aeronave portadora y el aire durante el desacoplamiento (suelta) del objeto volador no tripulado, de la densidad del aire, es decir de la altura de vuelo en la que tiene lugar la suelta, del ángulo de ataque del objeto volador y de las condiciones aerodinámicas de las corrientes, es decir el campo de la estela del objeto volador no tripulado acoplado con la aeronave portadora. Este campo de la estela, que es distinto de la corriente de aire en el campo aéreo libre, resulta de las zonas de estrechamiento de la corriente (por ejemplo por recipientes en las estaciones de armamento adyacentes o el estrechamiento del espacio entre el objeto volador y el lado inferior de la aeronave portadora por medio del desplazamiento del ángulo de cabeceo previsto durante la instalación del objeto volador) y/o de zonas de retención de la corriente (por ejemplo en la raíz delantera del pilón) con lo que se producen en el objeto volador diferencias de presión estáticas y dinámicas y con ello la acción especial de fuerzas y de pares, que desaparecen nuevamente durante el desacoplamiento al aumentar la distancia a la aeronave portadora, lo que de manera típica tiene lugar aproximadamente 200 ms después del desacoplamiento. Después actúa sobre el objeto volador la aerodinámica de una corriente de aire libre.
Las diferencias de presión entre el lado superior y el lado inferior del objeto volador dan lugar a pares de cabeceo y las diferencias de presión entre el lado izquierdo y el derecho del objeto volador dan lugar a pares de guiñada. En las estaciones de armamento de las alas con una separación suficiente de los recipientes adyacentes se producen de manera típica pares despreciables alrededor del eje de guiñada y del eje de rotación. Sin embargo, se produce un par de cabeceo dominante, que presiona hacia abajo la proa del objeto volador y cuya intensidad depende del ángulo de ataque del objeto volador, del número de Mach y de la densidad del aire. Este par de cabeceo ya actúa sobre el objeto volador en el estado acoplado y durante el desacoplamiento ejerce sobre el objeto volador un impulso de giro más o menos grande alrededor del eje de cabeceo. Este efecto de giro específico desaparece durante el proceso de desacoplamiento a medida que aumenta la distancia del objeto volador al aeronave portadora, ya que se igualan las diferencias de presión entre el lado superior y el inferior. Dado que el objeto volador apenas posee en esta situación una estabilidad dinámica de cabeceo, continúa el movimiento de giro alrededor del eje de cabeceo provocado por el par de cabeceo, aumentando considerablemente la tasa de giro de cabeceo debido a la superficie cada vez mayor del objeto volador expuesta a la presión dinámica del aire atacante, lo que sucede especialmente cuando el punto de presión aerodinámico se halla delante del centro de gravedad (la proa está delante). Entonces se produce con gran rapidez una posición de vuelo del objeto volador, que ya no es posible estabilizar, de manera, que el objeto volador no tripulado desacoplado cae sin control y se pierde para la misión prevista, si no se aplican a tiempo las contramedidas correspondientes.
El objeto volador no tripulado sufre inmediatamente después de la suelta y debido a las fuerzas aerodinámicas, que actúan sobre él, un par de cabeceo, que presiona hacia abajo la proa del objeto volador, con lo que el objeto volador puede entrar en una posición de vuelo vertical no controlable. Esta posición de vuelo tampoco puede ser estabilizada después de la extensión de las alas, de manera, que el objeto volador no tripulado desacoplado cae de manera incontrolada y se pierde para la misión prevista.
Estado de la técnica
El desacoplamiento de un objeto volador de la aeronave portadora tiene lugar en un estado del objeto volador en el que todavía no está activada su propia regulación de la posición de vuelo. Por ello se debe evitar, que, debido a un comportamiento erróneo de la regulación de la posición de vuelo del objeto volador no tripulado, se produzca en la proximidad inmediata de la aeronave portadora una colisión entre el objeto volador y la aeronave portadora. Por esta razón se dio preferencia hasta ahora a diferentes procedimientos.
Si el objeto volador es aerodinámicamente estable e inactivo durante el vuelo de transporte, es decir que carece de una alimentación propia con energía, se une con la aeronave portadora, además del soporte mecánico, por medio de un cable, que, después de la suelta del objeto volador activa a una determinada distancia del objeto volador de la aeronave portadora la alimentación con corriente del objeto volador, de manera, que sólo después puede entrar en funcionamiento la regulación de la posición de vuelo del objeto volador. Para este procedimiento sólo se pueden utilizar objetos voladores con una estabilidad aerodinámica suficientemente grande o con condiciones de desacoplamiento limitadas desde el punto de vista del ángulo de ataque, de número de Mach y de la altura para excluir la pérdida del objeto volador debido al campo de la estela actuante hasta que se activa la regulación de vuelo propia.
En un procedimiento alternativo, el sistema de energía del objeto volador aerodinámicamente estable ya está activado durante el vuelo de transporte. Sin embargo, por razones de seguridad se retarda con un dispositivo temporizador en el objeto volador la activación de la regulación de vuelo propia y el movimiento de los timones de las superficies de mando es limitado durante un tiempo determinado hasta que el objeto volador esté suficientemente alejado de la aeronave portadora. En este caso tampoco existe, debido a la estabilidad aerodinámica del objeto volador, durante la fase del vuelo no controlado entre la suelta y la activación de la regulación de la posición de vuelo propia del objeto volador el peligro de la pérdida debida las fuerzas aerodinámicas, que actúan sobre él.
Sin embargo, si el objeto volador es inestable, al menos en la primera fase de vuelo después de la suelta, y si actúan sobre él fuerzas relevantes y pares del campo de la estela, existe el peligro de que en el espacio de tiempo entre la suelta y la activación de la regulación de la posición de vuelo propia entre en una posición de vuelo inestable y se pierda por ello. La actual filosofía de seguridad exige, sin embargo, que la regulación de la posición de vuelo del objeto volador sólo puede entrar en acción, cuando quede asegurado, que una regulación de la posición de vuelo defectuosa no de lugar a una colisión del objeto volador con el portador. Este intervalo de tiempo no se halla hasta ahora en la práctica de los objetos voladores aerodinámicamente inestables por debajo de 100 ms después del desacoplamiento sensorizado...
Reivindicaciones:
1. Procedimiento para desacoplar un objeto (2) volador no tripulado de una aeronave (1) portadora en el que el objeto (2) volador posee un dispositivo (32) autónomo de regulación del vuelo, que actúa sobre los dispositivos (23, 24) de mando del objeto (2) volador, con los siguientes pasos:
a) ajuste de los timones de dirección y de altura del objeto volador en una posición neutral, en la que el correspondiente ángulo de timón es 0º;
b) separación de las conexiones eléctricas y mecánicas entre el objeto (2) volador y la aeronave (1) portadora;
c) sensorización de la separación realizada por medio de sensores del objeto (2) volador;
d) activación del dispositivo (32) de regulación del vuelo y control automático del objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de la corrección de las variaciones del estado de vuelo causadas por el campo del aire de la estela reinante entre el objeto (2) volador y la aeronave (1) portadora;
e) mando automático del objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de los datos almacenados en al menos una memoria (34) del objeto (2) volador.
2. Procedimiento según la reivindicación 1, caracterizado porque la regulación autónoma del vuelo del objeto volador en el paso d) arranca en un instante (tc) no más tarde que 100 ms después del arranque de un temporizador en el instante (t0) de la sensorización de la separación.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado porque los dispositivos (23, 24) de mando del objeto (2) volador no son accionados en el paso d) antes de la sensorización de la separación realizada para el mando del objeto (2) volador.
4. Procedimiento según la reivindicación 1, 2 ó 3, caracterizado porque la activación del dispositivo (32) de regulación del vuelo en el paso d) tiene lugar de tal modo, que el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto (2) volador se halle en un intervalo de tiempo no menor que 30 ms después del arranque del temporizador.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque la activación del dispositivo (32) de regulación del vuelo en el paso d) tiene lugar de tal modo, que el que el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto (2) volador se halle en un intervalo de tiempo entre 50 ms y 100 ms después del arranque del temporizador.
6. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto volador depende de la velocidad (VR) de vuelo de la aeronave (1) portadora durante la separación del objeto volador de la aeronave portadora en el paso b).
7. Procedimiento según la reivindicación 6, caracterizado porque la diferencia (Δtc0) temporal entre el instante (t0) de la sensorización de la separación y el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto volador decrece al aumentar la velocidad (VR) de vuelo.
8. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto (2) volador depende de la altura (HR) de vuelo de la aeronave (1) portadora durante la separación del objeto volador de la aeronave portadora en el peso b).
9. Procedimiento según la reivindicación 8, caracterizado porque la diferencia (Δtc0) temporal entre el instante (t0) de la sensorización de fa separación y el instante (tc) en el que arranca la regulación autónoma del vuelo del objeto volador es tanto menor, cuanto menor es la altura (HR) de vuelo.
10. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el paso e) de se realiza como sigue:
e1) control automático del objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de los datos de un procedimiento de distancia estándar almacenados en la memoria (34) del objeto volador y
e2) control automático del objeto (2) volador por medio del dispositivo (32) de regulación del vuelo y de los dispositivos (23, 24) de mando del objeto (2) volador sobre la base de los datos de la misión almacenados en la memoria del objeto volador.
11. Procedimiento según la reivindicación 10, caracterizado porque el paso e2) sólo se produce una vez finalizado el procedimiento de distancia del paso e1).
Patentes similares o relacionadas:
Combinación de vehículos aéreos no tripulados y método y sistema para participar en múltiples aplicaciones, del 11 de Diciembre de 2019, de EQQUERA Inc: Sistema que comprende un vehículo aéreo no tripulado de plataforma que transporta múltiples vehículos aéreos no tripulados secundarios, comprendiendo dicho sistema: […]
Nave no tripulada y equipo de intervención aerotransportado asociado, del 7 de Noviembre de 2018, de DAE: Nave no tripulada que comprende un fuselaje equipado de medios de elevación aptos para permitir una posición de vuelo boca abajo […]
Dispositivo auxiliar para un avión que vuela a gran altitud, del 28 de Marzo de 2018, de Airbus Defence and Space GmbH: Dispositivo auxiliar para un avión que vuela a gran altitud, comprendiendo el dispositivo auxiliar un accionamiento independiente del avión y pudiéndose […]
DISPOSITIVO NEUTRALIZADOR DE RPA (AERONAVE PILOTADA REMOTAMENTE), del 25 de Enero de 2018, de ÁLVAREZ VILLANUEVA, Pablo José: La invención del Dispositivo Neutralizador de RPA (Aeronave Pilotada Remotamente) tiene como objetivo proporcionar la neutralización de aeronaves RPA (amenaza) […]
Helicóptero lanza-aviones, mejorado, del 25 de Septiembre de 2017, de PORRAS VILA,FCO. JAVIER: El helicóptero lanza-aviones, es un sistema de despegue para los aviones de los portaaviones, que también sirve para los que despegan de un aeropuerto. […]
Biaeronave para todo transporte aéreo, del 23 de Marzo de 2017, de MARTÍNEZ RIVERA, Emilio (100.0%): Biaeronave para todo transporte aéreo, con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo. La invención se refiere a una […]
 Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo, del 2 de Enero de 2015, de MARTÍNEZ RIVERA, Emilio (100.0%): Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo.
La invención […]
Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo, del 2 de Enero de 2015, de MARTÍNEZ RIVERA, Emilio (100.0%): Biaeronave para transporte aéreo en general con capacidad para realizar operaciones de despegue y aterrizaje entre sí en vuelo.
La invención […]
 Biaeronave de pasajeros con capacidad de despegue y aterrizaje entre sí y con sistemas de seguridad y salvamento operativos en vuelo, del 22 de Agosto de 2013, de MARTÍNEZ RIVERA, Emilio (100.0%): La invención se refiere a una aeronave de pasajeros formada por dos aviones independientes que se corresponden y trabajan conjuntamente, […]
Biaeronave de pasajeros con capacidad de despegue y aterrizaje entre sí y con sistemas de seguridad y salvamento operativos en vuelo, del 22 de Agosto de 2013, de MARTÍNEZ RIVERA, Emilio (100.0%): La invención se refiere a una aeronave de pasajeros formada por dos aviones independientes que se corresponden y trabajan conjuntamente, […]