CONTROL DE UN TRANSPORTADOR PERSONAL BASADO EN LA POSICIÓN DEL USUARIO.
Un controlador para un transportador que tiene al menos un elemento primario de contacto con el suelo,
estando controlado el transportador mediante un ángulo de balanceo, caracterizado adicionalmente el controlador por~ a. una entrada para recibir la especificación por parte de un usuario de al menos uno de una guiñada deseada y un régimen de guiñada, estando basados la guiñada deseada y el régimen de guiñada en una orientación detectada del cuerpo del usuario; y b. un procesador para generar una señal de instrucción en base al menos a la guiñada y el régimen de guiñada especificados por el usuario junto con una señal de instrucción de cabeceo en base a un error de cabeceo de tal forma que se mantiene el equilibrio del transportador en el curso de conseguir la dirección y la guiñada especificadas
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2005/032797.
Solicitante: DEKA PRODUCTS LIMITED PARTNERSHIP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 340 COMMERCIAL STREET MANCHESTER, NH 03101-1108 ESTADOS UNIDOS DE AMERICA.
Inventor/es: AMBROGI, ROBERT R., DUGGAN, ROBERT J., FIELD, DOUGLAS J., HEINZMANN, RICHARD KURT, KAMEN, DEAN, MORRELL,John,B, DATTOLO,James,J, MCCAMBRIDGE,Matthew,M, PIEDMONTE,Michael,D, ROSASCO,Richard,J.
Fecha de Publicación: .
Fecha Solicitud PCT: 13 de Septiembre de 2005.
Clasificación Internacional de Patentes:
- A63C17/08 NECESIDADES CORRIENTES DE LA VIDA. › A63 DEPORTES; JUEGOS; DISTRACCIONES. › A63C PATINES; ESQUIES; PATINES DE RUEDAS; DISEÑO O TRAZADO DE CAMPOS DE JUEGO, PISTAS O SIMILARES (esquíes naúticos B63B 32/00, B63B 34/00). › A63C 17/00 Patines de ruedas; Monopatines. › del tipo de rueda única.
- A63C17/12 A63C 17/00 […] › con mecanismo motor.
- B62K3/00B
Clasificación PCT:
- A63C17/12 A63C 17/00 […] › con mecanismo motor.
- B60L11/18
- B60L15/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60L PROPULSION DE VEHICULOS PROPULSADOS ELECTRICAMENTE (disposición o montaje de conjuntos de propulsión eléctrica o de varios motores principales diferentes para una propulsión recíproca o común sobre los vehículos B60K 1/00, B60K 6/20; disposición o montaje de la transmisión eléctrica en los vehículos B60K 17/12, B60K 17/14; prevención del patinado de las ruedas reduciendo la fuerza motriz en vehículos sobre raíles B61C 15/08; máquinas dinamoeléctricas H02K; control o regulación de motores H02P ); SUMINISTRO DE LA ENERGIA ELECTRICA AL EQUIPO AUXILIAR DE VEHICULOS PROPULSADOS ELECTRICAMENTE (circuitos eléctricos para el acoplamiento de vehículos B60D 1/64; calefacción eléctrica para vehículos B60H 1/00 ); SISTEMAS DE FRENOS ELECTRODINAMICOS PARA VEHICULOS, EN GENERAL (control o regulación de motores H02P ); SUSPENSION O LEVITACION MAGNETICAS PARA VEHICULOS; CONTROL DE LOS PARAMETROS DE FUNCIONAMIENTO SOBRE LOS VEHICULOS PROPULSADOS ELECTRICAMENTE; DISPOSITIVOS ELECTRICOS DE SEGURIDAD SOBRE VEHICULOS PROPULSADOS ELECTRICAMENTE. › B60L 15/00 Métodos, circuitos o dispositivos para controlar la velocidad de los motores de tracción de vehículos propulsados eléctricamente, p.ej. la velocidad de los motores de tracción, para realizar rendimientos deseados,; Adaptación sobre el vehículo propulsado eléctricamente de la instalación de control a distancia a partir de un lugar fijo, a partir bien de diferentes puntos del vehículo, bien de diferentes vehículos de un mismo tren. › para el control de vehículo o de su motor, para realizar rendimientos deseados, p. ej. velocidad, par, variación programada de la velocidad.
- B62K17/00 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62K CICLOS; CUADROS PARA CICLOS; DISPOSITIVOS DE DIRECCION; MANDOS ACCIONADOS POR EL CONDUCTOR ADAPTADOS ESPECIALMENTE A LOS CICLOS; SUSPENSION DE CUBOS DE RUEDAS DE CICLOS; SIDECARS, REMOLQUES DELANTEROS O VEHICULOS ADICIONALES SIMILARES PARA CICLOS. › Ciclos no previstos en otro lugar.
- B62K3/00 B62K […] › Bicicletas.
- B62M23/02 B62 […] › B62M PROPULSION POR EL CONDUCTOR DE VEHICULOS DE RUEDAS O DE TRINEOS; PROPULSION POR MOTOR DE TRINEOS O DE CICLOS; TRANSMISIONES ADAPTADAS ESPECIALMENTE A ESTOS VEHICULOS (disposiciones o montaje de transmisiones de vehículos en general B60K; elementos de transmisión en sí F16). › B62M 23/00 Transmisiones caracterizadas por el empleo de otros elementos; Otras transmisiones. › caracterizadas por el empleo de dos o más fuentes distintas de energía, p. ej. transmisiones para motocicletas híbridas (transmisiones para vehículos de ruedas propulsados por el conductor con fuente de energía adicional B62M 6/00).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2373671_T3.pdf
Fragmento de la descripción:
Control de un transportador personal basado en la posición del usuario Campo de la invención La presente invención versa acerca de un control de transportadores personales, y más en particular, acerca de dispositivos y procedimientos para proporcionar una entrada del usuario con respecto ya sea a un control direccional o de velocidad (que tiene cualquier número de elementos de contacto con el suelo) en base a la posición u orientación de un usuario.
Antecedentes Los transportadores estabilizados de forma dinámica hacen referencia a transportadores personales que tienen un sistema de control que mantiene de forma activa la estabilidad del transportador mientras que el transportador está funcionando. El sistema de control mantiene la estabilidad del transportador al detectar de forma continua la orientación del transportador, determinando la acción correctiva para mantener la estabilidad, y ordenar que los motores de las ruedas que efectúen la acción correctiva.
Para vehículos que mantienen un área de presión del neumático estable, el acoplamiento entre el control de la dirección, por una parte, y el control del movimiento hacia delante de los vehículos no es un tema de preocupación dado que, bajo condiciones típicas de la carretera, se mantiene la estabilidad gracias a que las ruedas están en contacto con el suelo durante todo el curso de un giro. El acoplamiento entre los mecanismos de control de la dirección y de equilibrio es un objeto de la patente U.S. nº 6.789.640. Las entradas direccionales que proporcionan, de forma ventajosa, una integración intuitiva y natural de control humano con los requerimientos de la dirección de un vehículo de equilibrio son el objeto de la presente invención.
El documento US 2004/07399 describe un transportador personal con una empuñadura de dirección que anima a un conductor a inclinarse en la dirección de un giro, según el preámbulo de la reivindicación 1.
Resumen de la invención En un aspecto, se proporciona un controlador según la reivindicación 1.
Según las realizaciones preferentes de la presente invención, se proporciona un controlador que puede ser empleado para proporcionar la entrada de un usuario de una dirección deseada de movimiento u orientación para un transportador. El controlador tiene una entrada para recibir la especificación por parte de un usuario de un valor en base a la orientación detectada del cuerpo del usuario.
La entrada especificada por el usuario puede ser comunicada por el usuario utilizando cualquiera de una amplia variedad de modalidades de entrada, incluyendo: detección ultrasónica de la posición del cuerpo, detección de la fuerza ejercida por el pie; inclinación del manillar; manillar activo; detección mecánica de la posición del cuerpo; y entrada direccional de deslizamiento lineal.
En aquellas realizaciones de la invención en las que el transportador tiene capacidad para una operación equilibrada sobre uno o más elementos de contacto con el suelo, se proporciona una entrada para recibir una especificación por parte del usuario de una dirección deseada del movimiento, o un valor deseado de velocidad en base a una orientación detectada del cuerpo del usuario. Un procesador genera una señal de instrucción en base al menos a la dirección especificada por el usuario y el valor de velocidad junto con una señal de instrucción del cabeceo que está basada en un error de cabeceo de tal forma que se mantiene el equilibrio del transportador en el curso de conseguir la dirección y la velocidad especificadas.
En diversas otras realizaciones de la invención, el controlador tiene un sumador para diferenciar un valor de guiñada instantánea del valor especificado por el usuario de la guiñada para generar un valor de error de la guiñada, de forma que la señal de instrucción de la guiñada generada por el procesador está basada al menos en parte en el valor de error de la guiñada. La entrada para recibir la especificación del usuario puede incluir un sensor de presión dispuesto para detectar la orientación del usuario, un sensor ultrasónico dispuesto para detectar la orientación del usuario, o un sensor de fuerza dispuesto sobre una plataforma que soporta al usuario para detectar la distribución de pesos del usuario. En otras realizaciones más, la entrada para recibir la especificación del usuario incluye un eje dispuesto en un plano transversal a un eje que caracteriza la rotación de las dos ruedas dispuestas de forma lateral, la dirección deseada y la velocidad especificada en base a la orientación del eje.
Según realizaciones adicionales de la invención, el transportador de equilibrio puede incluir un manillar, y el controlador puede tener, además, un pivote motorizado para colocar el manillar en base al menos a uno de una aceleración lateral y el ángulo de balanceo del transportador. En particular, el controlador puede tener un bucle de posición para ordenar una posición del manillar sustancialmente proporcional a la diferencia en el cuadrado de la velocidad de una primera rueda y el cuadrado de la velocidad de una segunda rueda.
Según otras realizaciones más de la invención, se proporciona un aparato para advertir a un conductor a colocarse sobre un vehículo de tal forma como para reducir la inestabilidad lateral debida a una aceleración lateral del vehículo. El aparato tiene una entrada para recibir la especificación por parte del conductor de una dirección deseada de desplazamiento y un medio de indicación para indicar al conductor una orientación instantánea deseada del cuerpo en base al menos a la aceleración lateral actual del vehículo. El medio de indicación puede incluir un manillar pivotable con respecto al vehículo, el manillar accionado en respuesta al giro del vehículo.
Breve descripción de los dibujos Las anteriores características de la invención serán comprendidas más fácilmente con referencia a la siguiente descripción detallada, tomada con referencia a los dibujos adjuntos, en los que:
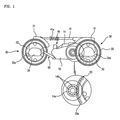
La Fig. 1 muestra un transportador personal, como se describe en detalle en la patente U.S. nº 6.302.230, al que puede aplicarse de forma ventajosa la presente invención;
la Fig. 2 muestra un diagrama de bloques que muestra las entradas y salidas que constituyen una instrucción de guiñada en una arquitectura de un sistema al que puede aplicarse de forma ventajosa la presente invención;
la Fig. 3A es una vista despiezada de componentes de un mecanismo de control de la guiñada que muestra una empuñadura de control de la guiñada acoplada a una interfaz del usuario de un transportador personal, según una realización de la presente invención;
la Fig. 3B muestra una vista despiezada detallada de la empuñadura de control de la guiñada de la Fig. 3A;
la Fig. 3C muestra el sensor integral de control de la guiñada del mecanismo de control de la guiñada de la Fig. 3A;
la Fig. 4 muestra un diagrama esquemático de bloques de un sistema de control de retroalimentación de la guiñada según realizaciones de la presente invención;
la Fig. 5A es una vista esquemática en planta de un conductor en posiciones que indican una colocación completamente cuadrada, una inclinación hacia la izquierda, y un giro en contra del sentido de las agujas del reloj, respectivamente;
la Fig. 5B es una vista frontal de un collar para la cadera para detectar cambios en la orientación del conductor para controlar la guiñada según una realización de la presente invención;
la Fig. 5C es un diagrama de una configuración de transmisor/receptor de ultrasonidos según diversas realizaciones de la presente invención;
la Fig. 5D es un medio de visualización de la sincronización de las formas de onda de señales ultrasónicas transmitidas y recibidas por componentes de realizaciones de la presente invención mostrada en la Fig. 4A;
la Fig. 6A es una vista en planta de la plataforma de un transportador personal con la placa de presión retirada, indicando la colocación de sensores de presión de presión ejercida por los pies según diversas realizaciones de la presente invención;
la Fig. 6B es un esquema de una placa de presión para la aplicación de fuerza por parte de un usuario en realizaciones de la presente invención mostrada en la Fig. 6A;
la Fig. 6C es un esquema que muestra el desarrollo de una señal de instrucción de la guiñada procedente de los sensores de la fuerza... [Seguir leyendo]
Reivindicaciones:
1. Un controlador para un transportador que tiene al menos un elemento primario de contacto con el suelo, estando controlado el transportador mediante un ángulo de balanceo, caracterizado adicionalmente el controlador por a. una entrada para recibir la especificación por parte de un usuario de al menos uno de una guiñada deseada y un régimen de guiñada, estando basados la guiñada deseada y el régimen de guiñada en una orientación detectada del cuerpo del usuario; y b. un procesador para generar una señal de instrucción en base al menos a la guiñada y el régimen de guiñada especificados por el usuario junto con una señal de instrucción de cabeceo en base a un error de cabeceo de tal forma que se mantiene el equilibrio del transportador en el curso de conseguir la dirección y la guiñada especificadas.
2. Un controlador según la reivindicación 1, en el que la entrada de una dirección deseada incluye una dirección hacia delante/atrás especificada por el usuario.
3. Un controlador según la reivindicación 1, que comprende, además:
un sumador para diferenciar un valor de guiñada instantánea del valor de guiñada especificado por el usuario para generar un valor de error de guiñada, de forma que la señal de instrucción de guiñada generada por el procesador está basada al menos en parte en el valor de error de la guiñada, 4. Un controlador según la reivindicación 1, en el que la entrada para recibir una especificación del usuario incluye un sensor de presión dispuesto para detectar la orientación del usuario.
6. Un controlador según la reivindicación 1, en el que la entrada para recibir la especificación del usuario incluye un sensor de fuerza dispuesto en una plataforma que soporta el usuario para detectar la distribución de pesos del usuario. 8. Un controlador según la reivindicación 1, en el que el transportador de equilibrio incluye un manillar, comprendiendo el controlador, además, un pivote motorizado para colocar el manillar en base al menos a uno 30 de la aceleración lateral y el ángulo de balanceo del transportador. 9. Un controlador según la reivindicación 1, que comprende, además, un bucle de posición para ordenar una posición del manillar sustancialmente proporcional a la diferencia en el cuadrado de la velocidad de una primera rueda y en el cuadrado de la velocidad de una segunda rueda. 10. Un aparato para advertir a un conductor a colocarse sobre un vehículo de tal forma como para reducir la 35 inestabilidad lateral debida a la aceleración lateral del vehículo, comprendiendo el aparato: a. una entrada para recibir la especificación por parte del conductor de una dirección deseada de desplazamiento; b. un medio de indicación para indicar al conductor una orientación instantánea deseada del cuerpo en base al menos a la aceleración lateral en curso del vehículo. 11. Un aparato según la reivindicación 10, en el que el medio de indicación comprende un manillar pivotable con respecto al vehículo, pivotando el manillar en respuesta al giro del vehículo. 20 5. Un controlador según la reivindicación 1, en el que la entrada para recibir la especificación del usuario incluye un sensor de ultrasonidos dispuesto para detectar la orientación del usuario.
25 7. Un controlador según la reivindicación 1, en el que la entrada para recibir la especificación del usuario incluye un eje dispuesto en un plano transversal a un eje que caracteriza la rotación de las dos ruedas dispuestas de forma lateral, la dirección deseada y la velocidad especificada en base a la orientación del eje.
Patentes similares o relacionadas:
Patinete eléctrico, del 5 de Junio de 2019, de TIZONA MOTORS S.L: 1. Patinete eléctrico, que siendo del tipo de los que incluyen una estructura sobre la que se establece una plataforma de apoyo para los pies del usuario, […]
Tecnologías para el trasporte, del 27 de Marzo de 2019, de Aders, Aaron Benjamin: Un aparato de trasporte motorizado que comprende: una plataforma ; una pluralidad de bogies acoplados a la plataforma, en donde los bogies estás […]
Vehículo para el desplazamiento de un conductor, comprendiendo una bola que rueda sobre el suelo y en cualquier dirección, del 28 de Enero de 2019, de Innovated Transport Systems UG Haftungsbeschränkt: Vehículo para el movimiento de un impulsor , que comprende un elemento que rueda sobre una superficie de suelo , que comprende un elemento portante soportado de […]
Skate propulsado por motor de combustión interna, del 20 de Enero de 2016, de FERNÁNDEZ GÓMEZ, Ravel: 1. Skate propulsado por motor de combustión interna caracterizada por poseer una superficie de contacto, elemento direccional y rueda motriz trasera. 2. […]
 Carcasa de batería y un monopatín eléctrico que utiliza dicha carcasa, del 30 de Diciembre de 2015, de YUNEEC TECHNOLOGY CO., LIMITED: Una carcasa de batería para un monopatín eléctrico, que comprende una plataforma de soporte , comprendiendo la carcasa de batería […]
Carcasa de batería y un monopatín eléctrico que utiliza dicha carcasa, del 30 de Diciembre de 2015, de YUNEEC TECHNOLOGY CO., LIMITED: Una carcasa de batería para un monopatín eléctrico, que comprende una plataforma de soporte , comprendiendo la carcasa de batería […]
Guia motorizada para patines o similares, del 18 de Marzo de 2015, de BLANCO IVORRA , Victor: 1. Guía motorizada para patines o similares caracterizado porque comprende un cuerpo o guía que sirve de alojamiento a un motor eléctrico asociado […]
Vehículo de transporte personal motorizado, del 15 de Agosto de 2012, de SCARPAR PTY LTD (100.0%): Vehículo personal, que incluye: un chasis que tiene un eje longitudinal y una plataforma de usuario para acomodar un usuario en el vehículo ;una […]
 MOTO TIPO ESQUI, del 16 de Abril de 2009, de ESHIM TECH CO., LTD.: un cuerpo principal que tiene un motor montado en su interior, un eje de rotación que es conectado a un eje de salida (12a) del motor a través de una transmisión […]
MOTO TIPO ESQUI, del 16 de Abril de 2009, de ESHIM TECH CO., LTD.: un cuerpo principal que tiene un motor montado en su interior, un eje de rotación que es conectado a un eje de salida (12a) del motor a través de una transmisión […]