Control de un motor síncrono que tiene rotor con imanes permanentes.
Método de control de un motor síncrono (1) que tiene un estator que comprende un conjunto de electroimanes (7,
9) y que tiene un rotor (5) con imanes permanentes, de manera que el motor síncrono (1) está controlado por
- cálculo en un controlador de flujo (f) de la medida (Vd) de la magnitud de flujo, que es la magnitud del flujo del stator del motor (1),
- cálculo en un controlador (g) del ángulo de carga de la magnitud (Vq) del ángulo de carga, que es el ángulo entre el flujo del estator y el flujo del rotor con referencia al eje de rotación del rotor (5), de manera que la información con respecto a un par motor deseado (Tref) o con respecto a un par motor reducido (Tlim), que es menor que el par motor deseado, es introducida en el controlador (g) de ángulo de carga y, de manera que el controlador (g) de ángulo de carga calcula la magnitud del ángulo de carga dependiendo del par motor introducido,
- combinar la magnitud del flujo (Vd) y la magnitud del ángulo de carga (Vq) para obtener una señal (Vref) que tiene que ser utilizada para obtener instrucciones para controlar corrientes eléctricas de los electroimanes del estator, comprobando de esta manera directamente el flujo del estator,
- calcular repetidamente un valor límite de flujo (ψlim) que depende del valor máximo de un voltaje eléctrico, que se utiliza para impulsar las corrientes a través de los electroimanes (7, 9) del estator, y que depende de la velocidad real del rotor,
- durante la aceleración del rotor (5), mientras el flujo del estator es más reducido que el flujo máximo (ψmax) permitido para el rotor:
* calcular la magnitud del flujo (Vd) dependiendo del resultado de una función predeterminada (f0(T)), de manera que el resultado de la función predeterminada depende del par motor deseado (Tref) y corresponde a la magnitud de flujo del estator, que resulta en el par motor deseado utilizando la corriente de estator mínima posible, y
* calcular la magnitud del ángulo de carga (Vq) dependiendo del par motor deseado. caracterizado porque
- el valor límite de flujo (ψlim) calculado repetidamente depende de un valor máximo predeterminado (ψmax) del flujo del estator permitido para el motor (1),
- el motor síncrono (1) es controlado durante la aceleración adicional del rotor (5) cuando el flujo del estator ha alcanzado el flujo máximo permitido para el motor,
* calculando la magnitud de flujo correspondiente al valor límite de flujo, y
* calculando la magnitud del ángulo de carga dependiendo del par motor deseado,
de manera que el flujo del estator se mantiene constante en el flujo máximo permitido para el motor y, mientras aumenta el par motor deseado, el ángulo de carga aumenta también.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/005894.
Solicitante: BOMBARDIER TRANSPORTATION GMBH.
Nacionalidad solicitante: Alemania.
Dirección: SCHONEBERGER UFER 1 10785 BERLIN ALEMANIA.
Inventor/es: GALIC,Johann.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H02P21/12 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 21/00 Disposiciones o métodos de control de máquinas eléctricas mediante control por vector, p. ej., por control de la orientación del campo. › Control basado en el flujo del estátor implicando la utilización de sensores de posición de rotor o sensores de velocidad del rotor.
PDF original: ES-2380617_T3.pdf
Fragmento de la descripción:
Control de un motor síncrono que tiene rotor con imanes permanentes.
La invención se refiere a un método de control de un motor síncrono que tiene un estator que comprende un conjunto de electroimanes y que tiene rotor con imanes permanentes. Este motor es designado, frecuentemente, motor síncrono de imanes permanentes (PMSM) . La invención se refiere, además, a una disposición para el control de dicho tipo de motor. Un campo de interés específico es el control de un PMSM que es un motor de propulsión para un vehículo ferroviario.
De manera típica, los motores asíncronos que tienen un rotor que tiene, como mínimo, un electroimán, se utilizan para la propulsión de vehículos ferroviarios. El término "vehículos ferroviarios" incluye cualquier vehículo guiado sobre vías. Estos motores asíncronos pueden ser controlados fácilmente, dado que no solamente los electroimanes del estator, sino también el electroimán o electroimanes del rotor pueden ser adaptados al modelo de funcionamiento deseado. No obstante, los motores PMSM tienen algunas ventajas. Especialmente, la densidad de potencia (la potencia por volumen que se puede alcanzar) es elevada y las pérdidas de energía son bajas. Por otra parte, tal como se ha mencionado, el control de un PMSM es más difícil, si se requiere una respuesta rápida del motor en situaciones dinámicas y si es importante la utilización eficaz de los recursos (en particular, el voltaje y energía eléctrica disponibles) .
Usualmente, hay límites para los parámetros funcionales del motor. Algunos de los límites pueden depender de la situación de funcionamiento, otros límites son fijos para el motor. En particular, estos límites son: valor máximo del flujo del estator permitido en el motor, valor del voltaje eléctrico que es utilizado para hacer pasar las corrientes a través de los electroimanes del estator, valor máximo permitido para estas corrientes y par máximo permitido para el motor.
El documento US 2004/0257028 A1 describe el control de motores eléctricos. Un sistema de control comprende un controlador para controlar un motor de imán permanente. La entrada al sistema de control es un control de par generado por un controlador del vehículo. El control es procesado por un bloque de cálculo de amperaje para el par máximo para generar la instrucción de corriente de estator correspondiente y la instrucción del ángulo de la corriente. Un flujo de estator de debilitamiento de campo es generado en un bloque de debilitamiento de campo basado en el enlace del voltaje CC medido y la velocidad angular del rotor. La instrucción de corriente del estator y la instrucción del ángulo de corriente son pasados a un bloque de cálculo del ángulo de par y del flujo del estator que procesa esta información y descompone la misma en una instrucción de flujo del estator y una instrucción de ángulo de par para proporcionar el par máximo para la amplitud de corriente de estator determinada.
El documento US 2006/0055363 A1 describe un sistema de control para una máquina eléctrica que incluye un módulo de debilitamiento de flujo.
Es un objetivo de la presente invención dar a conocer un método y un funcionamiento del tipo que se han mencionado a efectos de controlar un PMSM de manera eficaz. En particular, se tienen que manejar diferentes sistemas operativos, tales como estados operativos en los que se alcanzan límites para los parámetros de funcionamiento del motor.
Es una idea básica de la presente invención utilizar un controlador de flujo directo del estator. Una ventaja de este controlador de flujo es que el voltaje máximo disponible puede ser utilizado para impulsar las corrientes del estator y que el motor muestra un buen comportamiento dinámico. Por ejemplo, un convertidor de CC a CA que es utilizado para impulsar las corrientes de estator del motor, puede ser controlado mediante un funcionamiento del tipo llamado de seis etapas (es decir, en modalidad hexagonal) para conseguir el voltaje disponible máximo. En este caso, cada una de las fases del inversor genera un voltaje que tiene el comportamiento de tiempo de una onda de forma cuadrada en el motor. En esta modalidad, la amplitud de voltaje en el motor es la máxima posible y solamente se pueden controlar la frecuencia y la fase del voltaje. Esta modalidad es utilizada para velocidades superiores a la velocidad de base. La velocidad base es la velocidad del rotor cuando el flujo máximo posible es igual al flujo máximo permitido.
De acuerdo con otra idea básica de la invención, el valor mínimo de la corriente eléctrica a través de los electroimanes del estator, que es necesaria para conseguir el par deseado, se utiliza para impulsar el motor. En especial, esto es aplicable a la aceleración del rotor, por ejemplo, mientras el vehículo ferroviario es acelerado desde el reposo hasta la velocidad permanente.
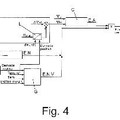
De acuerdo con la realización preferente de la invención, que se describirá a continuación, se puede introducir el par deseado en la estructura de control del motor. El par deseado del motor puede ser escogido, por ejemplo, por el conductor del vehículo ferroviario, o puede ser enviado por un sistema de control automático a la estructura de control. Otras variables de entrada a la estructura de control pueden ser: flujo de estator máximo permitido del motor, voltaje eléctrico disponible máximo para impulsar las corrientes a través de los electroimanes del estator, velocidad del motor determinada por la velocidad de rotación del rotor, ángulo máximo de carga, que es el ángulo entre el flujo del estator y el flujo del rotor con respecto al eje de rotación del rotor, y/o el valor máximo de las corrientes a través de los electroimanes del estator. La estructura de control puede producir una señal de voltaje que puede ser introducida en un modulador, y el modulador puede controlar un dispositivo para controlar directamente los conmutadores de un inversor que invierte una corriente continua activada por el voltaje disponible, en corrientes alternas a través de los electroimanes del motor. El dispositivo de control que controla directamente el inversor puede funcionar en base a la modulación de un vector espacial (SVM) . No obstante, son también posibles otros métodos para utilizar la salida de la estructura de control para activar el motor.
Un concepto básico de la invención es utilizar un controlador de flujo para controlar la magnitud del flujo del estator del motor y, en paralelo con el controlador de flujo, utilizar un controlador de ángulo de carga para controlar el ángulo de carga entre el flujo de estator y el flujo del rotor. El controlador de flujo puede enviar una medición de la magnitud de flujo que se debe producir. La medición de la magnitud de flujo puede ser, en el sistema de coordenadas estándar d-q del flujo del estator, un voltaje en la dirección de la magnitud de flujo del estator. Por otra parte, la magnitud del controlador del ángulo de carga, que es producida por el controlador de ángulo de carga para activar el ángulo de carga y, de esta manera, activar el par del motor, puede ser un voltaje ortogonal al voltaje en la dirección de la magnitud de flujo del estator. Se facilitarán ejemplos en la descripción de las figuras. La medición de la magnitud del flujo que es producida por el controlador de flujo y la medición del ángulo de carga que es producida por el controlador de ángulo de carga, se combinan preferentemente para producir la señal de referencia mencionada o, más particularmente, la referencia de voltaje.
De acuerdo con una característica de la presente invención, la información con respecto al par deseado es introducida en el controlador de flujo y en el controlador de ángulo de carga. No obstante, la información con respecto al par deseado no es utilizada directamente por el controlador de flujo y no es utilizada directamente por el controlador de ángulo de carga en todas las situaciones. El término "información con respecto al par deseado" comprende el caso en el que la señal de entrada al controlador corresponde a la diferencia entre el valor de referencia (el par deseado) y el valor real (el par real) , es decir, la información puede ser la diferencia. Para simplificar las palabras, en lo que sigue, el "par deseado", puede ser utilizado en vez de "información con respecto al par deseado". Para producir una entrada para el controlador de flujo, que es utilizada directamente por el controlador de flujo, se pueden llevar a cabo dos operaciones. De acuerdo con una operación se aplica una función predeterminada. El par deseado es el introducido en la función predeterminada, y la función... [Seguir leyendo]
Reivindicaciones:
1. Método de control de un motor síncrono (1) que tiene un estator que comprende un conjunto de electroimanes (7, 9) y que tiene un rotor (5) con imanes permanentes, de manera que el motor síncrono (1) está controlado por
- cálculo en un controlador de flujo (f) de la medida (Vd) de la magnitud de flujo, que es la magnitud del flujo del stator del motor (1) ,
- cálculo en un controlador (g) del ángulo de carga de la magnitud (Vq) del ángulo de carga, que es el ángulo entre el flujo del estator y el flujo del rotor con referencia al eje de rotación del rotor (5) , de manera que la información con respecto a un par motor deseado (Tref) o con respecto a un par motor reducido (Tlim) , que es menor que el par motor deseado, es introducida en el controlador (g) de ángulo de carga y, de manera que el controlador (g) de ángulo de carga calcula la magnitud del ángulo de carga dependiendo del par motor introducido,
- combinar la magnitud del flujo (Vd) y la magnitud del ángulo de carga (Vq) para obtener una señal ( Vref) que tiene que ser utilizada para obtener instrucciones para controlar corrientes eléctricas de los electroimanes del estator, comprobando de esta manera directamente el flujo del estator,
- calcular repetidamente un valor límite de flujo (' lim) que depende del valor máximo de un voltaje eléctrico, que se utiliza para impulsar las corrientes a través de los electroimanes (7, 9) del estator, y que depende de la velocidad real del rotor,
- durante la aceleración del rotor (5) , mientras el flujo del estator es más reducido que el flujo máximo (' max) permitido para el rotor:
• calcular la magnitud del flujo (Vd) dependiendo del resultado de una función predeterminada (f0 (T) ) , de manera que el resultado de la función predeterminada depende del par motor deseado (Tref) y corresponde a la magnitud de flujo del estator, que resulta en el par motor deseado utilizando la corriente de estator mínima posible, y
• calcular la magnitud del ángulo de carga (Vq) dependiendo del par motor deseado.
caracterizado porque
- el valor límite de flujo (' lim) calculado repetidamente depende de un valor máximo predeterminado (' max) del flujo del estator permitido para el motor (1) ,
- el motor síncrono (1) es controlado durante la aceleración adicional del rotor (5) cuando el flujo del estator ha alcanzado el flujo máximo permitido para el motor,
• calculando la magnitud de flujo correspondiente al valor límite de flujo, y
• calculando la magnitud del ángulo de carga dependiendo del par motor deseado,
de manera que el flujo del estator se mantiene constante en el flujo máximo permitido para el motor y, mientras aumenta el par motor deseado, el ángulo de carga aumenta también.
2. Método, según la reivindicación anterior, en el que el motor síncrono (1) es controlado durante la aceleración adicional del rotor (5) cuando la magnitud de las corrientes eléctricas a través de los electroimanes del estator han alcanzado un valor máximo predeterminado, • calculando la magnitud del ángulo de carga dependiendo del par motor reducido, de manera que las corrientes eléctricas se ajustan de manera continuada al valor máximo predeterminado, y de manera que el ángulo de carga aumenta mientras el flujo del estator disminuye.
3. Método, según la reivindicación anterior, en el que el motor síncrono (1) es controlado durante la aceleración adicional del rotor (5) cuando el par motor ha alcanzado un valor máximo predeterminado, • calculando la magnitud del ángulo de carga dependiendo del par motor reducido, de manera que el par motor reducido es limitado al valor máximo predeterminado, de manera que las corrientes eléctricas disminuyen, y de manera que el flujo del estator disminuye.
4. Método, según una de las dos reivindicaciones anteriores, en el que el motor síncrono (1) es controlado durante la aceleración adicional del rotor (5) , mientras el par motor deseado disminuye,
• calculando la magnitud de flujo correspondiente al valor de flujo constante, y
• calculando la magnitud del ángulo de carga dependiendo del par motor deseado, de manera que el flujo del estator es limitado al valor límite de flujo y el ángulo de carga disminuye.
5. Motor, según una de las reivindicaciones anteriores, en el que el motor síncrono (1) es un motor de propulsión de un vehículo ferroviario, y en el que el método es realizado dentro del vehículo ferroviario.
6. Disposición para el control del motor síncrono (1) que tiene un estator (3) que comprende un conjunto de electroimanes (7, 9) y que tiene un rotor (5) con imán permanente, en la que la disposición comprende:
- un controlador de flujo (f) para controlar el motor (1) calculando la magnitud (Vd) de flujo, que es la magnitud del flujo del stator del motor (1) ,
- un controlador (g) del ángulo de carga para controlar el motor (1) calculando la magnitud (Vq) del ángulo de carga, que es el ángulo entre el flujo del estator y el flujo del rotor con diferencia al eje de rotación del rotor (5) ,
- comprendiendo el controlador (g) de ángulo de carga una entrada para recibir información con respecto al par motor, que es el par motor deseado (Tref) o un par motor reducido (Tlim) que es menor que el par motor deseado, y en el que el controlador (g) de ángulo de carga está dotado para calcular la magnitud del ángulo de carga dependiendo del par motor introducido,
- un dispositivo de control (h) para combinar la magnitud del flujo (Vd) y la magnitud del ángulo de carga (Vq) para obtener una señal ( Vref) que tiene que ser utilizada para obtener instrucciones para controlar corrientes eléctricas de los electroimanes (7, 9) del estator (3) , controlando de esta manera directamente el flujo del estator,
- un dispositivo (a) para el cálculo del límite de flujo para calcular repetidamente el valor límite de flujo (\lim) que depende del valor máximo de un voltaje eléctrico, que se utiliza para impulsar las corrientes a través de los electroimanes (7, 9) del estator y que depende de la velocidad real del rotor,
- de manera que la disposición está adaptada para acelerar el rotor (5) , mientras el flujo del estator es más reducido que el flujo máximo permitido para el motor:
• calculando (b) la magnitud del flujo (Vd) dependiendo del resultado de una función predeterminada (f0 (T) ) , de manera que el resultado de la función predeterminada depende del par motor deseado (Tref) y corresponde a la magnitud del flujo del estator, que resulta en el par motor deseado utilizando la corriente de estator mínima posible, y
• calculando la magnitud del ángulo de carga (Vq) dependiendo del par motor deseado (Tref) .
caracterizada porque
- el dispositivo (a) de cálculo del límite de flujo está adaptado para calcular repetidamente el valor límite de flujo (\lim) que depende de un valor máximo predeterminado (\max) del flujo del estator permitido para el motor (1) ,
- la disposición está adaptada para acelerar adicionalmente el rotor (5) cuando el flujo del estator ha alcanzado el flujo máximo permitido para el motor,
• calculando la magnitud de flujo correspondiente al valor límite de flujo, y
• calculando la magnitud del ángulo de carga dependiendo del par motor deseado,
de manera que el flujo del estator se mantiene constante en el flujo máximo permitido para el motor y, mientras aumenta el par motor deseado, el ángulo de carga aumenta también.
7. Disposición, según la reivindicación 6, en la que la disposición está adaptada para acelerar adicionalmente el rotor (5) del motor síncrono (1) cuando la magnitud de las corrientes eléctricas que pasan a través de los electroimanes del estator han alcanzado un valor máximo predeterminado, • calculando la magnitud del ángulo de carga dependiendo del par motor reducido, de manera que las corrientes eléctricas se ajustan de manera continuada al valor máximo predeterminado, y de manera que el ángulo de carga aumenta mientras el flujo del estator disminuye.
8. Disposición, según la reivindicación anterior, en la que la disposición está adaptada a efectos de acelerar adicionalmente el rotor (5) del motor síncrono (1) cuando el par motor ha alcanzado un valor máximo predeterminado, • calculando la magnitud del ángulo de carga dependiendo del par motor reducido, de manera que el par motor reducido es limitado al valor máximo predeterminado, de manera que las corrientes eléctricas disminuyen, y de manera que el flujo del estator disminuye.
9. Disposición, según una de las dos reivindicaciones anteriores, en la que la disposición está adaptada a efectos de acelerar adicionalmente el rotor (5) , mientras el par motor deseado disminuye,
• calculando la magnitud de flujo correspondiente al valor de flujo constante, y
• calculando la magnitud del ángulo de carga dependiendo del par motor deseado, de manera que el flujo del estator es limitado al valor límite de flujo y el ángulo de carga disminuye.
10. Sistema de propulsión de un vehículo ferroviario, en el que la disposición de una de las reivindicaciones anteriores forma parte del sistema de propulsión y está adaptada para controlar un motor síncrono (1) , que es un motor de propulsión del vehículo ferroviario.
Patentes similares o relacionadas:
Procedimiento para la identificación de la anisotropía magnética de una máquina eléctrica de campo giratorio, del 13 de Mayo de 2020, de KOSTAL Drives Technology GmbH: Procedimiento para la identificación de la anisotropía magnética de una máquina eléctrica de campo giratorio que comprende un rotor y un estator, controlándose la […]
Procedimiento para la reducción de ruidos de un motor eléctrico, del 29 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para la reduccion de ruidos de un motor alimentado por un convertidor , en donde el flujo magnetico (Φ) en el motor se modifica de tal modo que el […]
Controlador de convertidor de potencia, del 8 de Mayo de 2019, de DAIKIN INDUSTRIES, LTD.: Un controlador de convertidor de potencia para controlar un convertidor de potencia cada ciclo predeterminado (T0), dicho convertidor de potencia aplicando […]
Método y sistema para hacer funcionar un generador electromecánico, del 24 de Abril de 2019, de VESTAS WIND SYSTEMS A/S: Método para hacer funcionar un generador electromecánico , en el que el generador electromecánico es un generador de imanes permanentes interiores, comprendiendo […]
 Dispositivo de control de motor eléctrico, del 21 de Noviembre de 2018, de DAIKIN INDUSTRIES, LTD.: Controlador de motor eléctrico que es un dispositivo para controlar un flujo magnético primario ([λ1]) en un motor eléctrico rotativo que […]
Dispositivo de control de motor eléctrico, del 21 de Noviembre de 2018, de DAIKIN INDUSTRIES, LTD.: Controlador de motor eléctrico que es un dispositivo para controlar un flujo magnético primario ([λ1]) en un motor eléctrico rotativo que […]
Sistema de control para un generador eléctrico y método para controlar un generador eléctrico para una turbina eólica, del 8 de Marzo de 2017, de VESTAS WIND SYSTEMS A/S: Método para validar un sistema de control para un generador eléctrico conectado a un convertidor de potencia en una turbina eólica , comprendiendo […]
Identificación de perfil de inductancia de generador de imán permanente, del 16 de Abril de 2014, de VESTAS WIND SYSTEMS A/S: Un procedimiento para determinar una inductancia de una máquina de PM durante el funcionamiento de dicha máquina de PM, comprendiendo el procedimiento las etapas de: a) […]
 MÉTODO DE REGULACIÓN DEL PAR ELECTROMAGNÉTICO DE MOTORES ELÉCTRICOS DE TRACCIÓN DE VEHÍCULOS FERROVIARIOS, del 18 de Febrero de 2013, de CAF POWER & AUTOMATION, S.L.U: Método de regulación del par electromagnético de motores eléctricos de tracción de vehículos ferroviarios, que emplea unos inversores que toman una tensión continúa para […]
MÉTODO DE REGULACIÓN DEL PAR ELECTROMAGNÉTICO DE MOTORES ELÉCTRICOS DE TRACCIÓN DE VEHÍCULOS FERROVIARIOS, del 18 de Febrero de 2013, de CAF POWER & AUTOMATION, S.L.U: Método de regulación del par electromagnético de motores eléctricos de tracción de vehículos ferroviarios, que emplea unos inversores que toman una tensión continúa para […]