SISTEMA PARA MANIPULAR CONOS EN UNA VIA.
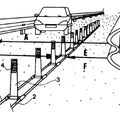
Sistema para manipular conos en una vía.El sistema instalado en un vehículo (14) integra un brazo robotizado (10) con dispositivo de agarre para atrapar y liberar conos (12),
un sistema de detección (13) de conos (12), unos medios de accionamiento del brazo (10) entre una posición de recogida del cono (12) y una posición de descarga del cono (12) en una zona de almacenamiento y unos medios para posicionar conos (12) a una distancia regular sobre dicha vía. El dispositivo de agarre comprende un miembro alargado (11) que sobresale en voladizo de un lateral del vehículo (14) previsto para enfrentarse con dichos conos (12) cuando el vehículo (14) circula marcha atrás. El miembro alargado (11) integra una semipinza fija (15) y una semipinza móvil (16), movible en acercamiento - alejamiento de dicha semipinza fija (15) para atrapar y sujetar entre ambas un extremo superior del cono (12)
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200900720.
Solicitante: AUTOPISTAS CONCESIONARIA ESPAÑOLA S.A..
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: ARNALDOS,ENRIQUE NICOLAS, CASTELLTORT VENTURA,RAMON.
Fecha de Solicitud: 6 de Marzo de 2009.
Fecha de Publicación: .
Fecha de Concesión: 10 de Junio de 2011.
Clasificación Internacional de Patentes:
- E01F9/014
Clasificación PCT:
- E01F9/014
Fragmento de la descripción:
Sistema para manipular conos en una vía.
Sector de la técnica
La presente invención concierne en general a un sistema para manipular unos conos de delimitación o señalización de una vía, y en particular a un sistema instalado en un vehículo para recoger y/o posicionar automáticamente conos en una vía de tránsito.
Estado de la técnica anterior
Se conocen en el estado de la técnica diversos sistemas de recogida y posicionamiento de conos en una vía.
En particular, la patente EP-B1-0501106 concierne a un aparato y a un método para posicionar y recoger conos de una vía. El aparato descrito en esta patente comprende unos medios para ascender y descender los conos, unos medios para corregir la postura de los conos, sensores y medios de agarre en forma de pinza para recoger y colocar conos en la vía. La recogida de los conos se realiza, con el vehículo circulando marcha atrás, cuando éstos se encuentran en su posición de pie, agarrándolos por su cuerpo. En cuanto al posicionamiento de los conos, éste se realiza con el vehículo circulando en el sentido de la marcha.
Por otro lado, la patente EP-B1-1112411 describe un aparato para la recogida automática de conos de la superficie de una carretera con un vehículo circulando opcionalmente marcha adelante o marcha atrás. Este aparato se encuentra montado adyacente a un lateral del vehículo y comprende un brazo elevador operado mediante unos medios de maniobra entre una posición de ascenso y una posición de descenso. El citado brazo elevador tiene asociados unos medios de agarre configurados para agarrar un cono por su base cuando el cono no se encuentra en su posición de pie, es decir, se encuentra tumbado en la vía. Estos medios de agarre son activados por un sensor que detecta la presencia del cono en una posición relativa al aparato.
La solicitud de patente WO-A1-2005071167 describe un aparato y un método para recoger conos donde el aparato comprende un brazo de elevación provisto de unos medios de agarre diseñados para coger el cono introduciéndose al menos parcialmente en el interior de las paredes del cono por su base. Un sensor detecta si los medios de agarre se encuentran posicionados en el interior del citado cono. Además, los medios de agarre están provistos de una superficie colindante donde puede descansar el lateral del cono, por lo que el cono se coloca en una posición predeterminada respecto a los medios de agarre para ser maniobrado de forma segura y precisa. El aparato comprende también unos medios para volcar los conos y unos medios de posicionamiento de los mismos para que sea más sencilla su recogida por su parte inferior. Asimismo, el citado aparato puede comprender unos medios para poner de pie un cono volcado si es necesario.
La presente invención propone un sistema alternativo a los descritos de recogida y posicionamiento automático de conos en una vía con un dispositivo de agarre diferente a los anteriormente expuestos, el cual permite abarcar una superficie más amplia donde localizar el cono para su recogida.
Explicación de la invención
La presente invención concierne a un sistema para manipular de manera automática o semiautomática conos en una vía, instalado en un vehículo, del tipo que comprende:
Conforme a la presente invención el citado dispositivo de agarre comprende además:
Este miembro alargado, que sobresale perpendicularmente a la dirección longitudinal del vehículo, está formado por:
El extremo distal del brazo robotizado comprende además unos medios de regulación y verificación de la altura respecto al suelo del brazo, los cuales permiten mantener el citado miembro alargado a una altura uniforme del suelo durante el proceso de recogida de los conos.
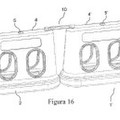
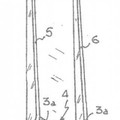
Por otro lado, en una realización preferida de la presente invención, la semipinza fija y la semipinza móvil están formadas por dos barras sustancialmente paralelas que tienen asociados unos respectivos perfiles de sección triangular, en funciones de mandíbula de pinza. El hecho de utilizar dos barras alargadas permite abarcar, por barrido, una mayor área transversal donde localizar el cono para su recogida, al poder atraparlo siempre que se encuentre, en su posición de pie, dentro de la zona localizada entre ambos extremos de estas barras.
El citado movimiento de acercamiento y alejamiento de la semipinza móvil a la semipinza fija se lleva a cabo mediante un movimiento lineal combinado con un movimiento de giro respecto a un eje longitudinal de la semipinza móvil de manera que en la posición activa, las dos mandíbulas apuntan al suelo al atrapar por pinzado el extremo del cono y en la posición de reposo, la mandíbula de la semipinza móvil queda orientada en una dirección opuesta al suelo.
Así, la semipinza móvil está guiada linealmente, para su desplazamiento entre dicha posición de reposo y dicha posición activa, llevando esta semipinza móvil, en una realización preferida de la presente invención, fijado un piñón coaxial con el eje longitudinal de la misma y engranado con una cremallera fija dispuesta paralelamente a la dirección del movimiento lineal. En cuanto a los medios de accionamiento, éstos están constituidos por unos actuadores lineales ligados a cada uno de los extremos de la semipinza móvil y dispuestos para efectuar el movimiento lineal con la coadyuvación del citado piñón cremallera y con ello ocasionar dicho movimiento de giro de la semipinza móvil.
En referencia al brazo robotizado, éste comprende, asimismo, en un extremo proximal del mismo, un grupo motriz de giro adaptado para, una vez atrapado el cono por la semipinza fija y la semipinza móvil, realizar un primer giro del brazo robotizado sobre un eje sustancialmente horizontal, desde la posición de recogida hasta una posición intermedia entre la posición de recogida y la posición de descarga, y un segundo giro desde la citada posición intermedia hasta una posición de descarga.
El citado grupo motriz de giro del brazo robotizado se encuentra instalado sobre una unidad de desplazamiento lineal, transversal a la dirección longitudinal del vehículo, que comprende unos medios de accionamiento aptos para desplazar el brazo robotizado en la citada posición intermedia, tras haber realizado el primer giro, linealmente en acercamiento hacia la zona de descarga, quedando de este modo la semipinza fija y la semipinza móvil en una posición adecuada para poder ser introducidas en el interior del vehículo por la abertura trasera del mismo. Después de este desplazamiento lineal del brazo robotizado, se realiza el segundo giro del mismo, depositando el cono sobre una banda de transporte que comprende unos medios de conducción que llevan al cono hasta la citada zona de almacenamiento.
El dispositivo de agarre comprende además un elemento en funciones de tope escamoteable, situado, en su posición extendida, a una altura próxima a la base...
Reivindicaciones:
1. Sistema para manipular conos en una vía, instalado en un vehículo (14), del tipo que integra:
caracterizado porque dicho dispositivo de agarre comprende:
2. Sistema según la reivindicación 1, caracterizado porque dicho extremo distal integra unos medios de regulación y verificación de la altura (17) respecto al suelo de dicho brazo (10) en posición de recogida de conos (12).
3. Sistema según la reivindicación 1 caracterizado porque dicha semipinza fija (15) y dicha semipinza móvil (16) comprenden dos barras sustancialmente paralelas que tienen asociados unos respectivos perfiles de sección triangular, en funciones de mandíbula de pinza (15a), (16a).
4. Sistema según la reivindicación 1, caracterizado porque dicho miembro alargado (11) sobresale perpendicularmente respecto a la dirección longitudinal del vehículo (14) por el lado derecho o izquierdo del vehículo.
5. Sistema según la reivindicación 1, caracterizado porque dicho movimiento de acercamiento y alejamiento de la semipinza móvil (16) a la semipinza fija (15) se lleva a cabo mediante un movimiento lineal combinado con un movimiento de giro respecto a un eje longitudinal de dicha semipinza móvil (16) de manera que en dicha posición activa, las dos mandíbulas (15a, 16a) apuntan al suelo al atrapar por pinzado el extremo del cono (12) y en dicha posición de reposo la mandíbula (16a) de la semipinza móvil (16) queda orientada en una dirección opuesta al suelo.
6. Sistema según la reivindicación 5, caracterizado porque dicha semipinza móvil (16) está guiada linealmente, para su desplazamiento entre dicha posición de reposo y dicha posición activa, llevando, dicha semipinza móvil (16), fijado un piñón (36) coaxial con dicho eje longitudinal de la misma y engranado con una cremallera fija (37) dispuesta paralelamente a la dirección del movimiento lineal, estando los citados medios de accionamiento constituidos por unos actuadores lineales (18) ligados a cada uno de los extremos de la semipinza móvil (16) y dispuestos para efectuar el movimiento lineal con la coadyuvación del citado piñón (36) y la citada cremallera fija (37) y con ello ocasionar dicho movimiento de giro y elevación de la semipinza móvil (16).
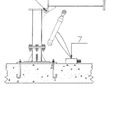
7. Sistema según la reivindicación 1, caracterizado porque dicho brazo robotizado (10) comprende, en un extremo proximal, un grupo motriz de giro (19) adaptado para, una vez atrapado dicho cono por la semipinza fija (15) y la semipinza móvil (16), realizar un primer giro de dicho brazo robotizado (10) sobre un eje sustancialmente horizontal, desde dicha posición de recogida hasta una posición intermedia entre dicha posición de recogida y dicha posición de descarga, y un segundo giro desde dicha posición intermedia hasta dicha posición de descarga.
8. Sistema según la reivindicación 7, caracterizado porque dicho grupo motriz de giro (19) está instalado sobre una unidad de desplazamiento lineal (20), transversal a dicha dirección longitudinal del vehículo (14), comprendiendo dicha unidad de desplazamiento lineal (20) unos medios de accionamiento aptos para desplazar, dicho brazo robotizado (10) en dicha posición intermedia, tras haber realizado dicho primer giro, linealmente en acercamiento hacia dicha zona de descarga, quedando de este modo dicha semipinza fija (15) y dicha semipinza móvil (16) en una posición adecuada para poder ser introducidas en el interior de dicho vehículo (14) por dicha abertura trasera (21).
9. Sistema según la reivindicación 7, caracterizado porque comprende una banda de transporte (22) en el interior del vehículo (14) sobre la cual es depositado el cono (12) tras dicho segundo giro, comprendiendo dicha banda de transporte (22) unos medios de conducción para conducir el cono (12) hasta dicha zona de almacenamiento.
10. Sistema según la reivindicación 7, caracterizado porque dicho dispositivo de agarre comprende además un elemento en funciones de tope escamoteable (23), situado, en su posición extendida, a una altura próxima a la base del cono (12), para soportar parte del cuerpo del cono (12) y evitar así su vuelco cuando se realiza el agarre del cono.
11. Sistema según la reivindicación 10, caracterizado porque dicho tope escamoteable (23) comprende un listón asociado a un arco sujeto al chasis del vehículo.
12. Sistema según la reivindicación 1, caracterizado porque dicho sistema de detección (13) es un sistema óptico de detección que genera una barrera óptica (24) por delante de dicha semipinza fija (15).
13. Sistema según la reivindicación 1, caracterizado porque dichos medios para posicionar conos (12) sobre dicha vía, a ambos lados del vehículo, comprenden:
14. Sistema, según la reivindicación 13, caracterizado porque dicha rampa de descarga está soportada con unas ruedas (34) de apoyo en el suelo, conectada a dicho carro transportador (35) por el extremo inferior del mismo, comprendiendo dicha rampa de descarga (33) una serie de rodillos de giro libre con ejes alineados en un mismo plano que permiten depositar el cono (12) en la vía de manera suave evitando el vuelco del mismo.
15. Sistema, según la reivindicación 1, caracterizado porque dicho miembro alargado (11) sobresale por una abertura trasera (21) del vehículo, extendiéndose transversalmente a la vía.
Patentes similares o relacionadas:
 BARRERA CAMINERA, ELEMENTO DE UNIÓN, SISTEMA ARTICULADO Y PROCEDIMIENTO DE INTERCONEXIÓN DE BARRERAS CAMINERAS, del 29 de Octubre de 2015, de WENCO S.A: La presente invención se refiere a una barrera caminera para la señalización y el direccionamiento del tráfico de vehículos y/o personas y a un sistema articulado […]
BARRERA CAMINERA, ELEMENTO DE UNIÓN, SISTEMA ARTICULADO Y PROCEDIMIENTO DE INTERCONEXIÓN DE BARRERAS CAMINERAS, del 29 de Octubre de 2015, de WENCO S.A: La presente invención se refiere a una barrera caminera para la señalización y el direccionamiento del tráfico de vehículos y/o personas y a un sistema articulado […]
 Baliza de vialidad, del 18 de Abril de 2012, de Nadia Signalisation: Baliza de vialidad formada en una hoja fina, comprendiendo un panel sensiblemente rectangular, a una extremidad del cual está implantado un pie de […]
Baliza de vialidad, del 18 de Abril de 2012, de Nadia Signalisation: Baliza de vialidad formada en una hoja fina, comprendiendo un panel sensiblemente rectangular, a una extremidad del cual está implantado un pie de […]
BASE PARA VALLA MOVIL., del 16 de Mayo de 2005, de CAPKA PLAST KUNSTSTOFFVERARBEITUNG GMBH: Base para valla móvil, con una superficie de apoyo , con una cara superior opuesta a la superficie de apoyo , con al menos un dispositivo para alojar un […]
DISPOSITIVO DE AYUDA A LA RECOGIDA Y A LA COLOCACION DE OBJETOS EN EL SUELO., del 16 de Septiembre de 1995, de CONSTRUCTIONS INDUSTRIELLES DU RHONE CIR S.A.: EL DISPOSITIVO COMPRENDE UN CONJUNTO DE SOPORTE MODULABLE (E) ADAPTABLE SOBRE UN VEHICULO (V), SIENDO APTO DICHO CONJUNTO PARA RECIBIR ELEMENTOS CONVENIENTEMENTE […]
 SOPORTE DE ANCLAJE ABATIBLE PARA SEÑALIZACION VERTICAL, del 14 de Enero de 2010, de SERVICIOS E INSTALACIONES CANTUDO S.L.: 1. Soporte de anclaje abatible para señalización vertical, caracterizado porque comprende una estructura mecánica que permite el abatimiento […]
SOPORTE DE ANCLAJE ABATIBLE PARA SEÑALIZACION VERTICAL, del 14 de Enero de 2010, de SERVICIOS E INSTALACIONES CANTUDO S.L.: 1. Soporte de anclaje abatible para señalización vertical, caracterizado porque comprende una estructura mecánica que permite el abatimiento […]
 DISPOSITIVO MOVIL DE SEÑALIZACION EN EL SUELO PARA VIAS DE CIRCULACION DE VEHICULOS, del 16 de Septiembre de 2007, de SEC ENVEL S.A.R.L.: EL DISPOSITIVO ESTA DESTINADO A LA SEÑALIZACION EN EL SUELO PARA VIAS DE CIRCULACION DE VEHICULOS. CONSISTE EN UN CONJUNTO QUE COMPRENDE POR UNA PARTE AL MENOS UN ELEMENTO […]
DISPOSITIVO MOVIL DE SEÑALIZACION EN EL SUELO PARA VIAS DE CIRCULACION DE VEHICULOS, del 16 de Septiembre de 2007, de SEC ENVEL S.A.R.L.: EL DISPOSITIVO ESTA DESTINADO A LA SEÑALIZACION EN EL SUELO PARA VIAS DE CIRCULACION DE VEHICULOS. CONSISTE EN UN CONJUNTO QUE COMPRENDE POR UNA PARTE AL MENOS UN ELEMENTO […]