METODO PARA DETERMINACION DE PARAMETROS CONSTRUCTIVOS OPTIMOS APLICABLE A UN MOTOR LINEAL DE RELUCTANCIA CONMUTADA.
Método para determinación de parámetros constructivos óptimos aplicable a un motor lineal de reluctancia conmutada.
En un LSRM dotado de un estator o primario y un actuador o secundario, móvil respecto a un eje x, configurados para estar en una disposición de acoplamiento magnético mutuo, el método comprende configurar unas superficies tridimensionales cóncavas obtenidas a partir de computar para cada pareja b{sub,p} y b{sub,s} la fuerza resultante de aplicar una determinada densidad de corriente eléctrica de excitación (J), mínima, para un determinado número de posiciones intermedias del actuador, espaciadas por intervalos inc_x, de desplazamiento de dicho actuador, expresando la zona a mayor altura de dicha superficie la zona óptima de fuerza A partir de dichas superficies tridimensionales, y para distintos valores de J, dentro de unos límites operativos se obtiene una configuración óptima del dispositivo respecto a las variables b{sub,p} y b{sub,s}
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200802586.
Solicitante: UNIVERSITAT POLITÈCNICA DE CATALUNYA UNIVERSITAT ROVIRA I VIRGILI.
H02K15/00ELECTRICIDAD. › H02PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02K MAQUINAS DINAMOELECTRICAS (relés dinamoeléctricos H01H 53/00; transformación de una potencia de entrada en DC o AC en una potencia de salida de choque H02M 9/00). › Métodos o aparatos especialmente adaptados para la fabricación, montaje, mantenimiento o reparación de máquinas dinamoeléctricas.
Clasificación PCT:
H02K41/03H02K […] › H02K 41/00 Sistemas de propulsión en los cuales un elemento rígido se desplaza a lo largo de un camino bajo los efectos de la acción dinamoeléctrica que se ejercen entre este elemento y un flujo magnético que se propaga a lo largo del camino. › Motores síncronos; Motores paso a paso; Motores de reluctancia (H02K 41/035 tiene prioridad).
Fragmento de la descripción:
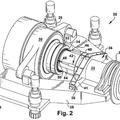
Método para determinación de parámetros constructivos óptimos aplicable a un motor lineal de reluctancia conmutada. Campo de la técnica La presente invención concierne a un método susceptible de implementarse por ordenador, aplicable a un motor lineal de reluctancia conmutada (LSRM de sus siglas en inglés) del tipo que comprende un estator o primario y un actuador o secundario, móvil respecto a un eje x, configurados para estar en una disposición de acoplamiento magnético mutuo en donde dicho actuador integra en dos caras opuestas un determinado número de polos equidistantes, distribuidos perpendiculares a dicho eje del movimiento y susceptibles de quedar alineados al desplazarse a una serie de polos equidistantes de dicho estator que tienen asociadas unas bobinas de excitación. Los citados motores pueden utilizarse en aplicaciones de elevada densidad de fuerza para impartir movimiento bajo demanda a componentes mecánicos tales como palancas o correderas, o para desplazar de forma controlada carros portadores de dispositivos diversos, en sustitución de actuadores neumáticos o hidráulicos. Antecedentes de la invención La solicitud WO94/26020 divulga un actuador lineal del tipo citado. Se conocen varios artículos en donde se considera la sensibilidad de varios parámetros geométricos en motores de reluctancia conmutada rotativos (SMR), pudiendo citar a tal efecto Arumugam R. Lindsay J. F. Krishnan R., Sensitivity of pole arc/pole pitch ratio on switched reluctance motor performance, IEEE Industry Applications Society Annual Meeting. 1988, vol.1, pp.50-54, y Murthy S. S., Singh B., Sharma V. K., y Finite element analysis to achieve optimum geometry of switched reluctance motor, TENCON 98. IEEE Región 10th International Conference on Global Connectivity in Energy, Computer, Communication and Control, vol.2, No., pp.414-418. 1998. La US 6.593.720 describe un método para optimizar parámetros de rendimiento de un motor de reluctancia conmutada que comprende tomar en consideración los parámetros de al menos tres funcionalidades del motor seleccionando dichos parámetros a partir del grupo que comprende ángulos de disparo, potencia en el árbol del motor, rendimiento del accionamiento, coeficiente de par de rizado, par de salida, par por RMS (valor cuadrático medio), corriente por ciclo, par por amperaje medio, consumo de energía, nivel de corriente en la fase objetivo, tamaño de banda de histéresis, ciclo de trabajo, voltaje CC y lazo de control de cero voltios. El método propone el trazado de los parámetros en una gráfica x-y o x-y-z, y la representación de todos los parámetros en una gráfica y a partir de la misma establecer el rendimiento óptimo de al menos tres parámetros. El método permite encontrar los ángulos de disparo óptimos y otros parámetros como el ciclo de trabajo y también es aplicable a una máquina de reluctancia conmutada operando como generador. La presente invención propone un método distinto para optimizar parámetros constructivos de un LSRM, aunque también es aplicable a un motor de reluctancia conmutada rotativo y dicho método es igualmente útil para dicha máquina de reluctancia conmutada cuando deba operar como generador. Exposición de la invención Según es conocido la forma para designar los LSRM sigue el siguiente patrón: (m-k-Np/Ns-M) donde m es el número de fases, k el numero de caras (k=1 simple cara, k-2 doble cara), Np número de polos por sección y cara del primario, Ns número de polos por sección y cara del secundario, M es el número de secciones (ver Figs. 1 y 2). Para asegurar el arranque del LSRM en cualquier posición y dirección tiene que cumplirse que el mínimo común múltiplo de Np y Ns sea el producto del número de fases (m) por el número de polos del secundario por sección y cara (Ns), expresándose mediante: La ecuación (1) se cumple si el número de polos del secundario (Ns) se adopta en función del número de fases (m) según: 2 ES 2 351 638 A1 El número de polos del primario por sección y cara (Np), siempre cumple: Los pasos polares del primario TP y secundario Ts se pueden expresar a partir de las cotas representadas en la Fig. 2 como: siendo bp la anchura de polo primario, cp la anchura de la ranura del primario. Para el secundario bs es la anchura del polo y c s la anchura de ranura. La longitud de una sección (L, ver fig. 1b), se obtiene a partir de: Se define el paso (PS) como la distancia que recorre el actuador después de excitar dos fases consecutivas, siendo: Los primeros estudios desarrollados POR [Lawrenson P. J, Stephenson J. M., Blenkinsop P. T., Corda J., Fulton N. N., Variable-speed switched reluctance motors, IEE Proceedings-B electric power applications. vol.127 (No.4) July 1980, pp. 253-265., referido en adelante como [LAW 80] han determinado los intervalos en los que han de estar comprendidas las anchuras de polo del primario (b p) y secundario (b s) para garantizar la factibilidad del diseño y operatividad de los motores rotativos de reluctancia conmutada. Los valores de (b p) y (b s) límite se describen mediante las tres condiciones siguientes: La representación de las condiciones (c1), (c2) y (c3) en los ejes bp y bs delimitan la superficie del triangulo ABC representado en la Fig. 3. De la Fig. 3 se deducen los vértices del triangulo ABC: El método de determinación de los valores de bp y bs que maximizan la fuerza media de un LSRM constituye el objetivo de la presente invención. El método es igualmente aplicable a un motor de reluctancia conmutada rotativo, en cuyo caso en lugar de fuerza lineal se considerará el par de accionamiento del motor y bp y bs serán los arcos del polo del estator y del rotor. 3 ES 2 351 638 A1 Conforme a la propuesta de esta invención y considerando un motor lineal de reluctancia conmutada en donde bp es la anchura de polo del estator o primario, cp la anchura de la ranura del estator entre dos polos y para el actuador o secundario bs, es la anchura del polo y cs la anchura de ranura y cumpliendo dicho motor lineal para ser operativo las citadas relaciones (c1, c2 y c3), el método para evaluar y determinar los parámetros b p y b s para maximizar la fuerza media de un LSRM comprende, para una densidad de corriente eléctrica de excitación J, mínima, fijada como punto de partida, las siguientes etapas: a) fijar constantes los parámetros transversales en dos direcciones perpendiculares a dicho eje x, y la profundidad del grueso del hierro Lw del secundario, el número de polos Np, Ns y el número de fases (m) y el paso (PS); b) establecer unos intervalos de variación inc_bs e inc_bp y representar unos puntos de análisis en un diagrama cartesiano de ejes b p y b s incluyendo sobre dichos ejes los citados incrementos (Fig. 6), con lo que se obtiene una matriz bidimensional de puntos de análisis; c) computar para cada punto de análisis (combinación de bp, bs) la fuerza estática resultante de aplicar la citada densidad de corriente J fijada en la etapa a), para un determinado número de posiciones intermedias del actuador, espaciadas por intervalos inc_x, de desplazamiento de dicho actuador entre las posiciones de alineación de los polos (x=Ts/2) y desalineación total de los polos (x=0) obteniendo para cada punto de análisis y posición un valor de fuerza y proporcionando los distintos valores de fuerza un perfil de fuerza en función de la posición x; d) representar el conjunto de dichos perfiles de fuerza en tres dimensiones sobre el citado diagrama cartesiano de ejes bs, bp siendo el tercer eje F representativo del valor de la fuerza media, obteniendo una superficie tridimensional cóncava cuya zona de mayor altura expresa la zona óptima, siendo representada su proyección en el plano b p-b s; e) repetir los apartados a) - d), para una serie de valores de densidad de corriente J (mediante pequeños incrementos (inc_J)) hasta alcanzar el máximo valor de la citada densidad de corriente J que el dispositivo tenga previsto soportar, y f) obtener la intersección de dichas proyecciones en el plano bp-bs que proporcionara una configuración óptima del dispositivo respecto a las variables bp y bs. Los parámetros transversales fijados son Ip (longitud del polo primario), Is (distancia entre extremos de los polos del secundario), Isp (profundidad de la ranura del secundario), hy (grosor de la placa del primario) y g (holgura entre polos del primario y actuador). El método proporciona los parámetros geométricos bp y bs que permiten optimizar tanto la fuerza media como la proporción de inductancia del LSRM. Las anteriores y otras características y ventajas se comprenderán más plenamente a partir de la siguiente descripción detallada de un ejemplo de realización con referencia a los dibujos adjuntos. Breve descripción de los dibujos La Fig. 1 es una vista 3D de conjunto de un LSRM 4-2-8/6-3. La Fig. 2 es una vista en sección de un LSRM ilustrando...
Reivindicaciones:
1. Método para determinación de parámetros constructivos óptimos aplicable a un motor lineal de reluctancia conmutada del tipo que comprende un estator o primario y un actuador o secundario, móvil respecto a un eje x, configurados para estar en una disposición de acoplamiento magnético mutuo en donde dicho actuador integra en dos caras opuestas un determinado número de polos equidistantes, distribuidos perpendiculares a dicho eje del movimiento y susceptibles por dicho movimiento de quedar alineados a una serie de polos equidistantes de dicho estator que tienen asociadas unas bobinas de excitación en donde los pasos polares del primario TP y secundario TS se expresan como: siendo b p la anchura de polo del estator c p la anchura de la ranura del estator entre dos polos y para el actuador b s, es la anchura del polo y c s la anchura de ranura debiendo de cumplir dicho motor lineal para ser operativo las siguientes relaciones: caracterizado porque para una densidad de corriente eléctrica de excitación J, mínima, fijada como punto de partida, comprende las siguientes etapas: a) fijar constantes unos parámetros transversales en dos direcciones perpendiculares a dicho eje x, y la profundidad del grueso del hierro Lw del secundario, el número de polos Np, Ns y el número de fases (m) y el paso (PS), siendo dichos parámetros transversales fijados Ip (longitud del polo primario), Is (distancia entre extremos de los polos del secundario), Isp (profundidad de la ranura del secundario), hy (grosor de la placa del primario) y g (holgura entre polos del primario y actuador); b) establecer unos intervalos de variación inc_bs e inc_bp y representar unos puntos de análisis en un diagrama cartesiano de ejes bp y bs incluyendo sobre dichos ejes los citados incrementos, con lo que se obtiene una matriz bidimensional de puntos de análisis; c) computar para cada punto de análisis (combinación de bp, bs) la fuerza estática resultante de aplicar la citada densidad de corriente J fijada en la etapa a), para un determinado número de posiciones intermedias del actuador, espaciadas por intervalos inc_x, de desplazamiento de dicho actuador entre las posiciones de alineación de los polos (x=T S/2) y desalineación total de los polos (x=0) obteniendo para cada punto de análisis y posición un valor de fuerza y proporcionando los distintos valores de fuerza un perfil de fuerza en función de la posición x y porque a partir del conjunto de valores de fuerza que forman dicho perfil de fuerza para cada punto de análisis y posición se obtiene un valor medio que se asigna al punto de análisis; d) representar el conjunto de dichos perfiles de fuerza en tres dimensiones sobre el citado diagrama cartesiano de ejes bs, bp siendo el tercer eje F representativo del valor de la fuerza, obteniendo una superficie tridimensional cóncava cuya zona a mayor altura expresa la zona óptima e) repetir los apartados a) - d), para una serie de valores de densidad de corriente (J) hasta alcanzar el máximo valor de J que el dispositivo tenga previsto soportar, obteniendo una serie de superficies tridimensionales, para cada valor, y f) obtener a partir de dichas superficies tridimensionales una configuración óptima del dispositivo respecto a las variables b p y b s que tiene una zona de valor máximo. 6 ES 2 351 638 A1 2. Método según la reivindicación 1, caracterizado porque en las etapas d) y e) se obtiene la proyección de dicha superficie tridimensional cóncava en el plano bp-bs, y porque por intersección de dichas proyecciones se obtiene una configuración óptima del dispositivo respecto a las variables bp y bs que tiene una zona de valor máximo. 3. Método según la reivindicación 1, caracterizado porque dicho valor medio asignado al punto de análisis se obtiene por aplicación del método de integración de Simpson. 4. Método según la reivindicación 1, caracterizado porque los citados intervalos inc_x, de desplazamiento del actuador en la etapa c) son intervalos iguales. 5. Método según la reivindicación 1, caracterizado porque para motores de reluctancia conmutada rotativos se aplicarán igualmente las etapas a) a f) en donde en lugar de fuerza lineal se considerará el par y bp y bs serán los arcos del polo del estator y del rotor. 6. Método según la reivindicación 1, caracterizado porque cuando los polos del rotor se proporcionan a partir de un paquete de chapas ferromagnéticas, adosadas, el parámetro Lw es el grosor total de dichas chapas. 7 ES 2 351 638 A1 8 ES 2 351 638 A1 9 ES 2 351 638 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
Patentes similares o relacionadas:
Aparato y procedimiento para retirar anillos deslizantes de maquinaria eléctrica rotativa, del 27 de Mayo de 2020, de GENERAL ELECTRIC COMPANY: Elemento de fijación adaptado para retirar un conjunto de anillos deslizantes para una máquina eléctrica rotativa de corriente alterna […]
Módulo de interfaz y método de comunicación con una máquina eléctrica, del 27 de Mayo de 2020, de Regal Beloit America, Inc: Un módulo de interfaz configurado para acoplarse de forma extraíble a una máquina eléctrica , comprendiendo dicho módulo de interfaz :
un dispositivo de […]
Generador síncrono de una turbina eólica sin engranajes, del 4 de Diciembre de 2019, de Wobben Properties GmbH: Generador síncrono para una turbina eólica sin engranajes , que comprende
- un estator ,
- un eje de rotación y
[…]
Devanados conductores múltiples moleteados, del 4 de Diciembre de 2019, de HAMILTON SUNDSTRAND CORPORATION: Un estator que comprende:
un conjunto de devanados, comprendiendo dicho conjunto de devanados:
una pluralidad de devanados , incluyendo […]
Aparato para el enrollado y terminación de partes centrales de maquinas dinamo-electricas, del 20 de Noviembre de 2019, de ATOP S.P.A.: Aparatos para el devanado y la terminación de bobinas devanadas con al menos un cable eléctrico (W) en un núcleo de una máquina eléctrica de […]
Procedimiento y sistema para desacoplar un acoplamiento retráctil en un aerogenerador, del 30 de Octubre de 2019, de GENERAL ELECTRIC COMPANY: Procedimiento para desacoplar un acoplamiento retráctil que sujeta un eje a un componente de un tren de transmisión en un aerogenerador […]
Dispositivo de bobinado ondulado y procedimiento para fabricar un bobinado ondulado, del 17 de Julio de 2019, de Aumann Espelkamp GmbH: Dispositivo de bobinado ondulado que comprende:
un dispositivo de alimentación que proporciona al menos un alambre de bobinado a través de […]
Rotor de una máquina de reluctancia sincrónica, del 9 de Mayo de 2019, de SIEMENS AKTIENGESELLSCHAFT: Rotor , en particular de una máquina de reluctancia sincrónica que puede funcionar directamente en una red de abastecimiento eléctrica, presentando el rotor […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Procedimiento y sistema para desacoplar un acoplamiento retráctil en un aerogenerador, del 30 de Octubre de 2019, de GENERAL ELECTRIC COMPANY: Procedimiento para desacoplar un acoplamiento retráctil que sujeta un eje a un componente de un tren de transmisión en un aerogenerador […]
Procedimiento y sistema para desacoplar un acoplamiento retráctil en un aerogenerador, del 30 de Octubre de 2019, de GENERAL ELECTRIC COMPANY: Procedimiento para desacoplar un acoplamiento retráctil que sujeta un eje a un componente de un tren de transmisión en un aerogenerador […]