MÉTODO DE CONTROL Y CONTROLADOR PARA UN SISTEMA MECÁNICO-HIDRÁULICO.
Método de control de posición para un sistema mecánico-hidráulico con un grado de libertad para cada actuador hidráulico,
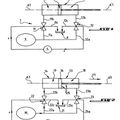
como un elemento controlado, y con sensores de medición (6, 8) para medir la presión de un sistema hidráulico y para medir la posición del actuador hidráulico caracterizado porque la presión deseada del sistema hidráulico se considera preferentemente como el término ( - ph) en el sistema de control, y la velocidad vh del actuador hidráulico (3) se integra como una amortiguación del sistema de control, en donde el valor deseado y la velocidad del actuador hidráulico vh se determinan mediante un observador, y en donde la velocidad del actuador hidráulico vh se integra a la señal de salida del controlador (R)
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/063684.
Solicitante: Siemens VAI Metals Technologies GmbH.
Nacionalidad solicitante: Austria.
Dirección: TURMSTRASSE 44 4031 LINZ AUSTRIA.
Inventor/es: KEINTZEL,Georg, GRABMAIR,Gernot, SCHLACHER,Kurt.
Fecha de Publicación: .
Fecha Solicitud PCT: 29 de Junio de 2006.
Clasificación Internacional de Patentes:
- F15B21/04J
- F15B9/09 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F15 DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO; HIDRAULICA O NEUMATICA EN GENERAL. › F15B SISTEMAS QUE FUNCIONAN POR MEDIO DE FLUIDOS EN GENERAL; DISPOSITIVOS ACCIONADORES POR PRESION DE UN FLUIDO, p. ej. SERVOMOTORES; DETALLES DE LOS SISTEMAS DE FLUIDO A PRESION, NO PREVISTOS EN OTRO LUGAR. › F15B 9/00 Servomotores con acción de seguimiento, es decir, en los cuales la posición del órgano accionado corresponde a la del órgano que controla. › con medios de control eléctricos.
Clasificación PCT:
- F15B9/09 F15B 9/00 […] › con medios de control eléctricos.
- G05B13/04 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › que implican el uso de modelos o de simuladores.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
PDF original: ES-2360877_T3.pdf
Fragmento de la descripción:
La presente invención hace referencia a un método de control para un sistema mecánico-hidráulico, con un grado de libertad para cada actuador hidráulico, como un elemento controlador, y un dispositivo para la implementación del método.
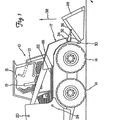
Los sistemas mecánico-hidráulicos con un grado de libertad (mecánica), es decir, los sistemas en los que, por ejemplo, una pieza mecánica con un grado de libertad (sistema de carga) se acciona mediante un cilindro hidráulico (actuador), se presentan en la práctica en una pluralidad de acondicionamientos, por ejemplo, como un rodillo de cesta de una bobinadora, como un elevador del bucle entre dos cajas de un tren de laminación, o como un sistema hidráulico de ajuste de una caja de un tren de laminación, aunque también en aplicaciones generales como sistemas de posicionamiento, mesas vibratorias, etc. Dichos sistemas se pueden hacer vibrar esencialmente debido a las columnas de aceite en el cilindro hidráulico o bien, a otros elementos flexibles en el sistema de carga. Como ejemplos representativos, que de ninguna manera se deben considerar limitantes en relación con la validez general, en este caso se mencionan aplicaciones en las que, por ejemplo, un cilindro lineal hidráulico desplaza una masa alojada de manera pivotante, por ejemplo, un rodillo de cesta, un elevador de bucle, etc. En esta clase de sistemas se observa un comportamiento vibratorio mediante una columna de aceite hidráulica que funciona como un resorte. Esto se manifiesta en una tendencia a las vibraciones no deseada del sistema completo en determinados puntos durante la respuesta de frecuencia: Las frecuencias de resonancia que se producen de esta manera, se determinan esencialmente mediante la masa equivalente del sistema mecánico, las proporciones geométricas, así como la rigidez equivalente de resorte y la flexibilidad que se produzca, como por ejemplo, la comprensibilidad de la columna de aceite, y/o la flexibilidad de una caja de laminación, etc. Para esta clase de sistemas con frecuencias de resonancia características, resulta habitual que en las intervenciones de ajuste desde el exterior, tiendan a producirse vibraciones (amortiguadas). En los procesos de control que tienen por objeto, por ejemplo, poner en marcha un nuevo punto de trabajo, o el control completo de una perturbación que se introduce desde el exterior, dichas vibraciones provocan en los procesos de control variaciones de variables físicas transitorias sumamente indeseadas. En el ejemplo mencionado anteriormente del elevador de bucle, esto repercute en variaciones de la tensión de la banda que, por otra parte, conducen a estrangulamientos indeseados de la banda. En el caso de los rodillos de cesta, dichas variaciones de la presión del rodillo de cesta sobre la banda pueden provocar daños en la superficie mediante compresiones.
Por consiguiente, en la práctica actual, los controladores sólo se regulan, por lo general, muy lentamente para mantener lo más reducidos posible los pulsos de dichas vibraciones indeseadas. Una opción conocida de la literatura habitual consiste en el empleo de los denominados "filtros de muesca", filtros supresores de banda estrecha, que cumplen la función de producir las vibraciones mediante el controlador, a través de una “supresión” controlada del rango de frecuencias, con el fin de evitar las frecuencias de resonancia del sistema a controlar en la variable controlada. Una desventaja perjudicial de dicho método, particularmente en las aplicaciones mencionadas, consiste en el hecho de que la característica del sistema mecánico permanece invariable, y aunque el propio controlador evite un pulso de una vibración, se producen perturbaciones no detectables que actúan desde el exterior, tanto después como antes de las vibraciones del sistema. Las frecuencias de resonancia también dependen del punto de trabajo seleccionado.
Sin embargo, en esta clase de sistemas resulta perjudicial el hecho de que dichos sistemas presenten, por orden, como se ha mencionado, un comportamiento no lineal. Los métodos conocidos como el empleo de filtros de muesca, son métodos que pertenecen a la técnica de control lineal, y en el caso de los sistemas no lineales, sólo resultan válidos en las proximidades del punto de trabajo, para el cual el elemento no lineal se ha tomado como aproximación un sistema lineal. Sin embargo, resulta razonable, por ejemplo, en el caso de mecanismos lineales de accionamiento hidráulico, que se modifiquen también las frecuencias de resonancia mediante la variación de la posición del émbolo del accionamiento hidráulico, y de esta manera, de la columna de aceite. En los métodos descritos anteriormente, existe la posibilidad de seleccionar un filtro de muesca aún más ancho, que por otra parte, limita considerablemente la dinámica del sistema completo.
Los métodos de control convencionales para los sistemas mecánico-hidráulicos, se conocen de las patentes EP 1 152 155 A2 y US 9,502,109.
Un objeto de la presente invención, consiste en desarrollar un método de control o bien, un controlador, que estabilice en toda el área de trabajo, el o los sistemas mecánicos, con un grado de libertad para cada actuador hidráulico, es decir, por orden, un sistema completo no lineal, y simultáneamente, mejora el comportamiento vibratorio del sistema mecánico-hidráulico, y en particular, reduce la tendencia a las vibraciones del sistema mecánico mediante el aporte de una amortiguación activa.
45
Dicho objeto se resuelve para el método de control mediante las características de la reivindicación 1, y para el controlador mediante las características de la reivindicación 10. En el caso del método de control, la presión
deseada del sistema hidráulico
**(Ver fórmula)**
, se considera preferentemente como el término (**(Ver fórmula)**
- ph) en el sistema de control (por ejemplo, control de posición), y/o la velocidad vh del actuador hidráulico, por ejemplo, del émbolo de un cilindro hidráulico, se considera en el sistema de control como una amortiguación, por ejemplo, combinada con una función general C3, a modo de ejemplo, a través de un factor de amortiguación kd, (es decir que se integra a un control, conel efecto de una amortiguación adicional parametrizable), en donde la presión deseada
**(Ver fórmula)**
y/o la velocidad del actuador hidráulico vh se determinan mediante un observador.El controlador, conforme a la presente invención, presenta un sensor de medición para medir la presión ph de un sistema hidráulico, por ejemplo, de un cilindro hidráulico, y un sensor de medición para medir la posición xh del actuador hidráulico, como por ejemplo, del émbolo de un cilindro hidráulico, y se caracteriza porque se provee una unidad de control con las siguientes variables de entrada: la presión hidráulica ph, y la posición xh del actuador hidráulico, en donde en la unidad de control se implementa un observador para la determinación de la presión
deseada
**(Ver fórmula)**
y/o de la velocidad vh del actuador hidráulico, y en la ley de control del controlador, la presión deseada**(Ver fórmula)**
se considera en el sistema de control, preferentemente como el término (**(Ver fórmula)**
- ph), y/o la velocidad vh del actuador hidráulico se considera (o se integra en el control) como una amortiguación, es decir, combinada con una función de transferencia general C3 (por ejemplo, en un caso simplificado, un término proporcional kd). Adicionalmente, se puede prever que la aceleración medida ah del actuador hidráulico en relación con la caja (por ejemplo, la carcasa del cilindro hidráulico) que envuelve el medio hidráulico que aplica una fuerza sobre el actuador hidráulico, se integre al sistema control, generalmente combinada con una función de transferencia general C4.Es decir, que no se requiere de una medición directa de
**(Ver fórmula)**
o vh, aunque en el caso que se pueda realizar una medición de esta clase, naturalmente se puede utilizar.En la presente invención, se puede incorporar al sistema de control, ya sea sólo la presión deseada
**(Ver fórmula)**
en el sistema hidráulico, o sólo la velocidad vh del actuador hidráulico, o ambas variables.Dicho método de control o bien, dicho controlador, estabiliza el sistema mecánico-hidráulico completo, con un grado de libertad independientemente de la selección de la variable de control, como por ejemplo, la posición... [Seguir leyendo]
Reivindicaciones:
1. Método de control de posición para un sistema mecánico-hidráulico con un grado de libertad para cada actuador hidráulico, como un elemento controlado, y con sensores de medición (6, 8) para medir la presión de un sistema hidráulico y para medir la posición del actuador hidráulico
**(Ver fórmula)**
caracterizado porque**(Ver fórmula)**
la presión deseada del sistemahidráulico se considera preferentemente como el término ( -ph) en el sistema de control, y la velocidad vh del
actuador hidráulico (3) se integra como una amortiguación del sistema de control, en donde el valor deseado
**(Ver fórmula)**
y la velocidad del actuador hidráulico vh se determinan mediante un observador, y en donde la velocidad del actuador hidráulico vh se integra a la señal de salida del controlador (R).2. Método de control de posición de acuerdo con la reivindicación 1, caracterizado porque para el observador se utiliza un modelo matemático del elemento controlado, en el cual la variable de entrada está sujeta a una transformación de una variable de ajuste, en una nueva variable de entrada uobs, de manera que el modelo matemático del elemento controlado resulte lineal para el observador.
3. Método de control de posición de acuerdo con una reivindicación 1 ó 2, caracterizado porque el sistema mecánico de carga se representa como un modelo matemático, en donde el sistema de ecuaciones se representa, por ejemplo, con métodos de la mecánica analítica, en este caso, por ejemplo, con la ayuda del formalismo de Lagrange,
4. Método de control de posición de acuerdo con la reivindicación 3, caracterizado porque en el caso de una matriz de masa no constante para el diseño del observador, se realiza una transformación de coordenadas y una transformación de la variable de ajuste, de manera que mediante las coordenadas transformadas se representa la matriz de masa como una constante.
5. Método de control de posición de acuerdo con la reivindicación 1, caracterizado porque en el caso de una matriz de masa no constante, se utiliza un observador no lineal, en el cual se considera implícitamente la transformación de coordenadas y de las variables de ajuste, de acuerdo con la reivindicación 4.
**(Ver fórmula)** **(Ver fórmula)** porque la presión deseada **(Ver fórmula)**
determinado mediante el observador que cumple la función de un observador de una variable perturbadora.
**(Ver fórmula)** observador se determina el pulso **(Ver fórmula)**
8. Método de control de posición de acuerdo con una de las reivindicaciones 1 a 7, caracterizado porque la velocidad vh de un actuador hidráulico combinada con una función de transferencia general (C3), se integra a un circuito de control cerrado.
9. Método de control de posición de acuerdo con una de las reivindicaciones 1 a 8, caracterizado porque la aceleración ah medida de un actuador hidráulico, combinada con una función de transferencia general (C4), se integra al sistema de control.
10. Controlador de posición para un sistema mecánico-hidráulico con un grado de libertad para cada actuador hidráulico, como un elemento controlado, y un sensor de medición (6) para medir la presión ph de un sistema hidráulico, por ejemplo, de un cilindro hidráulico (3), y un sensor de medición (8) para medir la posición xh del actuador hidráulico, por ejemplo, del émbolo de un cilindro hidráulico (3), caracterizado porque a una unidad de control se provee la presión hidráulica ph y la posición del actuador hidráulico xh como variables de entrada, y en
dicha unidad de control se implementa un observador para la determinación de la presión deseada
**(Ver fórmula)**
del sistema hidráulico, y de la velocidad vh del actuador hidráulico (3), y en la ley de control del controlador, la presión deseada**(Ver fórmula)**
se considera en el sistema de control, preferentemente como el término (**(Ver fórmula)**
- ph), y la velocidad vh del actuadorhidráulico se puede integrar como una amortiguación del sistema de control, en donde esto se produce en la salida del controlador (R).
11. Controlador de posición de acuerdo con la reivindicación 10, caracterizado porque la aceleración medida ah del
actuador hidráulico, combinada con una función de transferencia general (C4), se puede integrar al sistema de 5 control.
12. Controlador de posición de acuerdo con la reivindicación 10 u 11, caracterizado porque la velocidad vh de un actuador hidráulico, combinada con una función de transferencia general (C3), se puede integrar a un circuito de control cerrado.
13. Controlador de posición de acuerdo con una de las reivindicaciones 10 a 12, caracterizado porque el
10 controlador se puede conmutar en una pluralidad de modos de control, a los cuales se integran una pluralidad de amortiguaciones.
Patentes similares o relacionadas:
SISTEMA PRINCIPAL DE SERVO-ACTUACION DE PISTON CON SISTEMA DE AUTOCONTENCION DE FALLOS., del 1 de Agosto de 2004, de INDUSTRIA DE TURBO PROPULSORES S.A.: Sistema principal de servo-actuación de pistón con sistema de actuación de fallos, que comprende dos servo-válvulas (1 y 2), y un pistón unido mecánicamente a un transductor […]
ACCIONADORES POR FLUIDO., del 1 de Diciembre de 1996, de ROSE, NIGEL ERIC: UN ACTUADOR FLUIDO INCLUYENDO UNA CAMARA EN LA CUAL SE INVIERTE UN MONTAJE DE PISTONES . EL MONTAJE DE PISTON INCLUYE UN PAR DE PISTONES (18, […]
SERVOSISTEMA., del 1 de Noviembre de 1995, de WAYSIA IND. CO. LTD. UNA CORPORACION DE TAIWAN: SERVOSISTEMA QUE COMPRENDE: --UN CUERPO MOVIDO. --UNA UNIDAD MOTRIZ HIDRAULICA PARA MOVER DICHO CUERPO MOVIDO. --UNA SERVOVALVULA HIDRAULICA MECANICA QUE COMPRENDE UN CARRETE […]
VALVULA REGULADORA DE PRESION DE FLUIDO., del 1 de Junio de 1992, de BENDIX ESPAÑA S.A.: VALVULA REGULADORA DE PRESION DE FLUIDO. SE REFIERE A UNA VALVULA REGULADORA DE PRESION DE FLUIDO, QUE TIENE UNA ENTRADA CONECTADA A UNA FUENTE DE FLUIDO […]
SERVOVALVULA DE MANDO ELECTROMAGNETICO., del 1 de Mayo de 1990, de FIAT AUTO S.P.A.: SERVO-VALVULA DE MANDO ELECTROMAGNETICO PARA EL CONTROL DE UN ACTUADOR DEL TIPO QUE COMPRENDE UNA CORREDERA MOVIL A LO LARGO DEL PROPIO EJE LONGITUDINAL DE […]
ÓRGANO ELÉCTRICO DE ACCIONAMIENTO UTILIZADO COMO CILÍNDRO DE PRESIÓN DE FLUIDO, del 24 de Junio de 2011, de CKD CORPORATION: Un órgano eléctrico de accionamiento que tiene un cuerpo principal y que puede utilizarse en lugar de un cilindro de presión de fluido que forma parte […]
 ACCIONADOR HIDRAULICO MEJORADO PARA UNA CAJA DE CAMBIOS DE UN VEHICULO AUTOMOVIL, del 26 de Junio de 2009, de PEUGEOT CITROËN AUTOMOBILES SA: Accionador hidráulico que comprende un gato de doble efecto provisto de dos cámaras de presión y de un pistón desplazable en traslación siguiendo […]
ACCIONADOR HIDRAULICO MEJORADO PARA UNA CAJA DE CAMBIOS DE UN VEHICULO AUTOMOVIL, del 26 de Junio de 2009, de PEUGEOT CITROËN AUTOMOBILES SA: Accionador hidráulico que comprende un gato de doble efecto provisto de dos cámaras de presión y de un pistón desplazable en traslación siguiendo […]
 DISPOSITIVO DE ANULACION MOMENTANEA DEL BLOQUEO DE TRACCION, del 16 de Diciembre de 2008, de CLARK EQUIPMENT COMPANY: Una máquina motorizada que incluye un mecanismo de tracción para accionar la máquina motorizada, y un actuador asistido, que comprende: un primer sensor que detecta un […]
DISPOSITIVO DE ANULACION MOMENTANEA DEL BLOQUEO DE TRACCION, del 16 de Diciembre de 2008, de CLARK EQUIPMENT COMPANY: Una máquina motorizada que incluye un mecanismo de tracción para accionar la máquina motorizada, y un actuador asistido, que comprende: un primer sensor que detecta un […]