PROCEDIMIENTO DE MEDICIÓN DE UN OBJETO TRIDIMENSIONAL, O DE UN CONJUNTO DE OBJETOS.
Procedimiento de medición de un objeto tridimensional en un entorno tridimensional,
que comprende las etapas de: - tomar al menos una imagen del entorno por medio de al menos una cámara; - detectar las discontinuidades del aspecto de la imagen; - asociar las discontinuidades a los contornos geométricos, teniendo los contornos posiciones y formas sobre la imagen que están definidos por parámetros que incluyen números; - ajustar los contornos geométricos a las discontinuidades haciendo que varíen los parámetros, caracterizado por las etapas de: o asociar numéricamente los contornos geométricos a objetos geométricos del entorno tridimensional, estando definidas una posición tridimensional y una forma volúmica de los objetos geométricos en el entorno por parámetros tridimensionales que incluyen números; o estimar las posiciones tridimensionales y las formas volúmicas de los objetos geométricos en el entorno tridimensional calculando las proyecciones geométricas de los objetos geométricos sobre la citada al menos una imagen mediante un ajuste entre las proyecciones y los contornos geométricos; o y crear una representación del entorno tridimensional, comprendiendo esta representación los objetos geométricos, según los parámetros que definen las posiciones y las formas de los objetos geométricos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2001/001274.
Solicitante: COMMISSARIAT À L'ÉNERGIE ATOMIQUE ET AUX ÉNERGIES ALTERNATIVES
AREVA NC.
Nacionalidad solicitante: Francia.
Dirección: BATIMENT D "LE PONANT" 25, RUE LEBLANC 75015 PARIS FRANCIA.
G06T7/00FISICA. › G06CALCULO; CONTEO. › G06TTRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Análisis de imagen.
Clasificación antigua:
G01B11/00G […] › G01METROLOGIA; ENSAYOS. › G01BMEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00).
G01B11/02G01B […] › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › para la medida de la longitud, la anchura o el espesor (G01B 11/08 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Finlandia, Chipre.
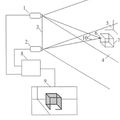
Procedimiento de medición de un objeto tridimensional, o de un conjunto de objetos La invención consiste en un procedimiento que permite determinar la geometría, la posición y la orientación de uno o de varios objetos en un entorno. El objetivo es el de proporcionar informaciones dimensionales o de medición sobre primitivas tridimensionales (puntos, rectas, círculos, cilindros, ...) que representan a estos objetos aprovechando una proyección sobre imágenes adquiridas por medio de uno o de varios sensores. Estos datos dimensionales son aprovechados para el control dimensional de objetos manufacturados (prototipo o serie), para la medición de deformación estructural, o para la modelización de entornos industriales. Existen varias grandes familias de procedimientos para llevar a cabo este tipo de mediciones. Algunas implican una medición directa de los objetos del entorno mediante la punta de un palpador, pero este procedimiento no es siempre posible de aplicar y resulta muy largo cuando el entorno es voluminoso, de grandes dimensiones o de forma complicada; también es impensable cuando tiene las dimensiones de un local entero. Otros procedimientos recurren a la telemetría, es decir, que se miden las distancias a diferentes puntos del entorno sin contacto material; un láser es dirigido sucesivamente hacia esos puntos y la medición es el tiempo de vuelo o el desfasaje de la onda. Se utiliza un espejo o un sistema mecánico para dirigir incesantemente el rayo del láser hacia otros puntos, lo que permite mediciones rápidas del entorno, pero se observa que este procedimiento no es siempre muy preciso (aunque la resolución no esté limitada más que por el sistema de barrido del láser) y va acompañado de errores cuando el haz toca objetos reflectantes, y también se necesita asegurar la estabilidad del sistema mecánico durante el barrido y vigilar la seguridad de las personas susceptibles de encontrarse en el volumen de medición. Otros procedimientos son procedimientos ópticos en los que una cámara es desplazada por delante del entorno que se va a medir y toma una sucesión de imágenes. Los detalles del entorno son identificados sobre las diferentes imágenes y su posición, y se calculan mediante triangulaciones según su posición sobre las imágenes respectivas y las posiciones conocidas por anticipado de la cámara, en función de los parámetros de toma de imagen por la misma. A veces, se identifica una red de puntos del entorno, que han sido iluminados por un láser o por un proyector de un haz de rayos; se puede añadir una luz adicional para iluminar mejor los alrededores de la red de puntos y hacerlos resaltar respecto al resto del entorno. La utilización de un medio de iluminación recurre a los procedimientos de telemetría y entraña inconvenientes análogos de imprecisión y de inseguridad, que no compensan siempre la rapidez y la facilidad de identificación, ni los cálculos que con frecuencia se pueden conseguir. En otros procedimientos, los puntos a medir son fuentes luminosas, marcas reflectantes o coloreadas dispuestas con anterioridad en el entorno. Estos procedimientos dan buenos resultados si las marcas y su posición han sido elegidas convenientemente, pero no son aplicables en todos los casos y en particular para entornos complicados y de gran tamaño: las mismas se muestran sobre todo interesantes para seguir la posición de un objeto determinado y móvil en el entorno más que para medir el entorno en sí mismo. Por último, otros procedimientos ópticos están fundamentados en la ausencia de marcas en el entorno y en la medición de ciertos puntos de interés de las imágenes. Los puntos de interés se eligen automáticamente o a través del operador en el caso de procedimientos interactivos. Estos procedimientos tienen la ventaja de ser universales o aplicables teóricamente a cualquier entorno, pero no resulta siempre fácil disponer de puntos de interés suficientemente numerosos, y que sean comunes a todas las imágenes; la etapa de aparición de los puntos homólogos en imágenes diferentes puede ser delicada; además, una descripción de un entorno por medio de puntos, incluso aunque sean numerosos, es poco evocadora. La invención constituye un procedimiento que forma parte de los procedimientos puramente ópticos y, de manera más precisa, de los que incluyen un análisis de imagen. Este nuevo procedimiento puede incluir triangulaciones, pero se distingue fundamentalmente de los procedimientos anteriores por el hecho de que interesa en este caso distinguir los detalles del entorno más que trazar una cartografía de esos puntos. Con frecuencia, resulta en efecto más fácil y fructífero discernir un elemento preciso del entorno y distinguirlo del resto, que disponer de un conocimiento completo pero indistinto de ese entorno. En el caso, frecuente en la práctica, de medición de locales industriales, esta consideración será por tanto más importante de lo que lo son los elementos y obstáculos, con frecuencia numerosos pero de forma simple, de modo que se superponen y crean un relieve muy complicado, pero que el aprovechamiento de la representación realizada es mucho más fácil cuando se han distinguido estos elementos y se les ha caracterizado por medio de algunos parámetros de posición y de forma. Las ventajas ofrecidas por el procedimiento son múltiples: no hay necesidad de llenar el entorno con marcas específicas; se aprovecha una porción mucho más importante de la información de las imágenes que si se ocupa de puntos de interés, lo que debe dar una mayor precisión de la representación que se obtiene; el procedimiento es eficaz incluso con superficies variables, difusoras o reflectantes; es aplicable a volúmenes variados, eventualmente muy grandes; la duración de adquisición es extremadamente rápida, de algunas decenas de milisegundos; resulta posible una automatización completa del procedimiento; la representación puede ser concluida posteriormente 2 ES 2 367 776 T3 añadiendo nuevas entidades, que hayan sido omitidas con anterioridad, o corrigiéndolas por medio de actualizaciones o de otras operaciones; y como la misma encuentra inmediatamente un modelo concreto del entorno, ésta puede ser aprovechada de forma inmediata, mientras que una cartografía de puntos necesita ser interpretada. El procedimiento está fundamentado en un sistema compuesto por cinco módulos principales de acuerdo con la siguiente lista: - un módulo de tratamiento de imágenes que asegura la localización precisa de los contornos naturales de los objetos que se han de reconstruir; - un módulo de reconstrucción y localización que determina los parámetros geométricos de los objetos y la situación de un sistema de captura de imágenes; - un módulo de identificación que realiza la búsqueda automática de los contornos naturales de los objetos ya reconstruidos; - un módulo de emparejamiento de puntos de interés, para ayudar a reemplazar estos contornos de objetos reconstruidos sobre una nueva imagen; - y un módulo de reconstrucción en bloque, que realiza un cálculo de conjunto (recapitulativo) en vista de todas las informaciones disponibles y que mejora considerablemente la precisión. La puesta en práctica de este procedimiento necesita una o varias videocámaras calibradas con anterioridad (aunque el calibrado no sea necesario si se limita a primitivas de tipo puntual), con el fin de disponer de la relación entre cualquier punto de la imagen y la posición del rayo luminoso asociado. Los calibrados previos ya han sido descritos por diferentes autores; se puede citar el artículo de Viala, Chevillot, Guérin y Lavest Puesta en práctica de un procedimiento de calibrado preciso de cámara CCD, presentado en el 11º congreso de Reconocimiento de formas e Inteligencia Artificial (Clermont-Ferrand, 20 a 22 de Enero de 1998). Cuando se emplean varias cámaras, se habla de un sistema estereoscópico apto para proporcionar automáticamente un modelo tridimensional del entorno mediante una búsqueda de puntos homólogos sobre las imágenes y triangulaciones. Si se emplea una sola cámara, se puede obtener el mismo resultado por medio de imágenes sucesivas desplazando la cámara una cantidad determinada. Esta cantidad puede ser determinada igualmente, a posteriori, mediante cálculo si se dispone en el entorno de un metro graduado. Para resumir, la invención es relativa a un procedimiento de medición de objetos tridimensionales en un entorno tridimensional, conforme a la reivindicación 1. El documento IEEE Transactions on Pattern Analysis and Machine Intelligence, Volumen 21, Issue 9 (September 1999), Part-Based 3D Descriptions of Complex Objects from a Single Image, páginas 835 848, describe un procedimiento para describir objetos complejos en una escena a partir de una imagen descomponiendo los objetos 3D en partes volúmicas, detectando las discontinuidades... [Seguir leyendo]
Reivindicaciones:
1.- Procedimiento de medición de un objeto tridimensional en un entorno tridimensional, que comprende las etapas de: - tomar al menos una imagen del entorno por medio de al menos una cámara; - detectar las discontinuidades del aspecto de la imagen; - asociar las discontinuidades a los contornos geométricos, teniendo los contornos posiciones y formas sobre la imagen que están definidos por parámetros que incluyen números; - ajustar los contornos geométricos a las discontinuidades haciendo que varíen los parámetros, caracterizado por las etapas de: o asociar numéricamente los contornos geométricos a objetos geométricos del entorno tridimensional, estando definidas una posición tridimensional y una forma volúmica de los objetos geométricos en el entorno por parámetros tridimensionales que incluyen números; o estimar las posiciones tridimensionales y las formas volúmicas de los objetos geométricos en el entorno tridimensional calculando las proyecciones geométricas de los objetos geométricos sobre la citada al menos una imagen mediante un ajuste entre las proyecciones y los contornos geométricos; o y crear una representación del entorno tridimensional, comprendiendo esta representación los objetos geométricos, según los parámetros que definen las posiciones y las formas de los objetos geométricos. 2.- Procedimiento según la reivindicación 1, caracterizado porque los contornos geométricos comprenden el punto, la línea recta y los objetos comprenden el círculo, el cilindro, la recta y el punto. 3.- Procedimiento según la reivindicación 2, caracterizado porque los parámetros comprenden las coordenadas cartesianas planas, los ángulos y las longitudes. 4.- Procedimiento según una cualquiera de las reivindicaciones 1, 2 y 3, caracterizado porque la citada al menos una imagen es convertida en una imagen de una función de potencial (Pe) calculada sobre los puntos de la imagen, proporcionando la función de potencial valores extremos en las discontinuidades. 5.- Procedimiento según la reivindicación 4, caracterizado porque la función de potencial comprende un término que tiene en cuenta zonas de muy baja intensidad de nivel de grises de la imagen. 6.- Procedimiento según la reivindicación 1, caracterizado porque la representación comprende una posición de la al menos una cámara (8, 9). 7.- Procedimiento según la reivindicación 6, caracterizado porque las proyecciones geométricas (z) se determinan por medio de relaciones (h) que utilizan posiciones las estimadas (x) de los objetos geométricos en la representación, y los parámetros (Rk l , tk l ) de posición de la cámara. 8.- Procedimiento según la reivindicación 1, caracterizado porque la representación comprende estimaciones iniciales sobre las posiciones de los objetos geométricos, que son especificadas manualmente o a través de un fichero informático de descripción, y la representación se crea ajustando progresivamente las estimaciones de tal modo que se mejora el ajuste entre las proyecciones de los objetos geométricos y los contornos geométricos de la al menos una imagen. 9.- Procedimiento según la reivindicación 1, caracterizado porque se toma una pluralidad de imágenes sucesivamente mediante adquisiciones de nuevas imágenes, y las estimaciones de posición de los objetos de la representación son afinadas re-proyectando los objetos geométricos de la representación sobre cada nueva imagen. 10.- Procedimiento según la reivindicación 9, caracterizado porque incluye, para cada nueva imagen, una estimación de localización de la cámara correspondiente a la mejor concordancia entre la representación del entorno y la citada nueva imagen, y porque la representación es afinada utilizando la citada estimación de localización. 11.- Procedimiento según la reivindicación 9, caracterizado porque los objetos geométricos son proyectados sobre cada nueva imagen con anterioridad a detectar las discontinuidades de aspecto de la citada nueva imagen, de manera que se proporcionan los contornos que sirven de estimaciones preliminares en las citadas discontinuidades de aspecto de la nueva imagen. 12.- Procedimiento según la reivindicación 11, caracterizado porque las estimaciones de la posición de los objetos en la representación son afinadas ajustando las proyecciones de los objetos en las discontinuidades de aspecto de la nueva imagen, sin asociar las citadas discontinuidades a los contornos geométricos. 12 ES 2 367 776 T3 13.- Procedimiento según una cualquiera de las reivindicaciones anteriores, caracterizado porque comprende una etapa final de ajuste de la representación del entorno calculando, y después minimizando, una funcionalidad de error (F), que expresa las separaciones de las proyecciones de los objetos de la representación sobre las imágenes y los contornos geométricos sobre las citadas imágenes, en función de parámetros específicos de las cámaras (xM) y de parámetros de los objetos (xG), haciendo que varíen algunos al menos de los citados parámetros (x). 13 ES 2 367 776 T3 14 ES 2 367 776 T3 ES 2 367 776 T3 16 ES 2 367 776 T3 17 ES 2 367 776 T3 18
Patentes similares o relacionadas:
SISTEMA Y METODO DE CAPTURA, PROCESAMIENTO Y REPRESENTACION DE LOCALIZAMIENTO TRIDIMENSIONAL EN TIEMPO REAL DE UNA SEÑAL OPTICA, del 22 de Febrero de 2010, de UNIVERSIDAD DE CORDOBA: Sistema de captura y representación de posicionamientos tridimensionales en tiempo real.
Cuenta con al menos dos cámaras separadas por unas distancias […]
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UN CONTORNO CELULAR DE UNA CÉLULA, del 4 de Febrero de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para determinar un contorno celular de una célula con un núcleo celular y un plasma celular en una imagen de la célula, que comprende: […]
ANALISIS DE UNA IMAGEN MEDICA, del 24 de Agosto de 2010, de BOSTON SCIENTIFIC LIMITED: Un procedimiento de análisis de una imagen médica que comprende:
recibir una imagen médica ;
analizar la imagen médica;
determinar […]
SISTEMA DE DETECCION DEL ESTADO DE PANTOGRAFOS DE TRENES, del 27 de Octubre de 2010, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): 1. Sistema de detección del estado de pantógrafos de trenes.
Comprende al menos una primera cámara de vídeo para captar la imagen del pantógrafo de un […]
ANÁLISIS DE LAPSOS TEMPORALES DEL CICLO CELULAR DE NÚCLEOS NO TINCIONADOS, del 7 de Febrero de 2012, de GENERAL ELECTRIC COMPANY: Un procedimiento para hacer un seguimiento automáticamente de una fase del ciclo celular de una célula, comprendiendo el procedimiento las etapas de: […]
Método, sistema y producto del programa informático para determinar la presencia de microorganismos e identificar dichos microorganismos, del 29 de Julio de 2020, de BIOMERIEUX: Un método para determinar la presencia de al menos un microorganismo determinado en una placa de Petri que comprende una o más colonias de microorganismos y un medio de […]
Detección de daño de pantalla para dispositivos, del 8 de Julio de 2020, de Hyla, Inc: Un procedimiento para identificar una condición de una o más pantallas de un dispositivo electrónico, comprendiendo el procedimiento:
recibir una solicitud […]
PROCEDIMIENTO DE IDENTIFICACIÓN DE IMÁGENES ÓSEAS, del 29 de Junio de 2020, de UNIVERSIDAD DE GRANADA: Procedimiento de identificación de imágenes óseas.
La presente invención tiene por objeto un procedimiento para asistir en la toma de decisiones a un experto forense […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 SISTEMA Y METODO DE CAPTURA, PROCESAMIENTO Y REPRESENTACION DE LOCALIZAMIENTO TRIDIMENSIONAL EN TIEMPO REAL DE UNA SEÑAL OPTICA, del 22 de Febrero de 2010, de UNIVERSIDAD DE CORDOBA: Sistema de captura y representación de posicionamientos tridimensionales en tiempo real.
Cuenta con al menos dos cámaras separadas por unas distancias […]
SISTEMA Y METODO DE CAPTURA, PROCESAMIENTO Y REPRESENTACION DE LOCALIZAMIENTO TRIDIMENSIONAL EN TIEMPO REAL DE UNA SEÑAL OPTICA, del 22 de Febrero de 2010, de UNIVERSIDAD DE CORDOBA: Sistema de captura y representación de posicionamientos tridimensionales en tiempo real.
Cuenta con al menos dos cámaras separadas por unas distancias […] PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UN CONTORNO CELULAR DE UNA CÉLULA, del 4 de Febrero de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para determinar un contorno celular de una célula con un núcleo celular y un plasma celular en una imagen de la célula, que comprende: […]
PROCEDIMIENTO Y DISPOSITIVO PARA DETERMINAR UN CONTORNO CELULAR DE UNA CÉLULA, del 4 de Febrero de 2011, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Procedimiento para determinar un contorno celular de una célula con un núcleo celular y un plasma celular en una imagen de la célula, que comprende: […] ANALISIS DE UNA IMAGEN MEDICA, del 24 de Agosto de 2010, de BOSTON SCIENTIFIC LIMITED: Un procedimiento de análisis de una imagen médica que comprende:
recibir una imagen médica ;
analizar la imagen médica;
determinar […]
ANALISIS DE UNA IMAGEN MEDICA, del 24 de Agosto de 2010, de BOSTON SCIENTIFIC LIMITED: Un procedimiento de análisis de una imagen médica que comprende:
recibir una imagen médica ;
analizar la imagen médica;
determinar […] SISTEMA DE DETECCION DEL ESTADO DE PANTOGRAFOS DE TRENES, del 27 de Octubre de 2010, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): 1. Sistema de detección del estado de pantógrafos de trenes.
Comprende al menos una primera cámara de vídeo para captar la imagen del pantógrafo de un […]
SISTEMA DE DETECCION DEL ESTADO DE PANTOGRAFOS DE TRENES, del 27 de Octubre de 2010, de ADMINISTRADOR DE INFRAESTRUCTURAS FERROVIARIAS (ADIF): 1. Sistema de detección del estado de pantógrafos de trenes.
Comprende al menos una primera cámara de vídeo para captar la imagen del pantógrafo de un […]