MECANISMO DE ENGRANAJES MULTIPLICADOR DE FUERZA.
1. Mecanismo de engranajes multiplicador de fuerza caracterizado porque comprende una pluralidad de ruedas dentadas (1,
2, 1', 2') situadas sobre dos ejes (3, 3') y solidariamente unidas a sendas palancas de accionamiento (4, 4', 5, 5'), de tal forma que dichas ruedas dentadas están engranadas entre sí por pares, accionándose por medio de las citadas palancas, y ejerciendo un efecto multiplicador en su movimiento sobre los citados ejes (3, 3') por medio de un conjunto de cadena (6) y piñones (7), solidariamente unido a los citados ejes superior (3) e inferior (3') a través de una pluralidad de rodamientos (8).2. Mecanismo de engranajes de acuerdo con la reivindicación 1 que se caracteriza porque sobre el eje superior (3) se sitúan, concéntricos al mismo, una pareja de ruedas dentadas, superior izquierda (1) y superior derecha (2), en donde cada una de ellas lleva solidariamente unidas una palanca, superior izquierda (4) y superior derecha (5).3. Mecanismo de engranajes de acuerdo con la reivindicación 1 y 2 que se caracteriza porque sobre el eje inferior (3') se sitúan de forma concéntrica a dicho eje inferior (3'), una pareja de ruedas dentadas, inferior izquierda (1') e inferior derecha (2'), en donde cada una de ellas lleva solidariamente unidas una palanca, inferior izquierda (4') e inferior derecha (5').4. Mecanismo de engranajes de acuerdo con las reivindicaciones anteriores que se caracteriza porque las ruedas dentadas superiores (1, 2) están engranadas con sus correspondientes ruedas inferiores (1', 2'), mientras que entre ambas parejas de engranajes, los ejes superior (3) e inferior (3') se encuentran unidos, mediante rodamientos (8), a un mecanismo de piñón (7) y cadena (6), de tal forma que, al ejercer dos fuerzas independientes entre sí, en ambos conjuntos de engranajes derecho (2, 2') e izquierdo (1, 1'), por medio de sus respectivas palancas, derecha (5, 5') e izquierda (4, 4'), se otorga un movimiento continuo sobre el eje inferior (3') y/o superior (3)
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201130002.
Solicitante: MARTINEZ MARTINEZ, JOSE
HERNANDIS ORTUÑO, BERNABE
AGUSTIN FONFRIA, MIGUEL ANGEL.
Nacionalidad solicitante: España.
Provincia: VALENCIA.
Inventor/es: MARTINEZ MARTINEZ,JOSE.
Fecha de Solicitud: 3 de Enero de 2011.
Fecha de Publicación: .
Fecha de Concesión: 23 de Septiembre de 2011.
Clasificación PCT:
- F16H1/22 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 1/00 Transmisiones de engranajes para transmitir un movimiento rotativo (particulares para transmitir un movimiento rotativo con relación de velocidad variable, o para invertir el movimiento rotativo F16H 3/00). › con varios ejes de accionamiento o accionados; con dispositivos para repartir el par entre dos o varios ejes intermedios.
Descripción:
Mecanismo de engranajes multiplicador de fuerza.
El objeto de la presente invención es un mecanismo de engranajes multiplicador de la fuerza ejercida sobre, al menos, una palanca que con su movimiento acciona una pluralidad de ruedas dentadas que, a su vez, mueven una cadena que otorga un movimiento continuo a un eje que puede conectarse con cualquier generador de energía eléctrica.
Estado de la técnica anterior
Son conocidos los mecanismos basados en ruedas dentadas engranadas entre sí que permite la acción de un eje. No obstante, todos parten de una misma premisa: o bien el punto de accionamiento es único, o bien al requerir varios puntos de accionamiento, la fuerza que se ejerce, o se ha de ejercer sobre esos puntos ha de ser aproximadamente igual entre sí, con las limitaciones que ello implica.
Explicación de la invención
Para paliar los problemas técnicos descritos, el mecanismo de engranajes multiplicador de fuerza se caracteriza porque comprende una pluralidad de ruedas dentadas situadas sobre dos ejes y solidariamente unidas a sendas palancas de accionamiento, de tal forma que dichas ruedas dentadas están engranadas entre sí por pares, accionándose por medio de las citadas palancas, y ejerciendo un efecto multiplicador en su movimiento sobre los citados ejes por medio de un conjunto de cadena y piñones, solidariamente unido a los citados ejes superior e inferior a través de una pluralidad de rodamientos.
Así pues, las ruedas dentadas superiores están engranadas con sus correspondientes ruedas inferiores, mientras que entre ambas parejas de engranajes, los ejes superior e inferior se encuentran unidos a un mecanismo de piñón y cadena a través de los rodamientos, de tal forma que, al ejercer dos fuerzas independientes entre sí, en ambos conjuntos de engranajes derecho e izquierdo, por medio de sus respectivas palancas, se otorga un movimiento continuo sobre los ejes.
Es importante que la fuerza ejercida sobre las palancas se haga en el mismo lado. Es decir, las citadas palancas tienen dos brazos, que podemos denominar frontal y posterior, pues bien, la fuerza se ha de ejercer de forma independiente pero sobre uno de los dos lados, bien frontal, bien posterior, para que el movimiento de los ejes sea continuo y uniformemente acelerado.
A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus variantes no pretenden excluir otras características técnicas, aditivos, componentes o pasos. Para los expertos en la materia, otros objetos, ventajas y características de la invención se desprenderán en parte de la descripción y en parte de la práctica de la invención. Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se pretende que sean limitativos de la presente invención. Además, la presente invención cubre todas las posibles combinaciones de realizaciones particulares y preferidas aquí indicadas.
Breve descripción de los dibujos
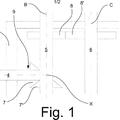
Fig 1. Muestra una vista en perspectiva del mecanismo de engranajes multiplicador de fuerza sobre un eje, objeto de la presente invención.
Fig 2. Muestra una segunda vista en perspectiva superior del mecanismo de engranajes multiplicador de fuerza sobre un eje, objeto de la presente invención.
Exposición detallada de modos de realización
Tal y como puede observarse en las figuras adjuntas, el mecanismo de engranajes multiplicador de fuerza comprende una pluralidad de ruedas dentadas (1, 2, 1', 2') situadas sobre dos ejes (3, 3') y solidariamente unidas a sendas palancas de accionamiento (4, 4', 5, 5'), de tal forma que dichas ruedas dentadas están engranadas entre sí por pares, accionándose por medio de las citadas palancas, y ejerciendo un efecto multiplicador en su movimiento sobre los citados ejes (3, 3') por medio de un conjunto de cadena (6) y piñones (7), solidariamente unido a los citados ejes superior (3) e inferior (3').
Más concretamente, y como se aprecia en la figura 1, sobre el eje superior (3) se sitúan, concéntricos al mismo, una pareja de ruedas dentadas, superior izquierda (1) y superior derecha (2), en donde cada una de ellas lleva solidariamente unidas una palanca, superior izquierda (4) y superior derecha (5).
Por otro lado, sobre el eje inferior (3'), de forma análoga al eje superior (3), se sitúan de forma concéntrica a dicho eje inferior (3'), una pareja de ruedas dentadas, inferior izquierda (1') e inferior derecha (2'), en donde cada una de ellas lleva solidariamente unidas una palanca, inferior izquierda (4') e inferior derecha (5').
Las citadas ruedas dentadas están engranadas entre sí, de tal forma que las superiores (1, 2) están engranadas con sus correspondientes ruedas inferiores (1', 2'), mientras que entre ambas parejas de engranajes, los ejes superior (3) e inferior (3') se encuentran unidos, mediante sendos rodamientos (8), a un mecanismo de piñón (7) y cadena (6), de tal forma que, al ejercer dos fuerzas independientes entre sí, en ambos conjuntos de engranajes derecho (2, 2') e izquierdo (1, 1'), por medio de sus respectivas palancas, derecha (5, 5') e izquierda (4, 4'), se otorga un movimiento continuo sobre el eje inferior (3') y/o superior (3).
Es importante que la fuerza ejercida sobre las palancas (4, 4', 5, 5') se haga en el mismo lado. Es decir, las citadas palancas tienen dos brazos, que podemos denominar frontal y posterior, pues bien, la fuerza se ha de ejercer de forma independiente pero sobre uno de los dos lados, bien frontal, bien posterior, para que el movimiento de los ejes sea continuo y uniformemente acelerado.
Reivindicaciones:
1. Mecanismo de engranajes multiplicador de fuerza caracterizado porque comprende una pluralidad de ruedas dentadas (1, 2, 1', 2') situadas sobre dos ejes (3, 3') y solidariamente unidas a sendas palancas de accionamiento (4, 4', 5, 5'), de tal forma que dichas ruedas dentadas están engranadas entre sí por pares, accionándose por medio de las citadas palancas, y ejerciendo un efecto multiplicador en su movimiento sobre los citados ejes (3, 3') por medio de un conjunto de cadena (6) y piñones (7), solidariamente unido a los citados ejes superior (3) e inferior (3') a través de una pluralidad de rodamientos (8).
2. Mecanismo de engranajes de acuerdo con la reivindicación 1 que se caracteriza porque sobre el eje superior (3) se sitúan, concéntricos al mismo, una pareja de ruedas dentadas, superior izquierda (1) y superior derecha (2), en donde cada una de ellas lleva solidariamente unidas una palanca, superior izquierda (4) y superior derecha (5).
3. Mecanismo de engranajes de acuerdo con la reivindicación 1 y 2 que se caracteriza porque sobre el eje inferior (3') se sitúan de forma concéntrica a dicho eje inferior (3'), una pareja de ruedas dentadas, inferior izquierda (?) e inferior derecha (2'), en donde cada una de ellas lleva solidariamente unidas una palanca, inferior izquierda (4') e inferior derecha (5').
4. Mecanismo de engranajes de acuerdo con las reivindicaciones anteriores que se caracteriza porque las ruedas dentadas superiores (1, 2) están engranadas con sus correspondientes ruedas inferiores (1', 2'), mientras que entre ambas parejas de engranajes, los ejes superior (3) e inferior (3') se encuentran unidos, mediante rodamientos (8), a un mecanismo de piñón (7) y cadena (6), de tal forma que, al ejercer dos fuerzas independientes entre sí, en ambos conjuntos de engranajes derecho (2, 2') e izquierdo (1, 1'), por medio de sus respectivas palancas, derecha (5, 5') e izquierda (4, 4'), se otorga un movimiento continuo sobre el eje inferior (3') y/o superior (3).
Patentes similares o relacionadas:
Transmisión para motor, del 22 de Julio de 2020, de Mbi Co. Ltd: Una transmisión para un motor , la transmisión recibe una fuerza rotacional de un eje giratorio de un motor para realizar […]
Estructura de radar, del 15 de Abril de 2020, de THALES: Estructura de radar del tipo que incluye al menos dos motorreductores asociados a través de medios de unión a una estructura […]
Cojinete de momentos, aerogenerador y vehículo, del 1 de Abril de 2020, de IMO HOLDING GMBH: Cojinete de momentos , que comprende al menos una hilera de rodamientos , y - dos partes de carcasa anulares , que están dispuestas de forma giratoria […]
Deslizador activo de reposicionamiento de quinta rueda, del 6 de Noviembre de 2019, de SAF-HOLLAND, INC: Una disposición de ajuste de enganche de quinta rueda para ajustar una posición de una placa de enganche de quinta rueda a lo largo de una […]
Unión giratoria de un aerogenerador y dentado para una unión giratoria, del 30 de Octubre de 2019, de NORDEX ENERGY GMBH: Unión giratoria de un aerogenerador compuesta por un cojinete con un anillo interior y con un anillo exterior , fabricados a […]
 Molino de rodillos para piensos y alimentos con un engranaje, del 28 de Agosto de 2019, de BUHLER AG: Molino de rodillos para piensos y alimentos que comprende al menos dos rodillos alojados de forma rotatoria , apoyándose al menos uno de los […]
Molino de rodillos para piensos y alimentos con un engranaje, del 28 de Agosto de 2019, de BUHLER AG: Molino de rodillos para piensos y alimentos que comprende al menos dos rodillos alojados de forma rotatoria , apoyándose al menos uno de los […]
Transmisión para un procesador de alimentos, del 22 de Febrero de 2019, de BSH HAUSGERÁTE GMBH: Transmisión para un procesador de alimentos con un árbol de entrada en el lado del accionamiento y con al menos un árbol de salida en el lado de arrastre, […]
Unidad de engranaje de vehículo móvil, del 27 de Diciembre de 2017, de Autoinvent Transip AB: Unidad de engranaje de vehículo móvil que comprende un árbol de salida y un árbol de entrada sustancialmente paralelo con dicho árbol de […]